 HPM6750 测评 | 不写一行代码,两分钟实现WiFi联网
HPM6750 测评 | 不写一行代码,两分钟实现WiFi联网
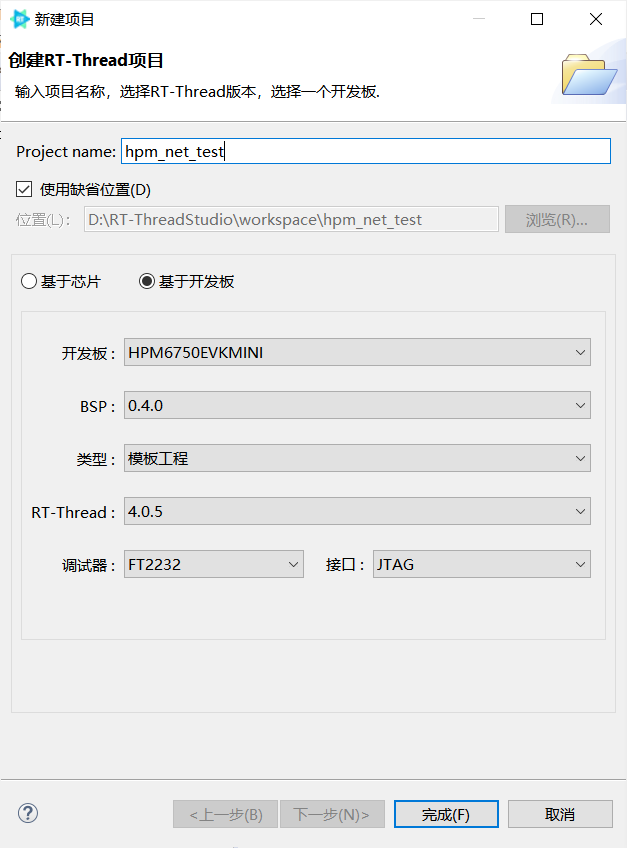
一、创建RT-Thread项目
开始本篇实验前,需要搭建RT-Thread开发环境,具体可以参考:“快来看!先楫芯与RT-Thread碰出火花了”
使用RT-Thread Studio创建名为hpm_net_test的项目:
二、为项目添加RW007支持
2.1 打开RT-Thread Settings
项目创建成功后,打开项目的RT-Thread Settings界面:
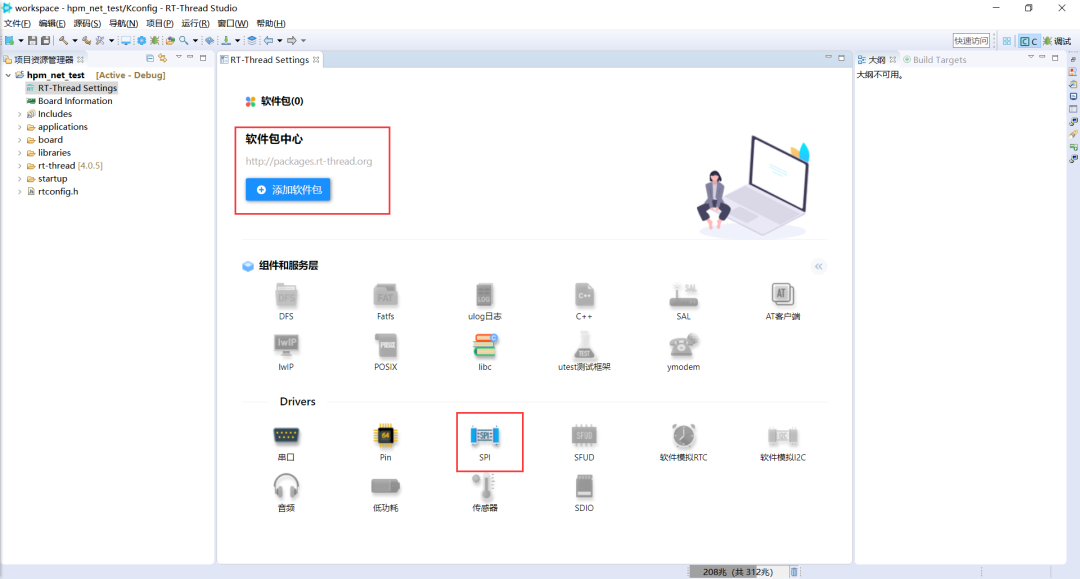
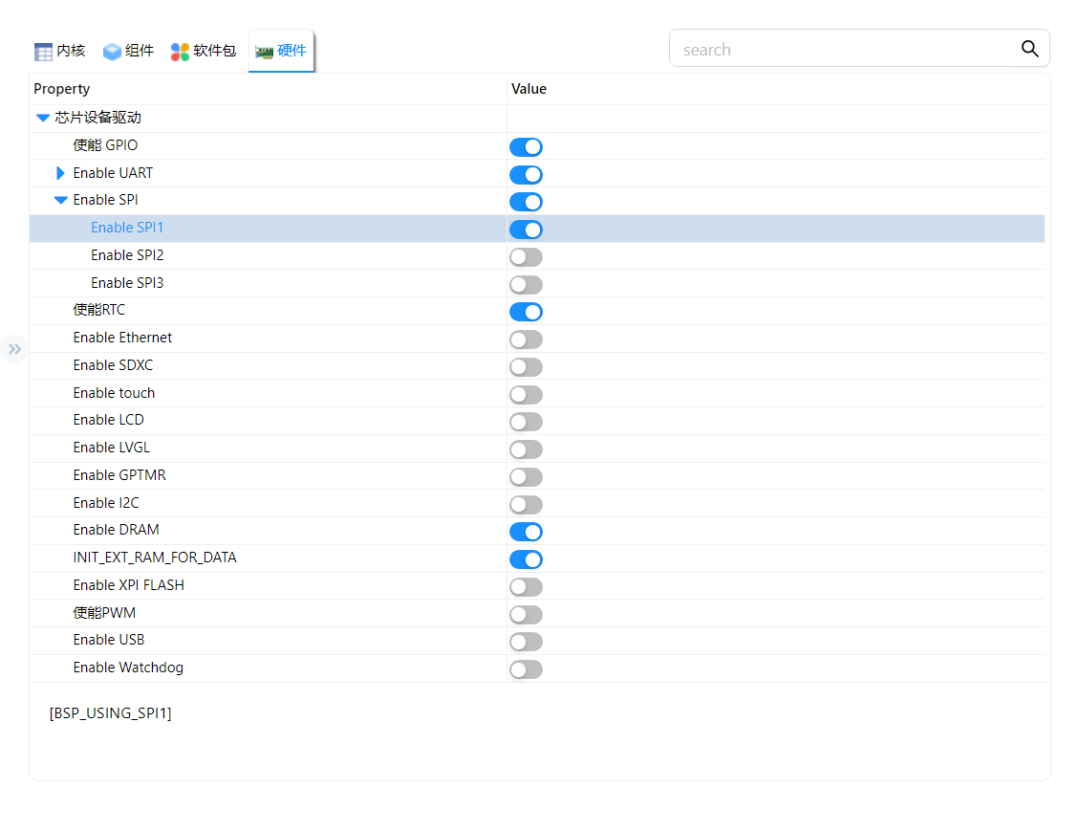
可以看到,默认情况下SPI驱动框架已经打开了。
BSP中的SPI1驱动也已经打开了:
2.2 添加RW007软件包
在RT-Thread Settings界面,通过点击“添加软件包”按钮,会弹出RT-Thread Package Center界面:

在中间的搜索框中输入RW007,回车,可以找到RW007驱动程序软件包:

点击界面“添加”按钮,即可将RW007软件包添加到当前项目的包配置中了,此时软件包并没有真正下载下来。点完添加按钮后,界面回到了RT-Thread Settings,此时按Ctrl+S保存,则会开始下载。下载过程中,控制台子窗口中可以看到一些日志输出:
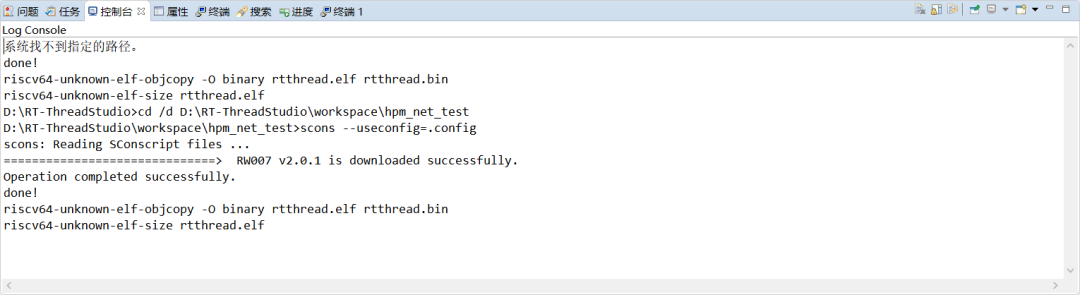
稍等片刻,可以看到控制台中间有“RW007 v2.0.1 is downloaded successfully.”输出。此时rw007软件包已经成功下载到当前项目中了,具体代码位于packages子目录下:

2.3 配置RW007驱动
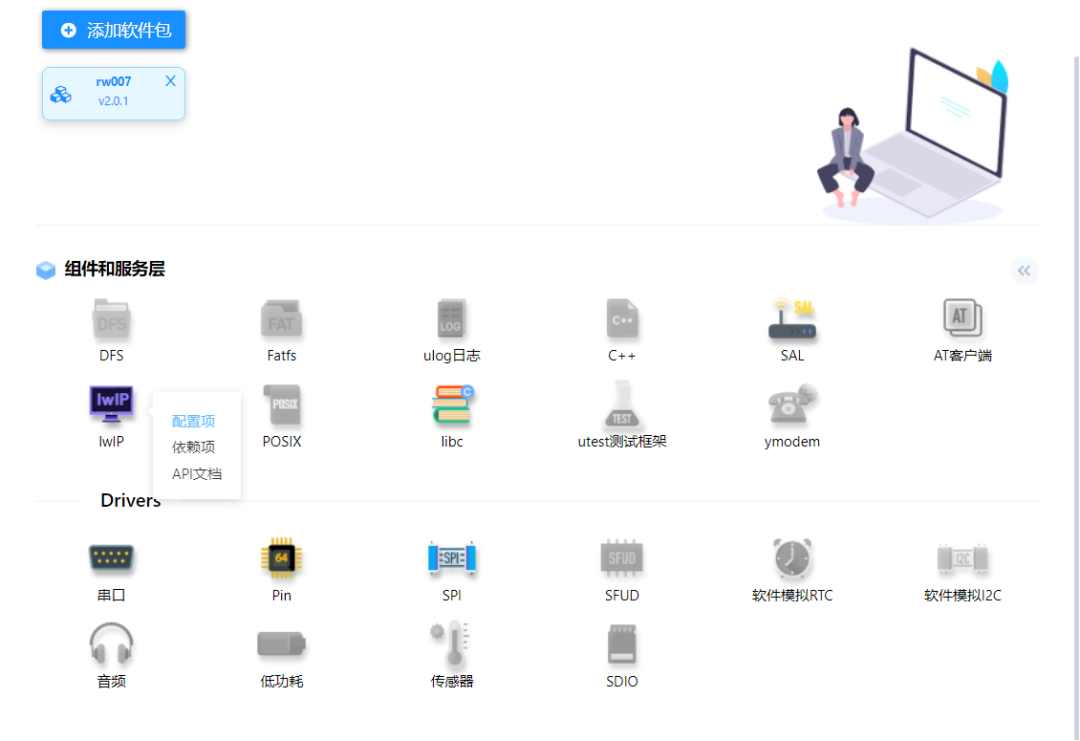
在RT-Thread Settings界面,将鼠标移动到RW007组件上,会弹出悬浮菜单:
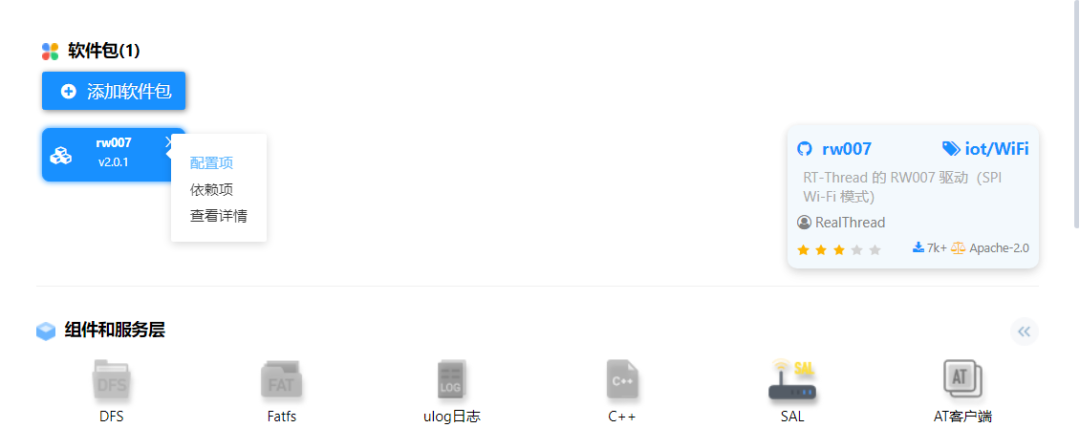
点击悬浮菜单中的“配置项”,即可进入RW007软件包的配置界面:
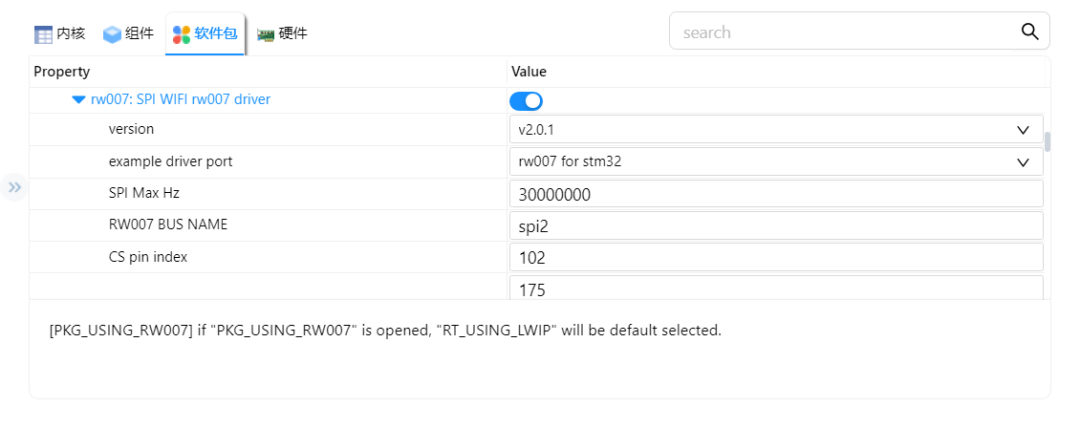
可以看到,默认有一个RW007 for stm32的配置,就是说RW007默认包含了STM32的驱动。
这里我们需要修改的就是这个example driver port配置项,点击下拉菜单改为不使用示例驱动:
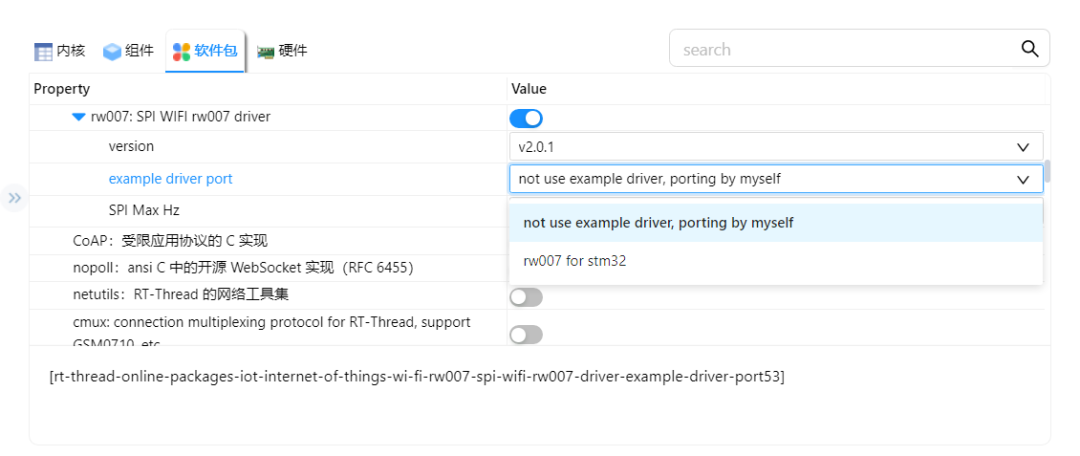
选中后,记得Ctrl+S保存配置。
2.4 编译、烧录、运行项目
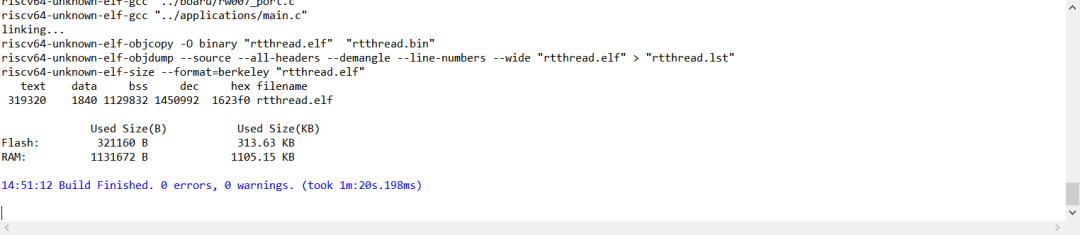
在RT-Thread Studio中按Ctrl+B快捷键或点击“锤子”图标,即可开始编译项目。编译完成后,可以看到控制台输出了RAM和Flash占用:
此时,将开发板连接到PC,并使用串口助手或者其他终端工具,连接到新增的串口上。
再到RT-Thread Studio中,按Ctrl+Alt+D快捷键或点击“下载”图标即可进行烧录(或者直接进行调试也可以)。
烧录完成后,可以看到串口终端上有输出:
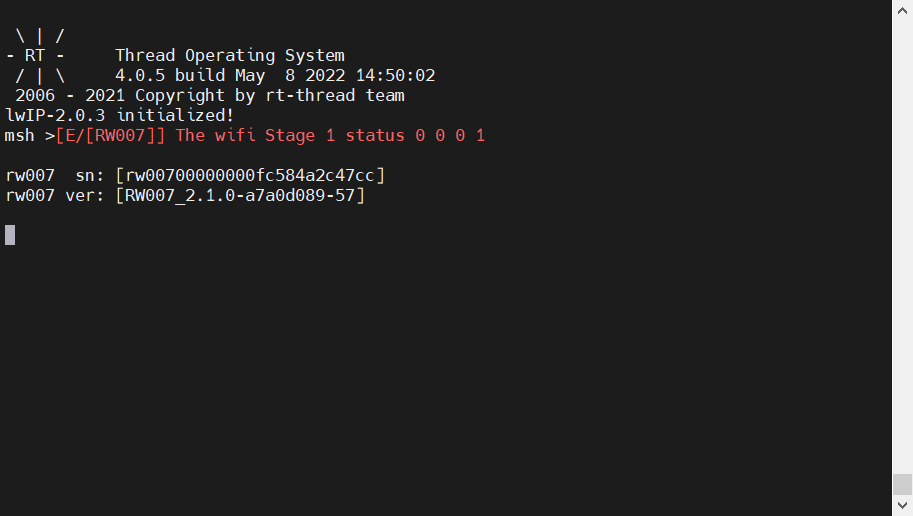
可以看到,输出了RT-Thread版本信息和RW007模组的序列号以及固件版本信息。这里能够看到RW007模组的固件版本信息,其实HPM6750芯片和RW007模组之间已经可以正常通信了。
三、WiFi测试
接下来,我们进行一些简单的WiFi测试。
添加RW007组件后,默认会打开RT-Thread的WiFi驱动框架,而RT-Thread的WiFi驱动框架中同时带有一个测试命令——wifi(对就是这么直接)。
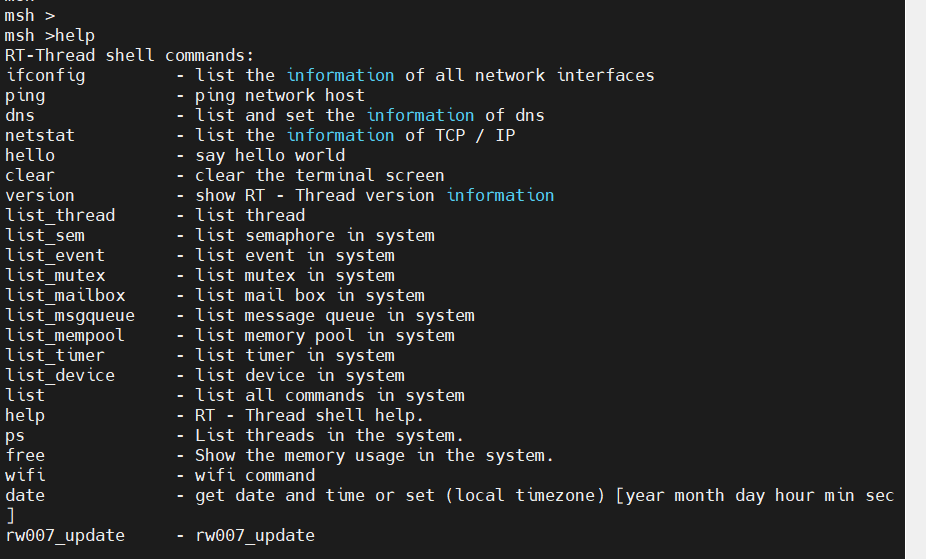
我们可以在RT-Thread的msh交互环境中使用help查看当前已有哪些命令:
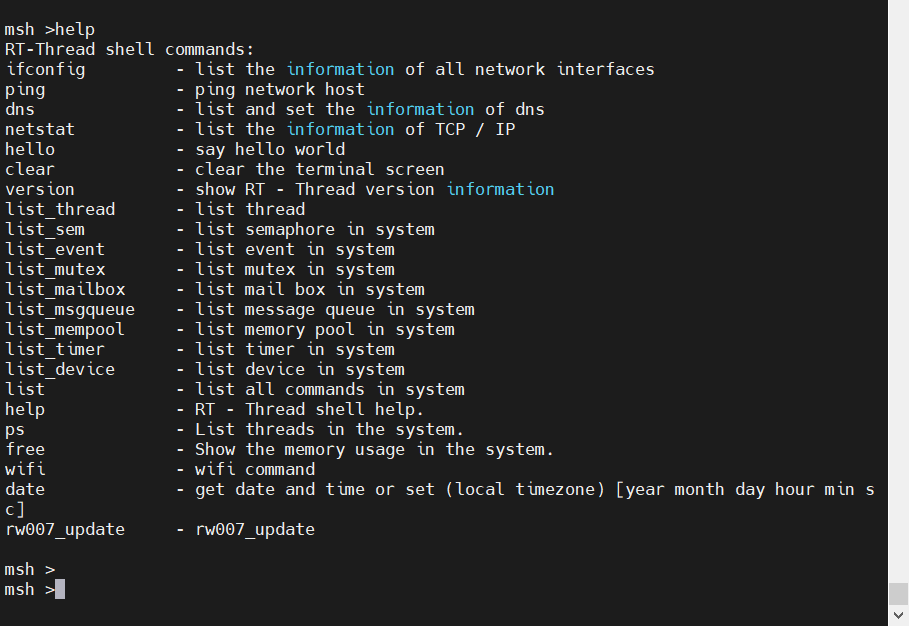
可以看到有一个wifi命令。
接下来我们查看wifi命令的使用方式:

3.1 扫描测试
尝试扫描周围的WiFi热点:
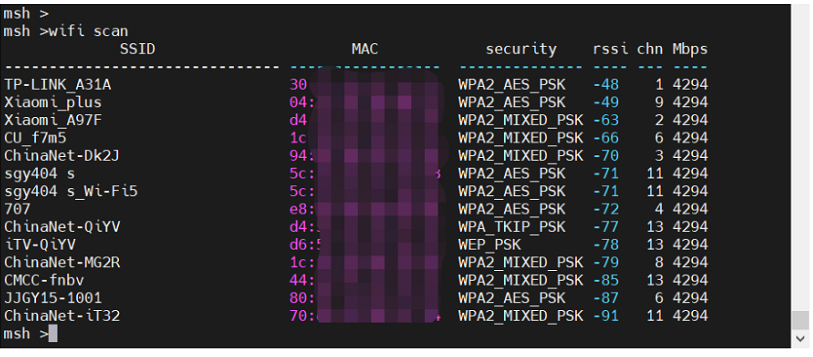
可以看到,成功扫描到了周围的WiFi热点。
3.2 连接测试
尝试连接其中的一个热点:
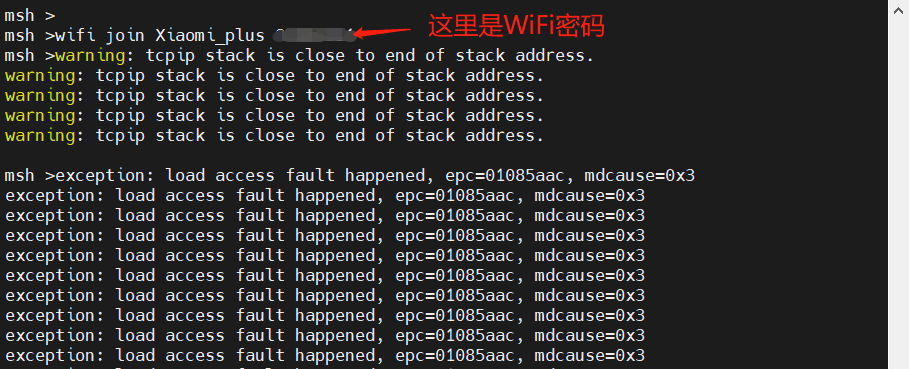
然而,不幸的是,发生异常了。
不过,从这里的几个warning打印信息可以看到,应该是因为tcpip线程栈溢出导致的。
3.3 调大tcpip线程栈大小
接下来,我们通过RT-Thread Settings修改tcpip线程栈的大小。
同样,首先打开RTT Settings界面,鼠标指针放到LwIP组件图标上:
打开配置项,找到RT_LWIP_TCPTHREAD_STACKSIZE配置项,并将其修改为4096:
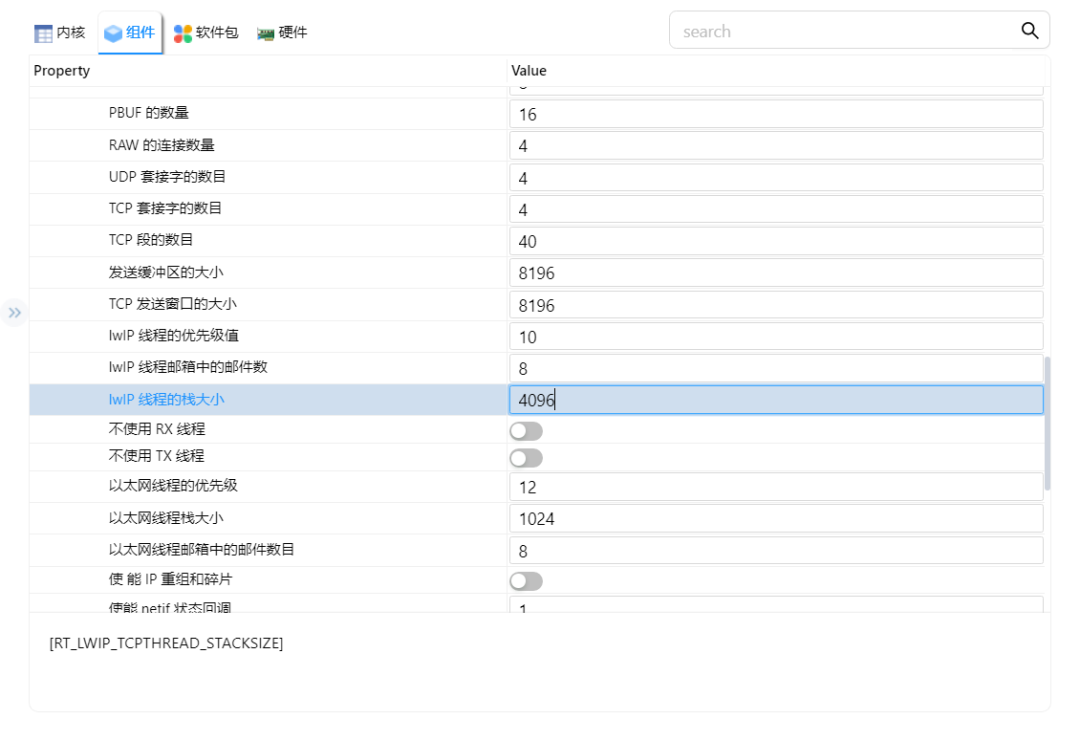
界面下方可以看到这个LwIP线程栈大小的配置项名称为RT_LWIP_TCPTHREAD_STACKSIZE。至于这里为什么要改这个配置项,没有在RT-Thread用过LwIP的同学可能会疑惑。其实,这里可以根据线程名“tcpip”,一路搜索代码,首先可以找到创建名为tcpip线程的代码位置,然后可以找到线程栈大小参数的来源。这里是搜索结果:



PS:因为默认使用的是lwip 2.0.3版本,所以这里只搜索了lwip-2.0.3的代码。
3.4 重新测试
配置修改完成后,Ctrl+S保存,重新编译项目、烧录、运行,这次能够成功连接WiFi热点了:
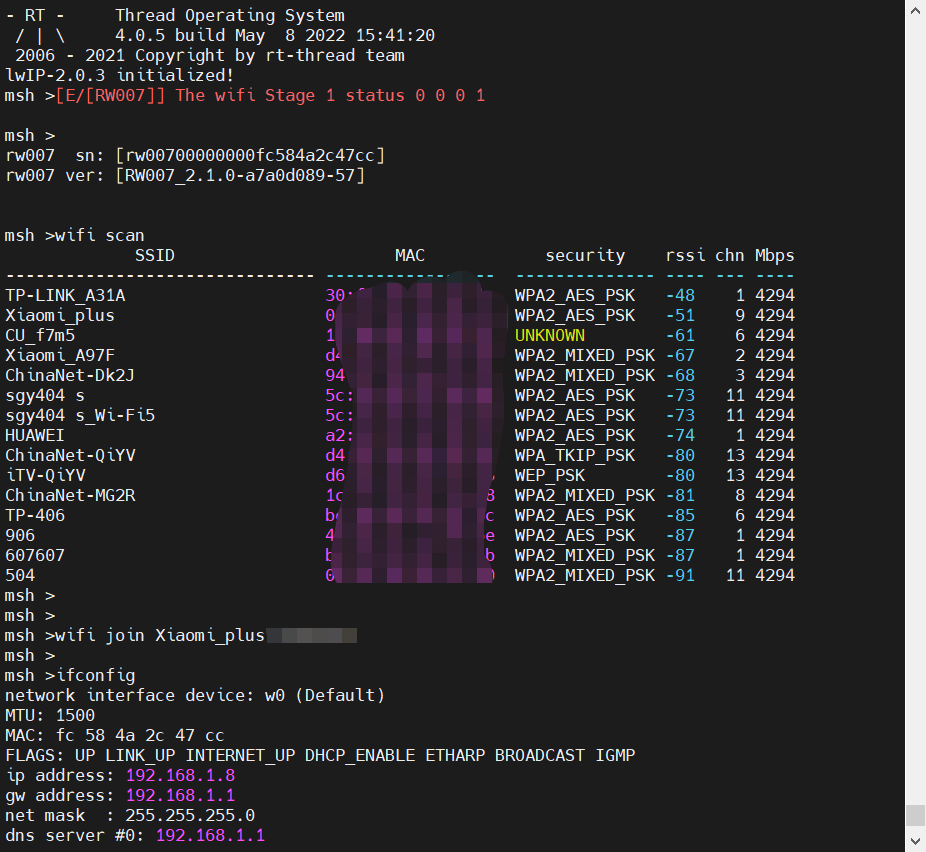
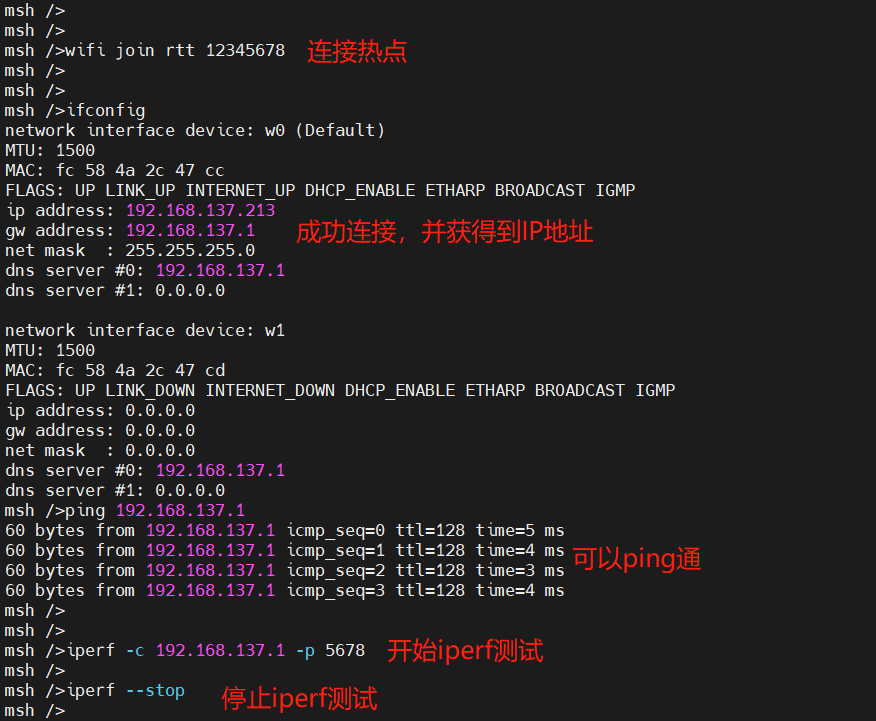
可以看到,已经成功通过DHCP从热点获取到IP地址了。
四、网络测试
4.1 RT-Thread网络组件
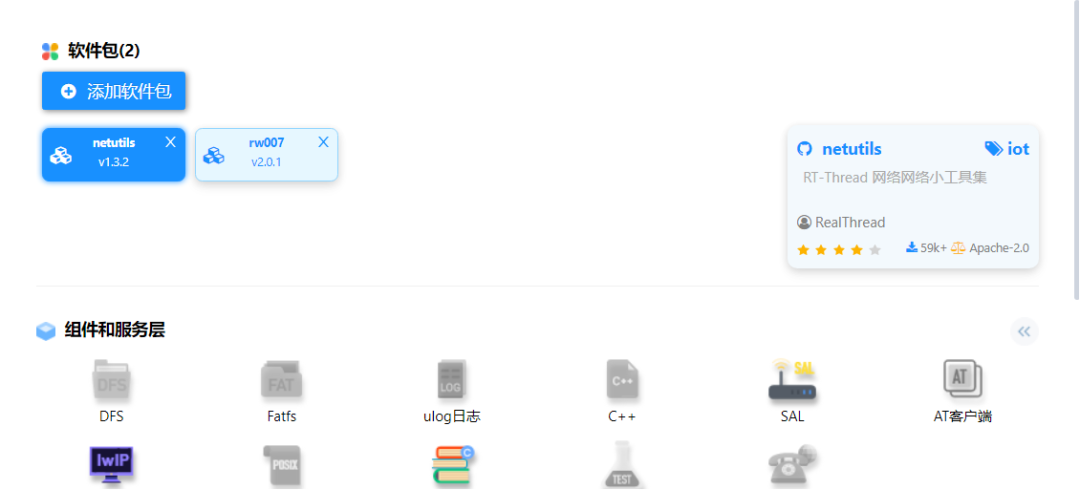
前面提到,添加了RW007软件包后,会开启RT-Thread的WiFi驱动框架;同时,也会开启系统中网络协议相关的组件,主要包括套接字抽象层(SAL)、网络接口层、轻量级TCP/IP堆栈(LwIP),如下图所示。
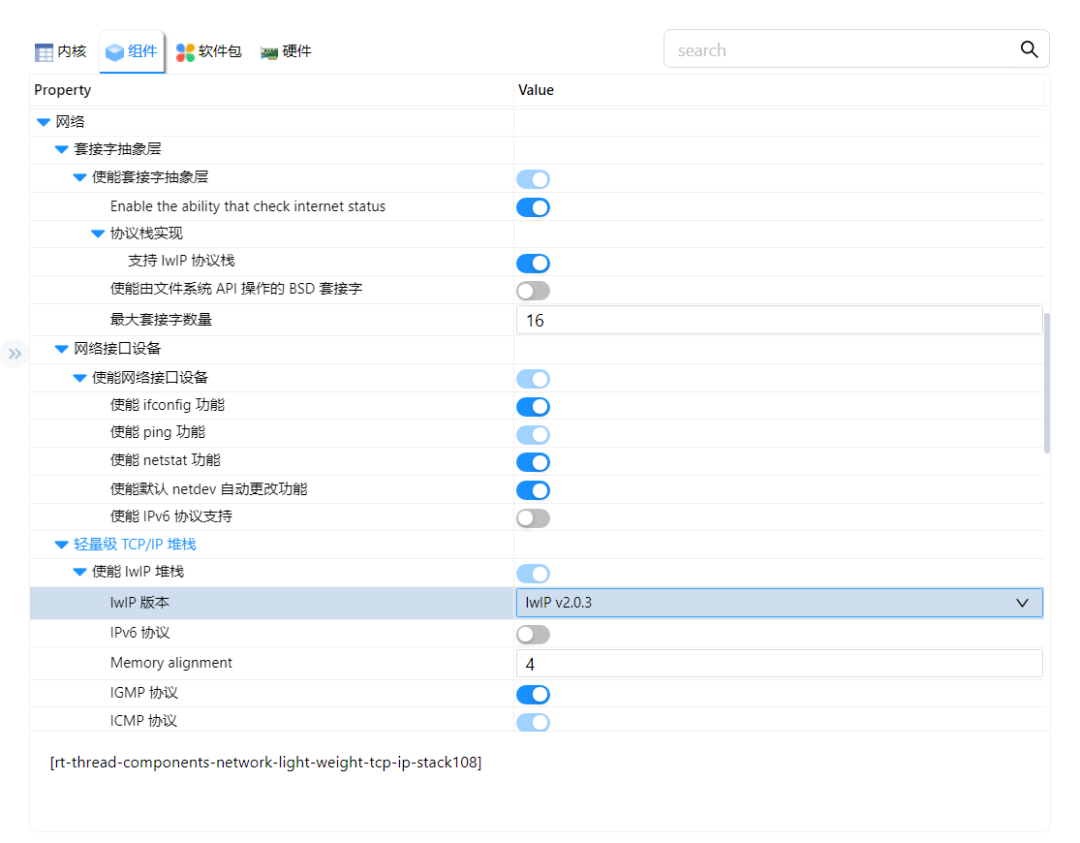
其中,LwIP的默认版本用的是v2.0.3,也可以切换为其他版本(RT-Thread系统中同时提供了LwIP的好几个版本可供选择)。
4.2 RT-Thread网络组件相关的命令
RT-Thread系统网络相关组件打开后,将会向msh中注册几个命令用于测试,具体包括:ifconfig、ping、netstat、dns等,可以在help的输出中找到:
4.3 ping测试
有IP地址了,我们可以用ping命令测试一下能不能访问baidu.com:

可以看到,能够成功ping通baidu.com了。
使用baidu.com的域名能够访问,说明DNS整个流程都是OK的,同时网路协议也是没问题的。
五、网络带宽测试
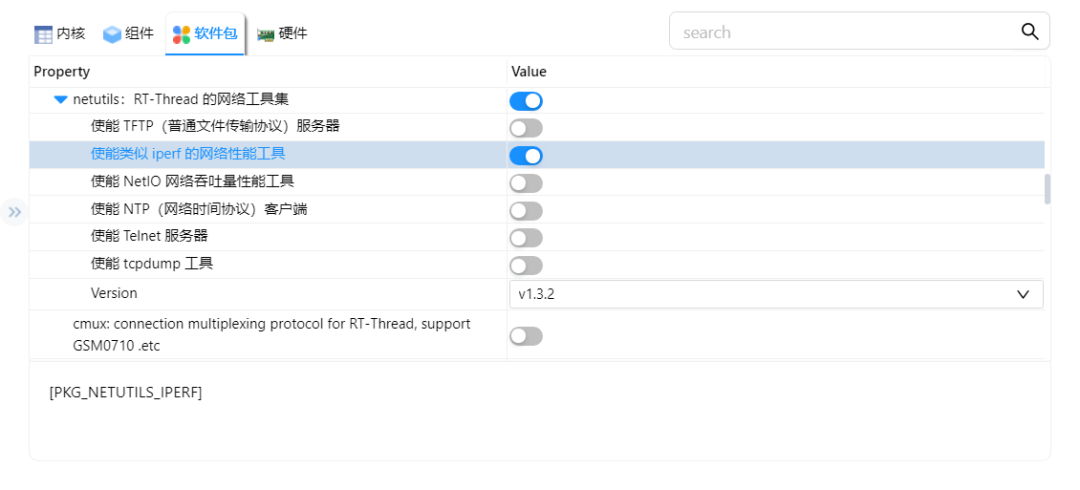
5.1 添加netutils软件包
RT-Thread的netutils软件包中提供了iperf命令,可以用于测试网络带宽;
和前面类似的方法,为项目添加netutils组件:
打开“配置项”后,打开iperf的配置项:
修改配置后,Ctrl+S保存。
重新编译、烧录、运行项目,help的输出可以看到多了iperf命令。
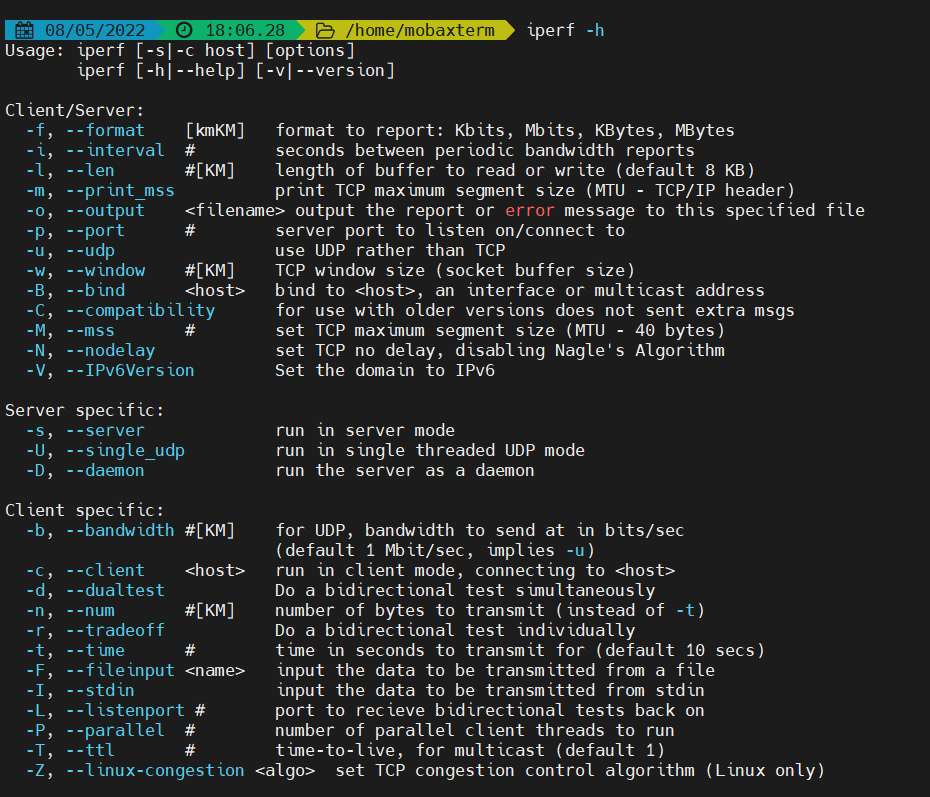
5.2 iperf命令参数
在RT-Thread的msh中运行iperf,默认输出帮助信息:

可以看到iperf的命令参数使用方法。
需要注意:
1.RT-Thread的iperf命令实现中,对参数的顺序有要求,如果使用过程中发现参数报错,需要查看源码定位原因;
2.RT-Thread的iperf不支持持续时间选项,一般是先启动,后通过stop选项停止的方式控制测试时长;
5.3 PC端的iperf
PC端的iperf可以到iperf项目官网下载:https://iperf.fr/iperf-download.php
我使用的mobaxterm,里面自带了iperf命令,所以就不单独下载了:
5.4 进行iperf测试
进行iperf测试之前,需要注意:
1.最好用PC创建热点,用无线路由器也行,但是需要确保信号强度足够;
2.确保开发板和PC直线的距离不要太远,否则WiFi信号较弱,测试的结果可能会偏小;
3.最好在WiFi热点较少的环境下进行测试,否则测出的结果数据也会偏小;
下面进行测试,测试步骤如下:
在PC上,创建热点,例如名为rtt,密码为12345678
在PC上,启动iperf服务端:iperf -s -p 5678
在PC上,使用ipconfig/ifconfig命令查看热点的IP地址,例如我在Win10上创建的热点,IP地址是:192.168.137.1
在开发板上,连接PC启动热点:wifi join rtt 12345678
5.在开发板上,查看IP地址是否已成功分配:ifconfig,另外,可以通过ping命令测试开发板和PC直接IP是否可达
6.在开发板上,启动iperf客户端:iperf -c 192.168.137.1 -p 5678
启动后,可以通过ps命令查看正在运行的线程
7.一段时间后,在开发板上,停止iperf客户端:iperf —stop
8.开发板上iperf停止后,PC端应该可以看到iperf的输出;
开发板上整个过程的输出如下:
PC端输出:
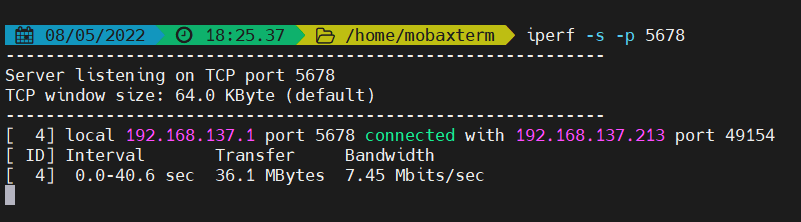
可以看到带宽为7.45Mbps
5.5 iperf测试小结
实际上,影响WiFi带宽测试结果数据的因素很多。我们这里,其中,起决定性的的主要由以下几个方面:
RW007模组本身支持的最高WiFi传输速率;
RW007模组的SPI接口支持的最高工作频率;
HPM6750 SPI接口最高支持的工作频率;
热点(PC或路由器)的WiFi最高传输速率;
各种环境因素,例如开发板和PC直接的距离、环境是否有其他热点干扰等等;
六、业务代码——socket测试
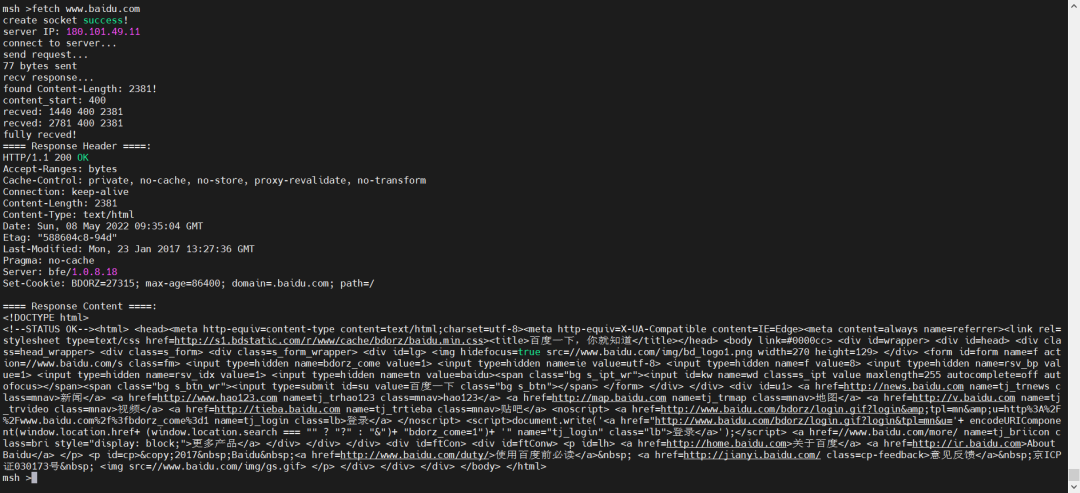
前面的ping测试、iperf测试使用的是系统已有组件或软件包。除此之外,也可以通过socket连接网络。这里以一个简单的使用socket获取baidu首页为例(直接使用web_client软件包也可以实现该功能):
#include #include #include #include #define DEFAULT_HOST "example.com"#define DEFAULT_PORT 80#define CONTENT_LENGTH "Content-Length:"#define HEADER_END_MARK "\\r\\n\\r\\n"uint32_t get_host_addr(const char *host){ uint32_t dest = 0; struct hostent *he; he = gethostbyname(host); if (he && he->h_addr_list && he->h_addr_list[0]) { dest = ((struct in_addr *)(he->h_addr_list[0]))->s_addr; } return dest;}#define close(fd) closesocket(fd)int fetch(int argc, char* argv[]){ char* host = DEFAULT_HOST; int port = DEFAULT_PORT; int sockfd = -1; int retval = 0; int recved = 0; int content_start = 0; int content_length = 0; struct sockaddr_in server_addr = {0}; static char request[256]; static char response[4096]; if (argc > 1) host = argv[1]; if (argc > 2) port = atoi(argv[2]); sockfd = socket(AF_INET, SOCK_STREAM, 0); if (sockfd < 0) { rt_kprintf("create socket failed!\\n"); return -1; } rt_kprintf("create socket success!\\n"); rt_memset(&server_addr, 0, sizeof(server_addr)); server_addr.sin_family = AF_INET; server_addr.sin_port = htons(port); server_addr.sin_addr.s_addr = get_host_addr(host); // IP转为 “点分十进制” 格式 inet_ntop(AF_INET, &server_addr.sin_addr, response, sizeof(response)); rt_kprintf("server IP: %s\\n", response); rt_kprintf("connect to server...\\n"); retval = connect(sockfd, (const struct sockaddr *)&server_addr, sizeof(server_addr)); if (retval < 0) { rt_kprintf("connect failed!\\n"); close(sockfd); return -1; } rt_snprintf(request, sizeof(request), "GET / HTTP/1.1\\r\\n" "Host: %s\\r\\n" "User-Agent: curl/7.81.0\\r\\n" "Accept: */*\\r\\n" "\\r\\n", host); rt_kprintf("send request...\\n"); retval = send(sockfd, request, rt_strlen(request), 0); if (retval < 0) { rt_kprintf("send failed!\\n"); close(sockfd); return -1; } rt_kprintf("%d bytes sent\\n", retval); rt_kprintf("recv response...\\n"); recved = 0; while ((retval = recv(sockfd, &response[recved], sizeof(response) - recved, 0)) > 0) { if (content_length == 0) { char* content_length_pos = rt_strstr(response, CONTENT_LENGTH); if (content_length_pos) { content_length = atoi(content_length_pos + rt_strlen(CONTENT_LENGTH)); rt_kprintf("found %s %d!\\n", CONTENT_LENGTH, content_length); } } if (content_start == 0) { char* header_end = rt_strstr(response, HEADER_END_MARK); if (header_end) { content_start = header_end + rt_strlen(HEADER_END_MARK) - response; rt_kprintf("content_start: %d\\n", content_start); } } recved += retval; rt_kprintf("recved: %d %d %d\\n", recved, content_start, content_length); if (content_length && content_start && recved - content_start >= content_length) { rt_kprintf("fully recved!\\n"); break; } } response[recved] = '\\0'; rt_kprintf("==== Response Header ====:\\n"); for (int i = 0; i < content_start; i++) { rt_kprintf("%c", response[i]); } rt_kprintf("==== Response Content ====:\\n"); for (int i = content_start; i < recved; i++) { rt_kprintf("%c", response[i]); } if (retval < 0) { rt_kprintf("recv failed!\\n"); close(sockfd); return -1; } shutdown(sockfd, SHUT_RDWR); close(sockfd); return 0;}MSH_CMD_EXPORT(fetch, "fetch home page of a site");
这是一段使用裸socket实现的简单HTTP客户端,依次进行了请求发送、回复接收和回复解析的过程,测试结果:
七、原理简介
以上操作,我们没有任何底层驱动相关代码,就实现了通过HPM6750EVKMINI开发板的RW007 WiFi模组实现联网功能。这是因为我们基于RT-Thread的项目中,从底到上已经有了:
HPM6750EVKIMNI BSP中包含了SPI驱动(libraries/drivers/drv_spi.c文件);
默认打开了spi1的编译配置;
HPM6750EVKIMNI BSP中包含了网卡初始化代码(board/rw007_port.c文件);
向系统注册了启动时自动执行的wifi_spi_device_init函数;
wifi_spi_device_init函数内部会调用rw007软件包中的rt_hw_wifi_init函数;
RW007软件包,包含RW007模组的驱动代码;
底层使用SPI驱动实现主控和RW007模组之间的通讯;
上层向RT-Thread系统注册WLAN设备(rt_hw_wifi_init函数内部会调用rt_wlan_dev_register函数);
RT-Thread的WiFi(也叫WLAN)驱动框架;
对下连接具体的 WIFI 驱动,控制 WIFI 的连接断开,扫描等操作。
对上承载不同的应用,为应用提供 WIFI 控制,事件,数据导流等操作,为上层提供统一的 WIFI 控制接口。
RT-Thread的Socket抽象层(SAL),统一几种不同的socket实现;
RT-Thread的TCP/IP协议栈(LwIP),具体的TCP/IP协议实现;
(文章摘选自RTT @xusiwei1236)
-
WIFI
+关注
关注
81文章
5295浏览量
203555 -
RTThread
+关注
关注
8文章
132浏览量
40858
发布评论请先 登录
相关推荐
tlv320aic3100芯片播放不正常怎么解决?
如何做一个hpm6750evk2的bootloader?
HPM6750 Bootloader设计
HPM6750evkmini如何实现可信的执行环境?
两分钟带你了解步进电机控制的方法





 工商网监
工商网监
评论