 爱普特32位MCU微控制器APT32F1023H8S6用于扫地机器人
爱普特32位MCU微控制器APT32F1023H8S6用于扫地机器人
扫地机器人的系统组成构架如下图,它主要由数据采集单元、处理运算单元、执行单元和电源管理单元四部分组成。
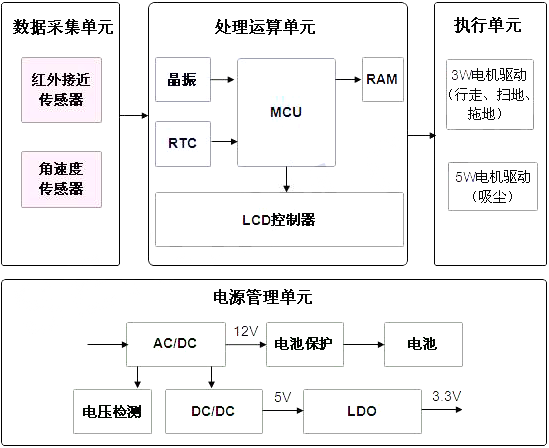
扫地机器人的系统组成构架
扫地机器人的四个组成部分中最主要的就是处理运算单元,这一单元主要完成传感器检测、路径规划、驱动控制和人机互动等主要工作,它是整个设备的核心部分,这一部分的性能好坏决定了扫地机器人的品质。
因此,按照以下这三个方面去选择合适的微控制器很有必要:
1)用于扫地机器人的微控制器要实时的与数据采集单元、执行单元进行通讯,同时要快速的进行路径规划,所以要求微控制器具有高运行速度和数据处理能力。
2)用于扫地机器人的微控制器要有丰富的人机接口,便于人机互动。所以要求微控制器具丰富的GPIO及UART等外设。
3)扫地机器人工作时是使用电池供电的,所以微控制器要有低功耗的特点。
结合以上特点,本文推荐爱普特的C-Sky 32位CPU内核的APT32F1023系列MCU APT32F1023H8S6。
首先,APT32F1023H8S6微控制器的最高工作频率可以达到48MHz,HWD硬件除法器进行快速的数据处理,可以满足扫地机器人路线规划算法处理,位置处理及执行控制等需求。
其次,APT32F1023H8S6在人机交互上具有更多的优势,扫地机器人的人机交互主要由按键与显示部分组成,APT32F1023H8S6有多达22个GPIO,芯片内支持17个扫描通道,可用于实现电容式触摸按键,相较于传统方案中的机械按键或薄膜按键来说,电容式触摸按键更耐用,手感更好。另外,APT32F1023H8S6还集成多个UART、I2C、SPI等接口,可以方便实现其它的人机显示接口。
APT32F1023H8S6采用的是低功耗工艺,芯片各功能模块对低功耗做了极大优化,非常适合扫地机器人这种电池供电的设备使用。芯片内部集成有灵活的能耗管理系统,可控制芯片工作在活动、休眠、深度休眠、停机和关断6种不同的功耗模式下。而且多数的外设模块可以深度休眠甚至停机模式下工作,即可以降低系统的功耗又可以保证系统的正常工作。
在设计软件时我们可以依据所使用的功能模块的特点,让CPU工作在不同的能耗模式下,实现应用实际电流的最优化。
概括来说,APT32F1023H8S6是一款低功耗、高集成密度的32位MCU,它非常适合扫地机器人这类电池供电、要求高速运算能力的应用。
APT32F1023H8S6其他特点:
•64KB Flash
•4KB RAM
•定时器
--2个16位定时器
--1个低功耗16位定时器
--1个32位超低功耗定时器
--1个32位的RTC
--1个16位脉冲计数器
--1个看门狗定时器
--16个32位通用寄存器
•12位1MSPS转换速度的ADC
•工作电压1.8V~5.5V
•工作温度范围40℃~85℃
•封装:SSOP24SOP24SOP20QFN20
-
扫地机器人
+关注
关注
20文章
789浏览量
53479
发布评论请先 登录
相关推荐
恩智浦i.MX RT1052跨界MCU在扫地机器人中的应用

智能扫地机器人的工作原理和构成
霍尔元件在扫地机器人中的应用
扫地机器人应用解决方案
霍尔开关在扫地机器人中的应用
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
光耦知识分享‖探讨光耦技术在扫地机器人的应用

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
爱普特再推超高性价比全国产32位MCU—APT32F1025B

扫地机器人CCC认证申请流程与其他产品的区别是什么?






 工商网监
工商网监
评论