 ADAS DV&PV试验测试台架的方案分享
ADAS DV&PV试验测试台架的方案分享
为了在当下高速发展的自动驾驶中始终保持产品核心竞争力,各厂商皆迫切持续改进现有产品并迭代新兴技术,而快速的产品迭代并量产容易导致产品问题频出,进而引发现场故障、高昂售后、产品召回、品牌危机等问题。
设计验证试验(DV-Design Verification)及产品验证试验(PV-Product Validation)是一种有效的工程手段来尽量消除潜在失效模式出现在未来产品中,并确保产品的功能、性能、可靠性、稳定性符合产品设计预期及客户需求;而高效的DV&PV自动化试验测试台架方案将有助于测试开展、异常捕捉、故障检查及问题分析,持续缩短产品开发、改进及验证周期,以确保产品交付时间及品质。
1、DV&PV试验需求
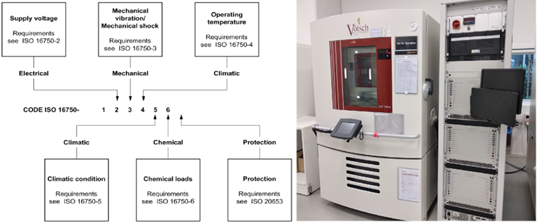
DV&PV试验测试要求根据产品特性及试验标准(ISO-16750),在机械、电器、环境、化学等试验条件下开展多个被测件(DUT)的环境可靠性试验及电气性能试验;自动化试验测试台架则为上述试验的开展提供全生命周期、高稳定性的电气模拟、实时状态监控、过程数据记录及测试报告生成等功能。
2、自动化试验测试台架技术方案
2.1自动化试验测试台架系统框架
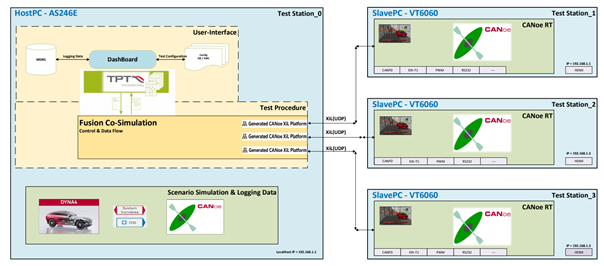
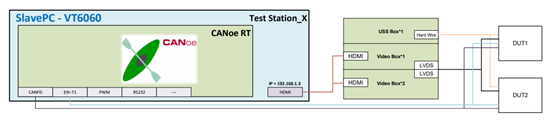
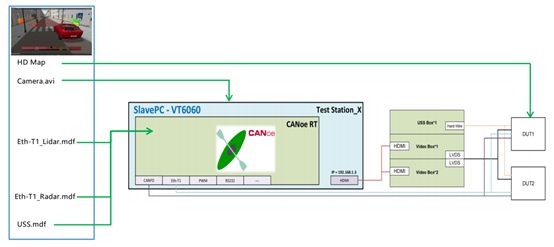
DV&PV自动化试验测试台架(LTT-Life Time Tester)主要由用户交互界面GUI、测试策略管理软件TPT及分布式CANoe RT从机构成;测试策略管理软件TPT、车辆及场景仿真软件DYNA4、RT系统配置工具CANoe皆运行在Host PC中,其中用户交互界面GUI负责测试系统上位机的信息显示及测试操作功能,而分布式CANoe RT从机实现对VT system设备的调用和网络通讯的仿真;TPT作为测试策略管理软件,则完成对Dashboard GUI及CANoe RT从机资源及接口的统一管理,并通过其FUSION Co-Simulation机制完成多DUT的并行测试。
2.2测试策略管理软件TPT
TPT支持汽车电子主流的工具链来覆盖产品开发的整个V模式(MiL、SiL、PiL、HiL、ViL)下所有的测试阶段,并以图形化建立状态机形式的测试用例,复用度高而无需更换测试工具。其强大的Fusion Platform使用户可以轻松创建包含不同组件的仿真环境,以实现对多节点交互控制及联合仿真;仿真节点类型涵盖了CANoe Node、 dSPACE HiL Node、INCA Client Node、Speedgoat Node及Custom Node DLL等。
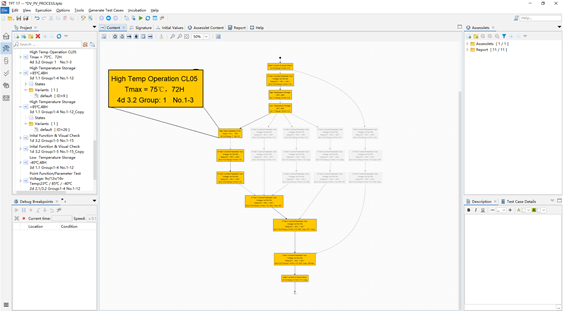
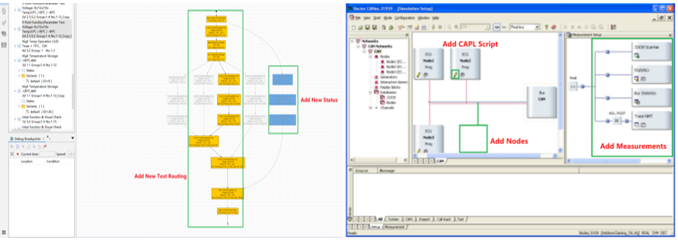
》状态机定义测试验证运行模式及试验流程:
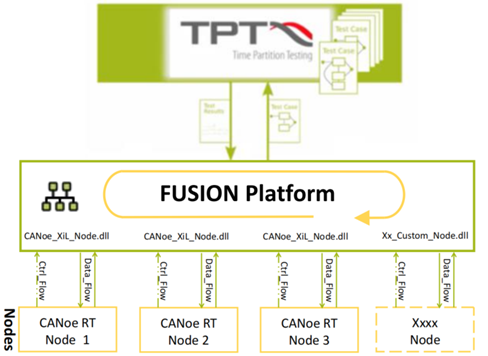
》FUSION Platform多节点支持与Multi CANoe接合以实现多个ADAS控制器的并行测试:
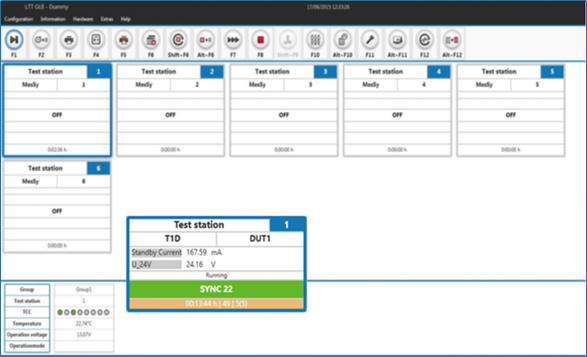
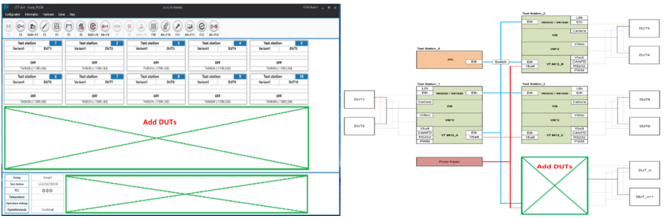
》独立测试平台Dashboard定制开发适应于试验监控的GUI,其具备运行模式配置(F11)、工作模式切换(F1/F8)、DUT通道配置(F7)、运行状态显示、异常提示、故障码查询、数据库更新及测试报告生成等功能:
2.3 LTT系统硬件框架
ADAS控制器的LIDAR、RADAR、USS等传感器信号及CAN FD、Ethernet等通信接口都采用Vector VT system对应功能板卡进行适配,外设激励信号最终通过各端口I/O注入到DUT中。
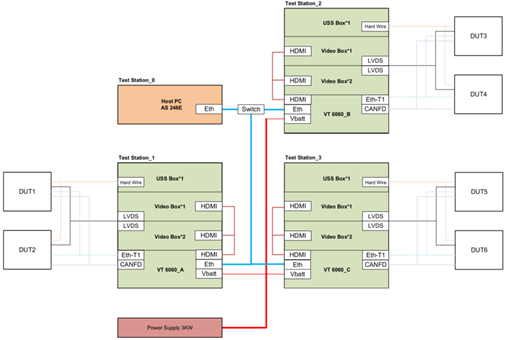
可选用CANoe RT实时从机板卡VT6060、车载以太网通讯板卡VT6306、CAN FD通讯板卡VT6104A、通用数字I/O板卡VT2848等功能模块进行差异化配置以适应ADAS控制的所有外部传感器及网络通信需求。
2.4 ADAS传感器数据采集及回灌
DV&PV试验中ADAS控制器需要其工作在特定的场景以验证其所有外设接口、信号处理电路及SOC算力耐久稳定性;而在Vector DYNA4中可自由创建车辆及外部环境仿真模型以验证自动驾驶的特定应用场景,并通过配置Camera、LIDAR、RADAR、USS等参数以生成与场景关联的各种传感器数据;最后通过ASAM OSI及MDF的方式输出场景数据,以便进行分布式多DUT的数据回灌。
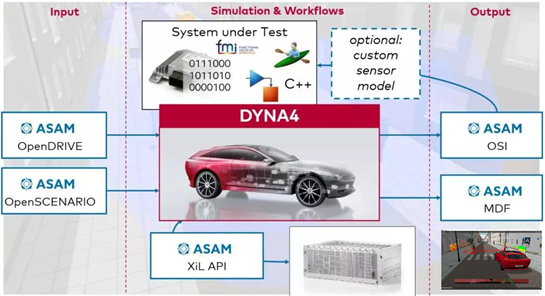
通过多从机中CANoe RT及视频回播可将携带指定仿真场景的OSI及MDF格式的数据回灌入ADAS控制器中,以满足在特定工作模式及试验场景下功能、性能、可靠性及稳定性的验证。
2.5 LTT方案拓展性
》扩展多DUT(6+)并行测试
实施DV&PV试验中,需灵活配置1~6个DUT及多于6个DUT进行同时验证,而Dashboard GUI及分布式CANoe RT框架在系统软、硬件框架上皆可进行弹性配置,以满足多样化的测试验证需求。
》扩展单DUT功能(VT板卡)
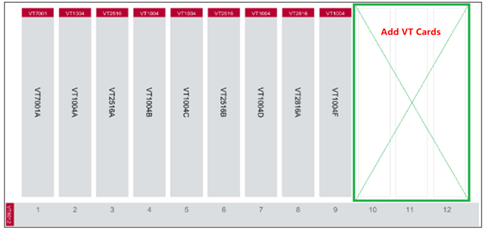
分布式CANoe RT从机采用Vector VT system方案,其中实时机VT6060可通过USB接口外挂VN1600&VN5000网络设备,而VT8012机箱可插入VT各功能板卡(VT2848 Digital I/O Modules、VT2816 Analog I/O Modules、VT2004 Stimulation Modules、VT2832 Switch Matrix Module等),从而以增加各类型信号端口及模拟负载。
》扩展TPT状态机模式&CANoe仿真程序
TPT状态机模式可以支持用户根据试验需求进行自定义开发,自主添加测试工作模式及自由组合测试流程;同时CANoe仿真软件支持仿真节点、CAPL程序的自适应开发,其测量分析功能便于功能测试及问题分析。
3、总结
本文简要介绍了ADAS控制器在DV&PV试验中自动化测试台架(LTT)的技术方案,从系统软、硬件方面说明技术方案的平台性、实用性;整个方案采用全栈测试策略管理软件TPT、车辆及环境场景仿真软件DYNA4、测试仿真软件CANoe及VT system硬件系统,保证了自动化测试台架在DV&PV全生命周期验证中的可靠性、稳定性及可扩展性,从而将试验验证重心放在ADAS产品本身中以加速迭代周期及品质提升。
参考文献
1. ISO 16750-1:2018 Road vehicles-Environmental conditions and testing for electrical and electronic equipment
2. IEC 60068-1:2013 Environmental testing - Part 1: General and guidance
3. ADAS-HIL_System-Information.pdf
文中部分内容参考于Vector/PikeTec
-
adas
+关注
关注
310文章
2208浏览量
209125
发布评论请先 登录
相关推荐
双模载波芯片CN8513&CN8514在智能家居中的创新应用

如何判断产品需不需要做AT&amp;amp;T认证?AT&amp;amp;T测试内容和要求分享

北美运营商AT&amp;amp;T认证中的VoLTE测试项
北美运营商AT&amp;amp;T认证的测试内容有哪些?

北美运营商AT&amp;amp;T认证的费用受哪些因素影响

onsemi LV/MV MOSFET 产品介绍 &amp;amp; 行业应用

基于 onsemi NCV78343 &amp;amp; NCV78964的汽车矩阵式大灯方案

电动汽车充电桩测试台架的相关介绍

FS201资料(pcb &amp; DEMO &amp; 原理图)
北美运营商AT&amp;amp;T认证入库产品范围名单相关
解读北美运营商,AT&amp;amp;T的认证分类与认证内容分享
利尔达NB-IoT &amp;amp;Cat.1 产测应用指导






 工商网监
工商网监
评论