 ARM工业平板在机器人示教器控制系统的应用
ARM工业平板在机器人示教器控制系统的应用
工业机器人系统主要由机器人(机械手)本体、机器人控制器、示教器等组成。那么,示教器是什么?
示教器简称TP,它是用户与机器人之间相互交流的重要装置。用户可以通过操作示教器来查看机器人当前位置、寄存器数据、IO分配情况、点动机器人、创建程序、编写机器人、对程序进行调试以及让机器人投入生产。
示教器的优势特点
一、对非协作型工业机器人进行编程,需要使用失能开关。这是一种在操作者失去行为能力,诸如死亡、失去意识或者离开控制设备时,能自动动作的开关。它一般作为失效安全的一种形式,停止机器以避免可能发生的危险。示教器使用户能够通过使用钥匙将机器人的操作模式从示教模式和无限制操作之间相互切换,从而控制失能开关。
对协作型机器人,也有一些紧急情况需要机器人自行停止工作。示教器有确保安全的保护性停机的作用。所有系统都有可能出现故障,所以操作员需要有能力控制机器人并将其行为模式切换到安全模式,以便人身进入工作单元或将机器人移至任何所需位置。示教器就是执行这些操作的最有效工具。
二、可以用来监控机器人和工作单元中的所有设备是否存在行为错误并报警,更甚者可以判断机器人可能的行为错误。在程序运行时,示教器是了解机器人操作以及整个程序控制位置的窗口。
三、测试机器人新程序的好工具和好方法,而且方便快捷。与OLRP相比,示教器可以更快更便捷地完成一些简单编程任务。例如,机器人的拉伸,拾取和放置,直线焊接和点胶等的编程。这些操作非常简单,需要迅速完成,特别是在高复杂度,小批量的生产环境中,以减少切换时间的影响。在此测试期间,操作员检查机器人与工作单元中的硬件(例如机床)之间的间隙。使用示教器执行的其他测试活动包括示教基本框架和工具框架,操作员可以缓慢运行机器人以确认其如何在工作单元中移动,还可以验证工作单元中机器人及其工装工具的作用范围。
四、可以对机器人程序进行实时调整,在工作当中,机器人可能会因为各种原因错误地沿一个方向漂移一定距离,从而导致精度降低,常见问题是机械臂末端工具(End of Arm Tooling, EOAT)对齐不正确或无法到达零件,示教器的程序实时调整功能能够起到补偿的作用。
由此可见,机器人示教器需要具备显示、触摸、控制这几项功能,控制系统作为机器人的大脑,是决定机器人功能和性能的主要因素,目前工业机器人的控制器多采用控制柜的形式。工业机器人控制柜内的标准硬件主要有控制模块,其主要包含控制操纵器动作的主要计算机,包括RAPID的执行和信号处理。
由此可以看到,工业一体机就是充当工业机器人的控制系统中操作计算机的角色。作为控制系统中主要的触控设备,根据生产线长时间运行的特点,对工业一体机业的性能要求也更高。
凭借多年行业经验,微智达发现在工业机器人解决方案中,用户对工业一体机具有编程简单、一对多控制、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点有更大的需求。关于这些需求微智达工业一体机都能为用户一一解决。
工业机器人示教器对工业一体机的要求:
1)外形上,基于示教器需要方便携带移动的特点,微智达工业一体机采用无壳结构设计,机身轻薄嵌入到示教器壳体,从而减少设备厚度与重量,不仅外形美观更便于携带;
2)三星4418处理器,采用以高安全、高稳定着称的Linux操作系统,其严格的权限机制让它的安全性要比Windows更胜一筹,机器人多应用在工业环境,对安全性与稳定性要求更高;
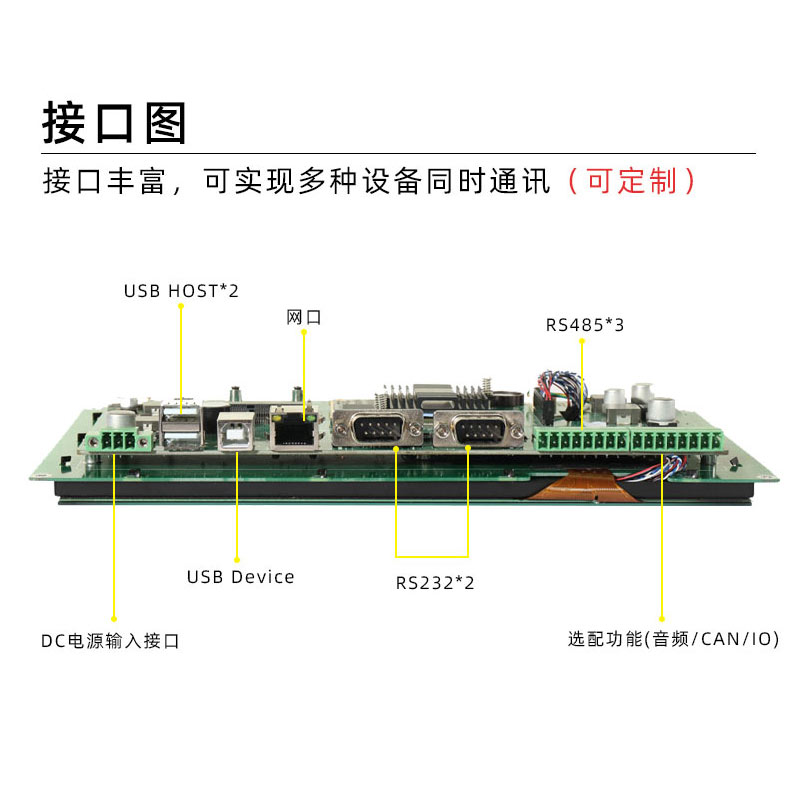
3)在接口上,集成WiFi/蓝牙/网口/4G/USB/串口/IO等接口,可实现连接PLC实现机械手控制的工作原理以及其他各种外接模块。
随着工业4.0及中国制造2025等概念的持续推进,中国工业机器人产业得到了较好的发展。随未来在传统制造业领域将陆续部署大量的工业机器人,并且由于制造业转型与升级,政府扶持力度不断加码。2018-2023年工业机器人研发及生产市场行情监测及投资可行性研究报告表明,国内外经济环境的变化倒逼产业转型升级,制造业向高端发展是必经之路。为了更好地适应市场经济的发展,需要利用机器人技术提升我国工业发展水平,完成从制造业大国向制造业强国的转变。这也将意味着,工业一体机在工业机器人控制系统解决方案中,也将蕴涵这巨大的市场潜力。
-
ARM
+关注
关注
134文章
9203浏览量
370882
发布评论请先 登录
相关推荐
智能拖动示教喷涂机器人:技术革新与未来展望


焊接机器人示教模式怎么设置






 工商网监
工商网监
评论