 航芯通用MCU技术常见问题 | F4专题
航芯通用MCU技术常见问题 | F4专题
航芯“通用MCU技术常见问题”上线啦!
航芯“通用MCU技术常见问题”专题持续更新中!本文将介绍F4专题,如对产品有其他疑问,欢迎加入航芯MCU技术交流群共同探讨!
F4专题 - 工具篇
1
1.1 Keil-Debug 工具
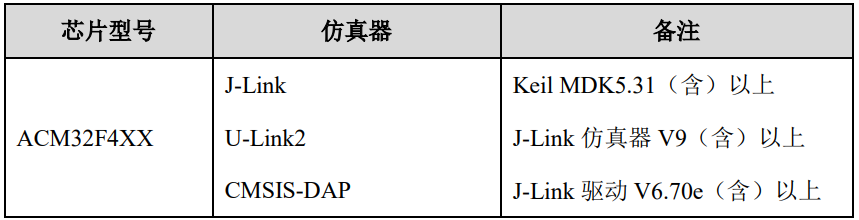
ACM32F4XX 系列支持的在线仿真器包括:J-Link-V9(含)以上、U-Link2、CMSIS-DAP等,使用 J-Link 在线调试时,Keil 推荐在 MDK5.31(含)以上,J-Link 驱动建议在 V6.70e(含)以上。
1.2 Keil-Pack 支持包
ACM32F4XX 系列提供 PACK 支持包,详细信息如下表:

1.3 Keil 工程编译失败或 F12 无法跳转
请确认工程文件目录没有中文名称。
2
IAR
2.1 IAR-Debug 工具
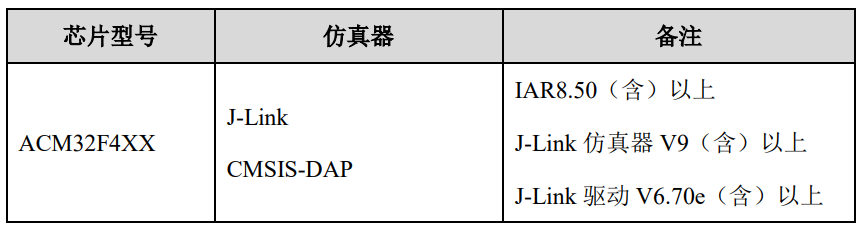
ACM32F4XX 系列支持的在线仿真器包括:J-Link-V9(含)以上、CMSIS-DAP 等,使用 J-Link 在线调试时,IAR 推荐在 IAR8.50(含)以上,J-Link 驱动建议在 V6.70e(含)以上。
1.2 IAR-Pack 支持包
ACM32F4XX 系列提供 PACK 支持包,详细信息如下表:

3
开发板仿真调试
ACM32F4XX 系列开发板自带 CMSIS-DAP 在线仿真器,用户使用时可直接使用 USB 连接线将开发板 LinkUSB 端口与 PC 端的 USB 接口直接连接,WIN7 需要安装 SDK 中的USB 驱动(AisinoChipCDC.inf),WIN7 以上系统免驱。
4
开发板串口调试
ACM32F4XX 系列开发板自带串口调试芯片,与 CMSIS-DAP 为同一个 USB 接口,连接 PC 端后需要安装 USB 转串口驱动(AisinoChipCDC.inf),此时设备管理器显示设备名称:AisinoChip Virtual Com Port,该虚拟串口主要有两个功能:
1.作为串口下载 MCU 固件使用。
2.作为用户 APP 应用程序串口调试输出。
注意:ACM32F4XX 芯片使用 PA9/PA10 作为串口的输入/输出管脚,因此在使用 MCU的 PA9/PA10 与第三方串口助手连接调试时,需要将其与串口调试芯片断开。
F4专题 - 应用篇
1
硬件设计
1.1 是否与 SXX32FXXX 硬件兼容?
ACM32F4XX 系列芯片硬件管脚可以与 SXX32FXXX 管脚做到兼容,原 SXX32FXXX的部分电源管脚被 ACM32F4XX 复用作为外设管脚,详细的硬件管脚配置及复用功能可参考《ACM32FXXX 对比 SXX32FXXX 差异说明.pdf》,具体以文档为准。
1.2 硬件设计注意事项
1.2.1 电源电路
ACM32F4XX 系列芯片 VDD/VDDA 电压输入范围:1.7V~3.6V,VDD 与 VDDA 之间建议用磁珠隔离,GND 与 AGND 之间建议用 0Ω 电阻隔离。
1.2.2 外部晶振电路
ACM32F4XX 系列芯片外部高速晶振输入范围:4~48MHz,典型值推荐使用 8MHz 或者 12MHz,无需外接 RF反馈电阻。
1.3 是否支持 FSMC/SDIO/以太网/ISO7816 接口?
暂不支持。
2
SDK 接口驱动库
2.1 驱动库版本
2.1.1 Keil-MDK 接口驱动库版本
ACM32F4XX 系列芯片外设接口驱动库提供 HAL 库(Hardware Abstraction Layer)、SPL库(Standard Peripherals Library),LL 库(Low-Layer)暂不支持,详细信息可咨询销售或FAE。
2.1.2 能否提供驱动库移植说明?
可以,请参考《ACM32 固件库_使用说明.pdf》文档。
2.1.3 写入启动序列后如何回到 Boot 模式?
软件程序中需要预留 HAL_EFlash_Return_To_Boot()接口函数。
2.1.4 Flash 程序如何实现回到 Boot 模式?
软件程序在执行完 HAL_EFlash_Return_To_Boot()后,如需回到 Boot 模式,可以采用重新上下电、外部 RSTN 管脚复位或 Flash 程序设置 EFC_RST 寄存器进行复位,其中 EFC_RST复位前需要将系统时钟降低至 64MHz 以下。
2.2 系统时钟
2.2.1 系统时钟如何切换至外部时钟源?
ACM32F4XX 系列芯片上电默认使用内部时钟,如需使用外部晶振作为时钟源,需要将软件程序中的宏定义 PLL_SOURCE_FROM 修改成外部时钟即可。
2.2.2 内部 RC 时钟精度是多少?
ACM32F4XX 系列芯片内部 RC64M/RC32K 精度大概率在±1%(含温漂)左右。
2.3 中断优先级配置
2.3.1 M33 内核中断优先级配置
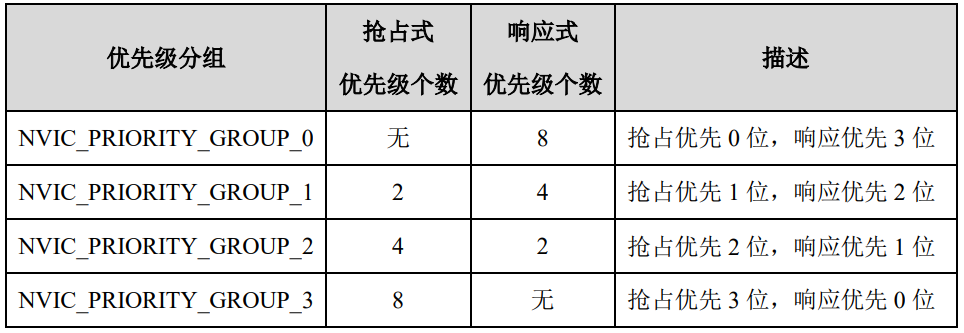
根据 M33 内核手册可知 Application Interrupt and Reset Control Register 寄存器的bit[10:8]用于设置优先级分组,Interrupt Priority Registers 寄存器的bit[7:5]用于设置中断优先级(抢占式优先级和响应式优先级),数字越小优先级别越高,优先级分组说明如下表:
抢占式优先级和响应式优先级的区别:
1.高抢占优先级中断可以打断低抢占优先级的中断,实现中断嵌套。
2.抢占优先级相同,当中断同时发生时,高响应优先级的中断先执行,两者没有嵌套关系。
3.抢占和响应优先级都相同,当中断同时发生时,硬件中断编号越小的中断先执行。
4.一般情况下,系统代码只设置一次中断优先级分组,设置好分组之后一般不会再改变分组。随意改变分组会导致中断管理混乱,程序出现意想不到的执行结果。
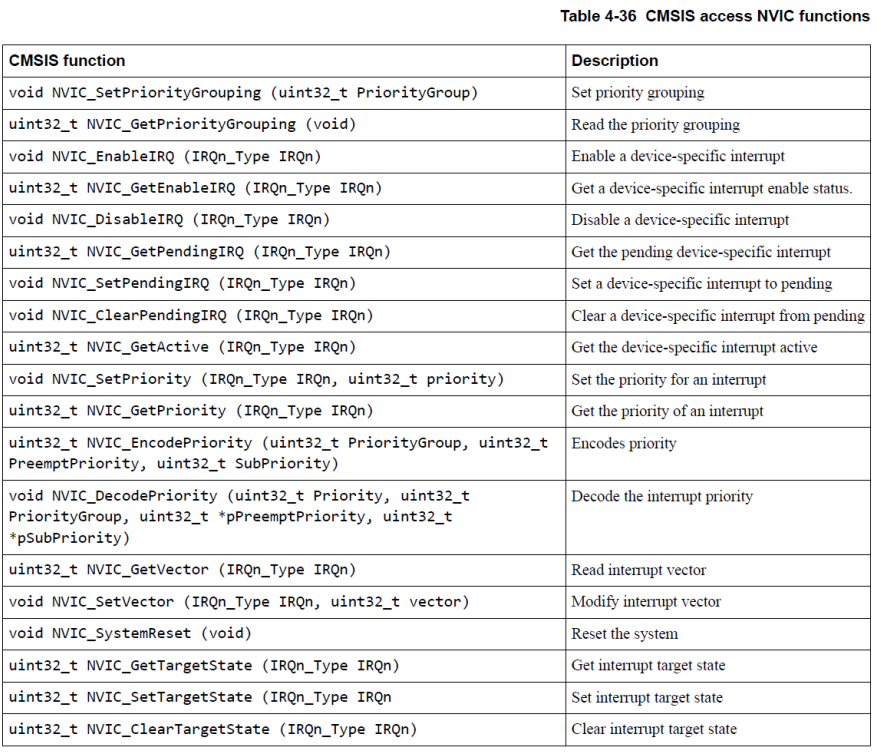
M33-NVIC 相关函数如下表:
2.4 中断向量表地址偏移
2.4.1 M33-IAP 升级中断向量表地址偏移
根据 M33 内核手册可知该架构提供中断向量偏移寄存器 REG_NVIC_VECTOR,因此在做 IAP 升级功能时,如需要实现中断向量表地址偏移,相关参考代码如下:
/* Vector Table Relocation in Internal FLASH */ SCB->VTOR = EFLASH_BASE | VECT_TAB_OFFSET;2.5 低功耗
2.5.1 STOP 模式下功耗偏高
根据应用电路情况,可将未使用的管脚配置成模拟模式,已使用的管脚根据外部电路,配置成数字模式,选择合适的上下拉或输出合适的高低电平。
3
固件下载
3.1 是否支持 J-Flash 下载固件?
支持,请参考《航芯通用 MCU 使用 JFlash 烧录程序的方法说明.pdf》文档。
3.2 是否支持离线批量烧录?
支持,离线烧录器详细信息可咨询销售或 FAE。
3.3 原厂固件下载工具 UART 波特率自适应失败
请使用最新版本的下载工具(Aisinochip_MCU_Download_Tool_v1.4.0.3.exe(含)以上)。
4
补充功能
4.1 是否支持 Flash 读保护?
支持,请参考《航芯 ACM32F 系列芯片 Flash 读保护功能说明.pdf》文档。
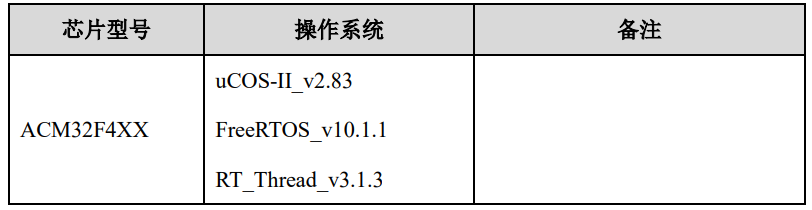
支持 uCOS-II、FreeRTOS 和 RT-Thread 操作系统,详细信息如下表:
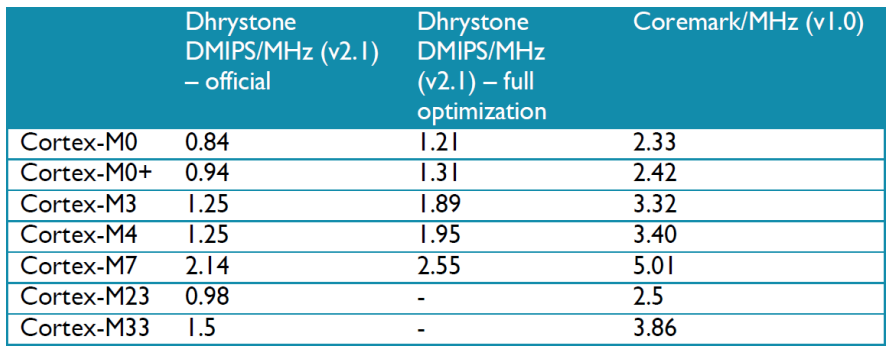
4.3 Dhrystone 测试性能
M33 内核:Keil 优化等级-Ofast,开启 ICACHE 和 DCACHE 的情况下,Dhrystone 2.1测试 1.38 MIPS/MHz。
5
GPIO
5.1 输入是否支持 5V tolerant?
ACM32F4XX 系列部分管脚支持,详细信息可参考对应型号的 DataSheet 文档。
5.2 GPIO 管脚上电默认状态?
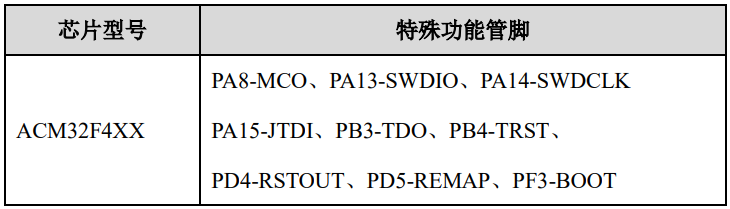
ACM32F4XX 系列芯片上电,除部分特殊的功能管脚外(见下表),其余管脚默认状态为模拟模式(数字功能失效,上下拉电阻失效)。详细信息请参考《航芯 ACM32FXXX 系列芯片 GPIO 应用手册.pdf》文档。
5.3 PC13/14/15 作为通用管脚注意事项
除正常配置 GPIO 管脚功能外,还需要调用 RTC 相关寄存器,相关参考代码如下:
/* RTC access enable */ System_Enable_Disable_RTC_Domain_Access(FUNC_ENABLE); __HAL_RTC_PC13_SEL(0); // GPIO function __HAL_RTC_PC13_PULL_UP_ENABLE(); __HAL_RTC_PC13_DIGIT();5.4 GPIO 最高翻转速率?
GPIO 翻转速率最高 50Mbps。
5.5 FT 和 TC 管脚的区别
FT:5V 耐压的管脚 IO,TC:标准 1.7V~3.3V 的管脚 IO。FT 管脚相对于 TC 管脚可以防止外部 IO 电流倒灌。
6
TIMER
6.1 PWM-duty=0 输出异常
建议通过配置成 GPIO 功能软件绕过,或通过 MOE/OSSI/OSSR/CCxE/CCxNE 组合位配置 PWM 模式绕过。
6.2 CCRx 输出比较波形周期不准
建议尝试打开 CCRx 寄存器预装载功能。如使用 CCRx 功能实现计数延时功能,则需要关闭 CCRx 预装载功能。
6.3 TIMx 刹车源信号极性如何配置?
对于 TIMx_BKIN 外部管脚和 COM1&2_OUT 源信号,可通过 TIMx_BDTR 寄存器的BKP 位设置;对于 CPU_LOCKUP、SRAM_PARITY 和 LVD_LOCK 内部信号,刹车源极性不需要设置。
7
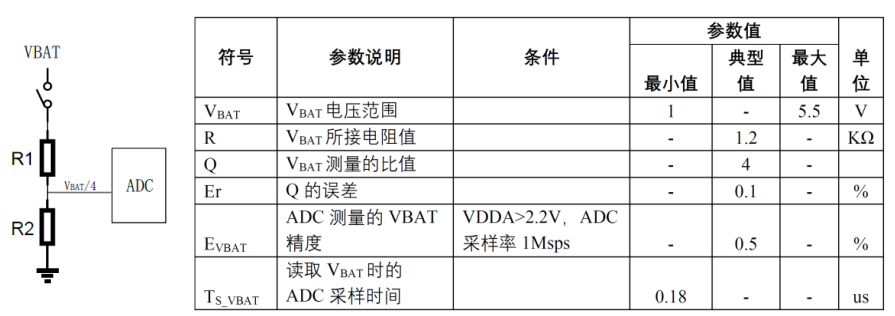
7.1 ADC_VBAT(1/4 分压)需要外部分压吗?
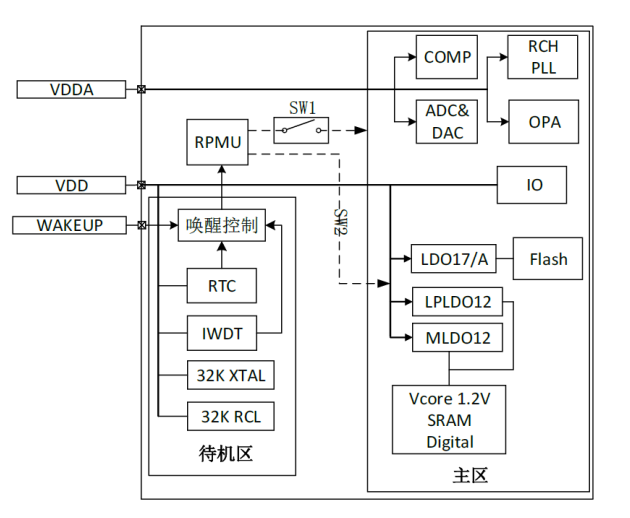
不需要,内部已配置 1/4 电阻分压,外部不需要单独的分压电路,如下图所示,内部分压电阻 R1+R2 总阻值为 1.2KΩ 左右,VBAT 为芯片 ADC 的输入管脚。详细信息请参考《航芯 ACM32FXXX 系列芯片 ADC 应用手册.pdf》文档。
7.2 ADC_Buffer 通道与普通通道是否有区别?
有区别,ADC 的 Buffer 是指缓冲放大器,相对于普通的 ADC 通道,带 Buffer 的 ADC通道输入范围小一点,输入阻抗大一点,详细信息可参考对应型号的 DataSheet 文档。
7.3 ADC 如何使用内部参考电压?
部分封装芯片 VREFP 管脚内部与 VDDA 连接在一起,因此无法使用内部参考电压。对于单独封装出 VREFP 管脚的封装芯片可以通过悬空 VREFP 管脚配置使用内部参考电压。
7.4 ADC 正常采样结果计算不准
可通过调用 ADC_GetVrefP 函数校准参考电压(出厂前使用 3.0V 对 BGR 校验)。
7.5 ADC 外部分压后采样值偏低,如何处理?
ADC 采样时间不足的情况下会引入 RAIN 电阻,导致外部管脚分压偏低,可以通过增大 ADC 采样时间恢复正常。
8
RTC
8.1 是否支持 RTC 外部独立供电?
ACM32F4XX 没有单独 vBat 接口给内部 RTC 模块供电(不支持外部电池给 RTC 供电,主区供电可关闭-StandBy 模式),下图为芯片内部电源示意图,此时 IWDT 和 RTC 仍能继续工作。如需外部独立给 RTC 供电方案,可参考《VBAT&VCC-WAKE_V0.2.pdf》文档。
9
UART
9.1 是否支持 9bit 数据位传输?
硬件本身不支持 9bit 数据位,根据应用需要,可借助校验位/STOP 位替代增加数据位数。
9.2 FIFO 使能 1 字节发送中断无法产生中断
串口发送使能+串口使能+FIFO 使能的情况下,FIFO 深度配置 1/16 字节时,发送 1 字节会直接将数据填进移位寄存器,而不经由 FIFO,进而不产生中断;如初始化不开启串口发送使能,在数据填充完毕后再开启,则发送数据会经过 FIFO 再到移位寄存器,此时能正常产生中断。
10
OPAMP
10.1 OPAMP 失调电压如何修调?
上电后可使用芯片 NVR 内部保存的修调值,或上电循环自修正。
11
11.1 接收/发送时是否支持时间戳?
不支持。
11.2 是否支持 BUS_OFF 硬件自恢复?
不支持 BUS_OFF 硬件自恢复(ABOM 功能),可通过在 BUS_OFF 中断中让 CAN 总线进入恢复模式,间接实现 BUS_OFF 硬件自恢复。
11.3 是否支持禁止自唤醒?
不支持,ACM32F4XX 在检测到 CAN_RX 上低电平后会强制唤醒。
11.4 硬件重发能否关闭?
无法关闭,ACM32F4XX 固定使能硬件重发功能。
11.5 接收 FIFO 溢出时数据如何处理?
接收 FIFO 满时,ACM32F4XX 固定会丢弃新数据,保留老数据。
11.6 发送 FIFO 数据帧发送顺序?
ACM32F4XX的 CAN 模块只有13字节的发送 FIFO,因此发送的数据帧只能依次发送,没有额外的数据帧缓存空间。
11.7 接收数据正常,发送数据失败
此类问题通过查看错误代码获取寄存器(CAN_ECC)可以大致了解出错原因,若问题主要集中在 CRC 分隔符/ACK/ACK 分隔符错误码,推荐 CAN 通讯时切换至外部晶振模式。
12
USB
12.1 是否支持免晶振模式?
支持,系统时钟配置使用内部 RC 时钟。
如系统时钟配置外部晶振模式,建议将 USBPHY 时钟通过 OSC_MODE 配置为强制选择内部 RC 模式。
13
SPI
13.1 SPI 最高速率?
SPI 主机模式:ACM32F4XX 受 GPIO 速率影响,最高 50Mbps;SPI 从机模式:ACM32F4XX 最高速率 30Mbps。
-
mcu
+关注
关注
146文章
17458浏览量
354450
发布评论请先 登录
相关推荐
海康机器人F4系列:搬运多面手,拓宽应用场景
【新品介绍】F4系列 国产640PIN高密便携式连接器

采用MSP430FR604x MCU的水流和燃气流量计量超声波传感技术的常见问题解答(FAQ)

【GD32 MCU 移植教程】8、从 STM32F4xx 系列移植到 GD32F4xx 系
航顺年度MCU新品发布,高性能迭代和新世代指纹传感器
芯海应用笔记:通用 MCU 基于 IAR 芯片包 IAR9 开发指南
芯海应用笔记:通用 MCU Flash 读写保护和 SWD 复用指导手册.
芯海通用 MCU 应用笔记 :CS32F103 系列 MCU IAP 升级指南
芯海通用 MCU 应用笔记: CS32F03x 系列硬件设计指南
芯驰科技发布最新车规MCU产品E3119F8/E3118F4






 工商网监
工商网监
评论