 智造之眼丨多目标定位抓取
智造之眼丨多目标定位抓取
多目标定位抓取:相机一次性拍摄多个目标产品,视觉软件进行图像分析定位,将像素坐标转换为物理坐标,系统传递多个产品的物理坐标给机械手,机械手进行多位置正确取放产品。
01.多目标定位抓取优势
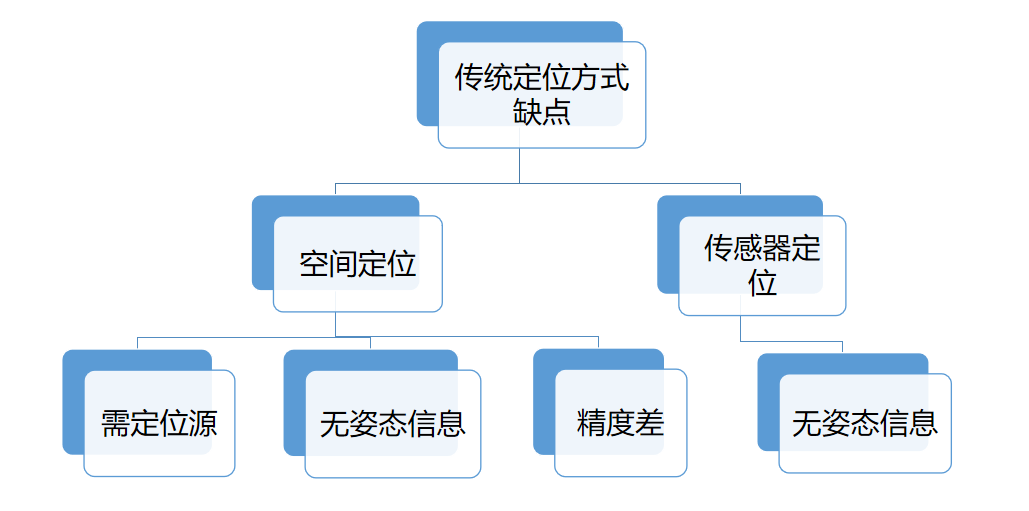
多目标定位抓取相对传统定位而言:可同时传递多个产品坐标位姿信息给机械手实现多位置抓取,大大提升工业生产的速度和精度。
02.多目标定位原理
坐标转换--四坐标系之间转换
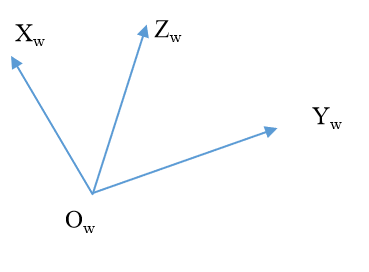
世界坐标系
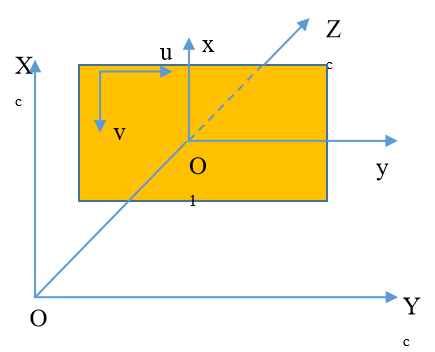
相机坐标系、图像坐标系与像素坐标系

四坐标系转换关系
03.多目标定位过程
视觉系统
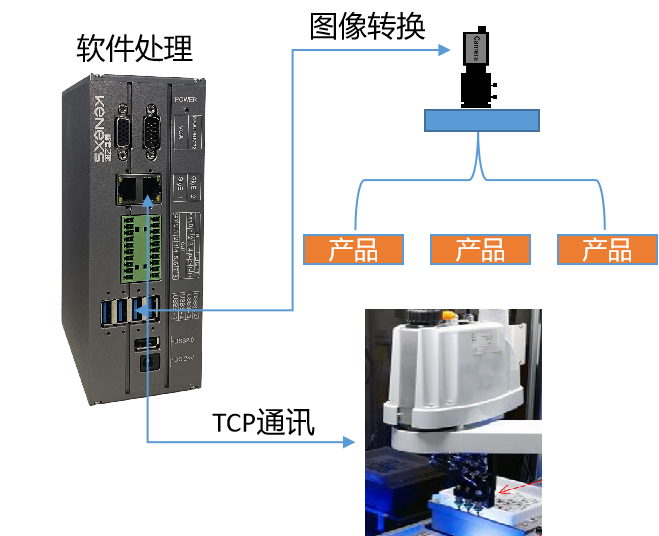
转换步骤
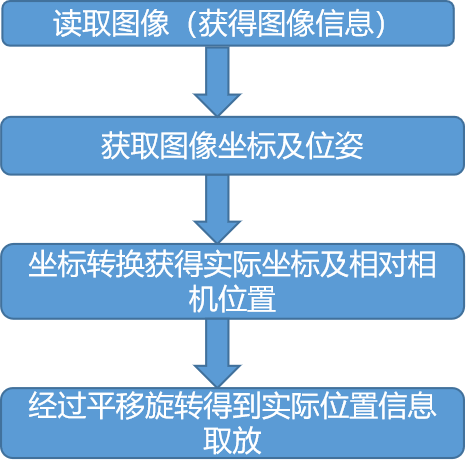
由此,机械手连接通讯获得位置坐标,实现多目标产品的定位抓取。
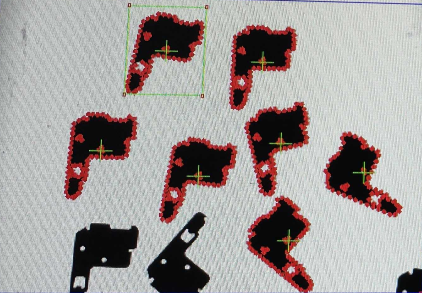
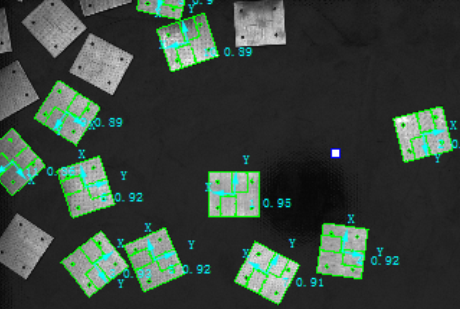
04.多目标定位抓取-算法运用
如何获取产品特征信息?
1、特征值提取(圆、圆环、矩形等)
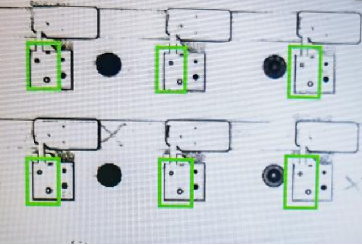
2、轮廓匹配法
3、模型匹配法等
05.多目标定位抓取-工业应用
由于工业生产应用类型多样,实际定位不仅需要定位产品的位置信息,还需要定位产品的姿态信息。
工业生产应用类型
1、柔性振动盘机械手多位置抓取产品
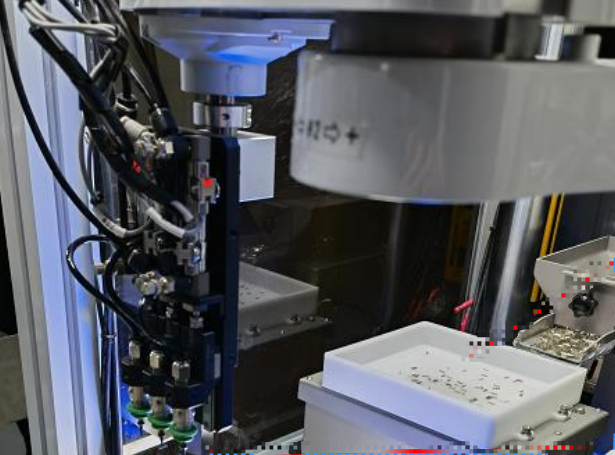
2、多位置旋转吸嘴多位置抓取

3、机械手四位置多产品抓取

智造之眼-应用数据
检测件:五金件
产品大小:约20X15mm
相机配置:500万~2000万
重复抓取精度:0.04mm
拍照处理速度:400~500ms
一次拍照定位数量:10~12pcs
专业做视觉,认真做研发。智造之眼视觉团队坚持突破技术,执着产品,深入应用,持之以恒的打造中国的视觉品牌,为世界提供又好又便宜的视觉产品和服务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器视觉
+关注
关注
162文章
4417浏览量
120853 -
视觉检测
+关注
关注
2文章
381浏览量
19443
发布评论请先 登录
相关推荐
比亚迪发布高阶智驾系统“天神之眼”
2月10日,比亚迪在智能化战略发布会上震撼发布了其最新研发的高阶智能驾驶辅助系统——“天神之眼”。这一创新成果的发布,标志着比亚迪在智能驾驶技术领域迈出了重要的一步。 据比亚迪董事长兼总裁王传福介绍
比亚迪将发布“天神之眼”高阶智驾系统
近日,比亚迪宣布将于2月10日19:30在深圳总部隆重召开智能化战略发布会。此次发布会的重头戏是推介比亚迪自主研发的“天神之眼”高阶智能驾驶系统,旨在通过技术创新进一步降低智能驾驶的使用门槛,推动
浅谈多目标优化约束条件下充电设施有序充电控制策略
随着电动汽车的普及,充电设施的需求日益增长,如何在多目标优化约束下实现充电设施的有序充电成为亟待解决的问题。新能源汽车的快速发展为清洁能源和可持续交通带来了新机遇,但也引出了许多问题。其中,充电设施的有序充电控制策略在多目标优化约束条件下显得尤为重要。
使用STT全面提升自动驾驶中的多目标跟踪
3D多目标跟踪(3D MOT)在各种机器人应用中发挥着关键作用,例如自动驾驶车辆。为了在驾驶时避免碰撞,机器人汽车必须可靠地跟踪道路上的物体,并准确估计它们的运动状态,例如速度和加速度。

重塑定位边界:革新 UWB 信标定位系统测试套件,精准并发融合引领未来
面对日益复杂多变的应用场景及高并发需求的激增,巍泰技术特隆重推出采用 TurMass 无线通信技术的 UWB 信标定位系统测试套件 WTS-102 ,为各类复杂应用场景提供持续、可靠、精准的定位服务。

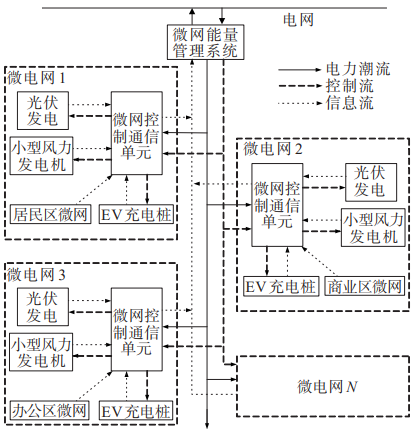
浅谈分时电价下含电动汽车的微电网群双层多目标优化调度
充电满意度多目标下的电动汽车充电模式,建立了微电网内运营商峰谷差—用户充电费用少和充电满意度的双盈多目标优化调度模型,采用上海市实际居民办公商业混合体,基于MATLAB/NSGA‑Ⅱ算法求解负荷整形度;采取粒子群优化算法求解电动汽车车主达

助力风电行业!深视智能SR7400线激光以机器人手眼标定实现风力叶片切割引导
机器人手眼标定在机器人视觉领域,手眼标定是重要的一步,也是使自动化系统更加精确高效的关键一环。手眼标定可以帮助机器人转换识别到的视觉信息,从而完成后续的控制工作(如抓取、焊接、喷涂、搬

多目标智能识别系统
智慧华盛恒辉多目标智能识别系统是一种利用现代计算机视觉技术和人工智能算法,从图像或视频中同时识别和分类多个目标物体的系统。这种系统广泛应用于自动驾驶、智能监控、人机交互、军事侦察、灾害监测等多个领域
基于GIS的SAR多目标智能识别系统
智慧华盛恒辉基于GIS的SAR多目标智能识别系统是一个集成了合成孔径雷达(SAR)和地理信息系统(GIS)技术的先进系统,旨在实现高分辨率雷达图像中的多目标智能识别。以下是该系统的详细介绍: 智慧华
多目标跟踪算法总结归纳
多目标跟踪是计算机视觉领域中的一个重要任务,它旨在从视频或图像序列中准确地检测和跟踪多个移动目标。不过在落地部署时,有一些关键点需要解决。

以色列人工智能目标定位系统实力如何
2019年,以色列政府宣布成立“目标定位局”,旨在为以色列国防军(IDF),特别是以色列空军(IAF)生成打击目标。
蓝牙信标定位精度
蓝牙信标定位精度受到多种因素的影响,包括设备硬件、环境因素以及信号干扰等。因此,蓝牙信标的精度并不是固定的,而是会在一定范围内波动。在我们实际应用过程中,蓝牙信标的精度通常可以做到2-5米。本文重点







 工商网监
工商网监
评论