 还可以这样实现ARM+ROS(机器人操作系统)
还可以这样实现ARM+ROS(机器人操作系统)
如何低成本搭建ARM+ROS的硬件载体?本文将为读者提供一个全新的技术方案。全文分概述、硬件与底层、ROS搭建三个章节,敬请订阅。
1.ROS简介
ROS是机器人操作系统(RobotOperatingSystem)的英文缩写,是用于编写机器人软件程序的一种具有高度灵活性的软件架构,其原型源自斯坦福大学的StanfordArtificialIntelligenceRobot(STAIR)和PersonalRobotics(PR)项目。

ROS是一个用于实现机器人编程和开发复杂机器人应用程序的开源软件框架,依托于Linux之类的操作系统上,所以ROS也被称为元操作系统或中间件软件框架。ROS提供了各类成熟的功能包,如:摄像头驱动、OpenCV图像处理、SLAM建图导航等。功能包中的代码可以是C++、Python、Octave等不同的编程语言编写,虽然不同模块基于不同语言编写,但仍可以被ROS组合起来一起使用。这意味着,当开发新款机器人时,开发者不需要做基础的传感器驱动、甚至不必实现某些应用,直接调用ROS自带的功能包,同时ROS是分布式架构,对于大型复杂机器人而言,可以把各个功能分别部署在不同控制板上。

2.硬件介绍
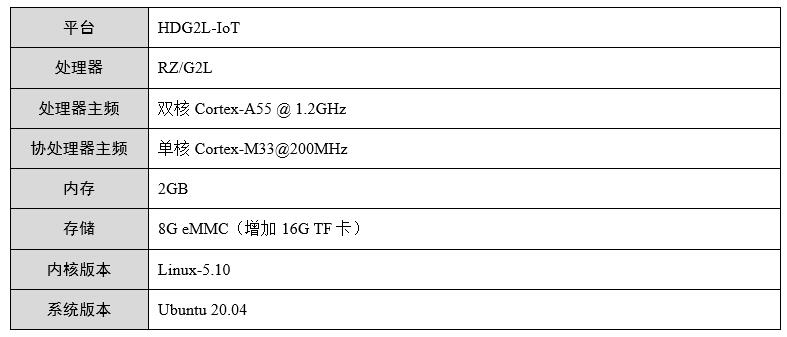
本文档使用本司的HDG2L-IoT评估套件来实现ROS应用环境,硬件产品如下所示。

硬件平台环境条件如下所示:
表2.1硬件平台资源
3.技术总结
目前实现ROS的方式主要有两种:
Ubuntu系统+ROS;
Ubuntu系统+docker+ROS镜像;
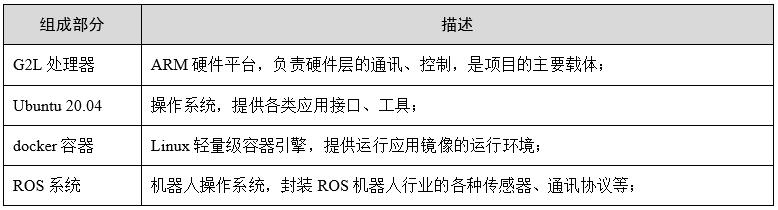
相对而言,使用dockers运行ROS镜像的部署方式,可以大大加快设备部署、移植工作。第二章节也将基于方案2去实现ROS,组成项目的各个部分功能如下所示:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ARM
+关注
关注
134文章
9111浏览量
368037
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更高效地应对复杂环境和多样化需求
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
要给AI这个聪明的“头脑”装上一副“身体”。这个“身体”可以是一部手机,可以是一台自动驾驶汽车。而人形机器人则是集各类核心尖端技术于一体的载体,是具身智能的代表产品。与传统的软件智能体不同,具身智能
发表于 12-19 22:26
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联手古月居共同推出首本基于RDK

什么是嵌入式操作系统?
什么是嵌入式操作系统? 想象一下,如果一个智能设备,比如你口袋里的智能手机,是一个有头脑的机器人,那么嵌入式操作系统(Embedded Operating System,简称EOS)就相当于这个
发表于 11-08 15:07
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的
发表于 07-09 11:38
Al大模型机器人
理解能力强大: AI大模型机器人可以理解和生成自然语言,能够进行复杂的对话和语言任务。它们能够识别语言中的语义、语境和情感,并据此作出适当的回应。广泛的知识储备: 这些模型基于大规模的数据集进行训练,拥有
发表于 07-05 08:52

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
一、实验目的
本实验通过TL3568-PlusTEB教学实验箱修改机械臂不同舵机的角度,增加延迟时间,从而做到机械臂跳舞的效果。
二、实验原理
ROS(机器人操作系统)
ROS(
发表于 06-28 14:37
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
同步协调运行,实现这些复杂的动作离不开伺服驱动器的支持;IO模块将数字输入信号与系统的控制信号关联起来, 这样就可以实现对
发表于 05-11 09:40
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统
江苏大学与科东软件联合研发“农业机器人操作系统”,并成立“农业机器人操作系统”联合实验室,奋力推进农业智能化,推动农业科技创新。“农业机器人
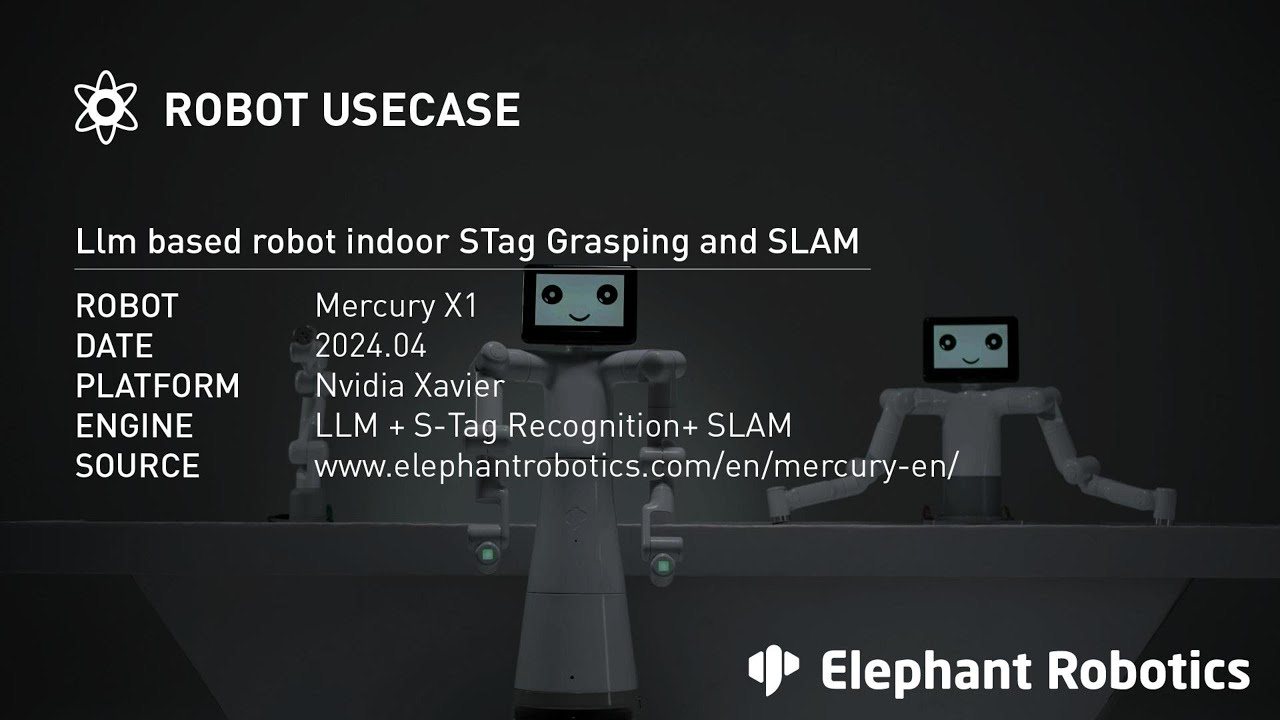
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
定位与映射(SLAM)、机器人操作系统(ROS)、开源计算机视觉(OpenCV)和S-Tag标记码技术来实现复杂环境中的精确物体抓取和移动。 此案例不仅展示了
实现机器人操作系统——ADI Trinamic电机控制器ROS1驱动程序简介
摘要 机器人操作系统(ROS)驱动程序基于ADI产品而开发,因此可直接在ROS生态系统中使用这些产品。本文将概述如何在应用、产品和

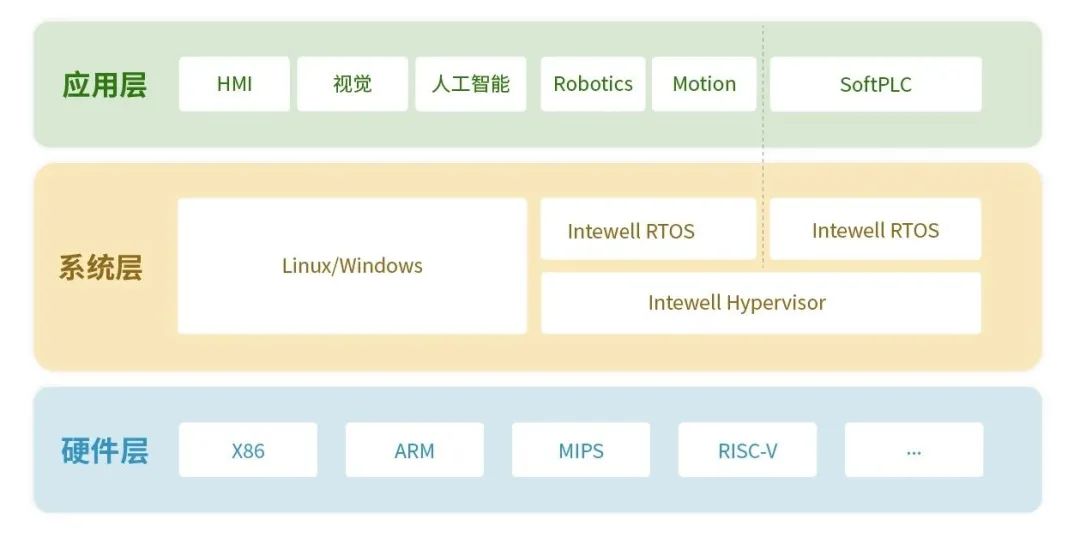
工业控制:鸿道(Intewell)操作系统工业机器人控制解决方案
鸿道(Intewell)操作系统作为核心基础软件,构建机器人控制系统的底层技术平台。系统支持Linux/Windows的实时扩展,设备上可同时运行单个非实时





 工商网监
工商网监
评论