 直角坐标机器人&关节机器人的区别详解
直角坐标机器人&关节机器人的区别详解
直角坐标机器人
直角坐标机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。又称大型的直角坐标机器人,也称桁架机器人或龙门式机器人,其工作的行为方式主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。
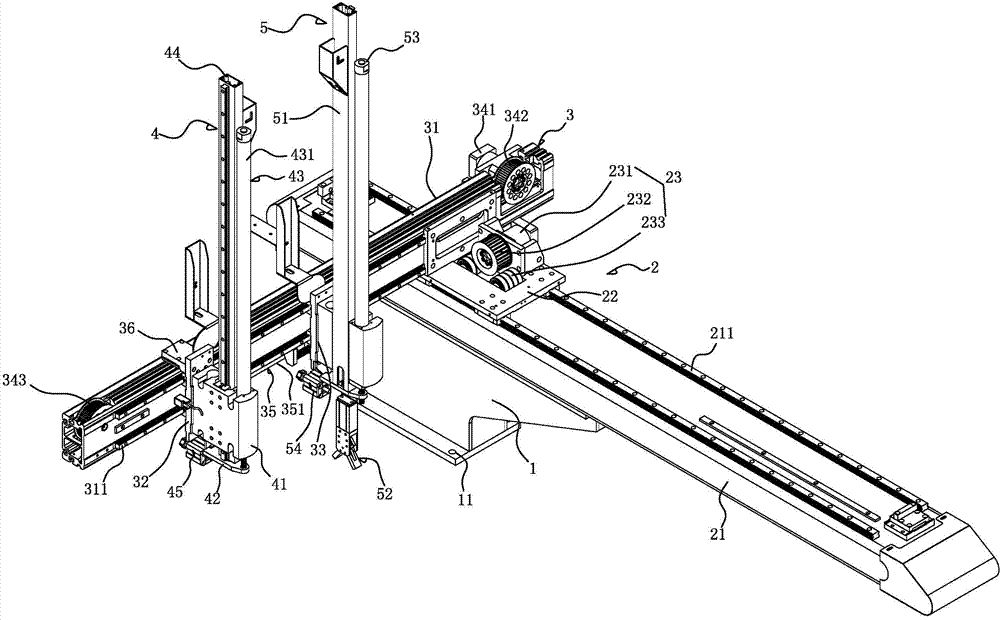

直坐标机器人控制系统
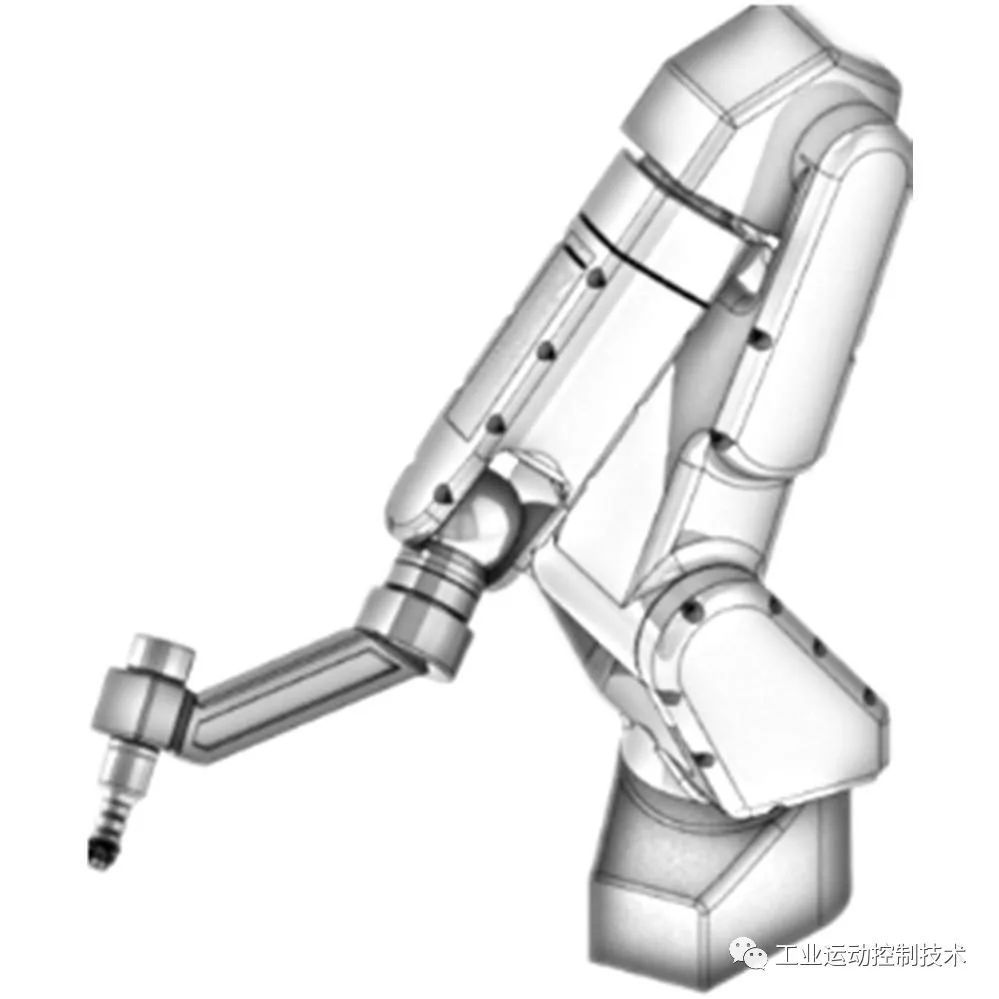
关节机器人
关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。
直角坐标机器人与关节机器人有哪些方面的区别?
一、工作空间与承载能力
1、直角坐标型标准单根长度6m,拼装后可达到100m;组合成龙门式机器人,其工作空间可以是非常的三维立体空间。特殊结构承载可达上吨。
2、关节型最大工作半径3m,在有效半径内可以任何角度工作。承载能力有几种规格可选,但价格及其昂贵。
二、工作精度
1、直角坐标型:由于结构简单,重复定位精度0.05mm,丝杠型可达0.01mm,甚至更高。
2、关节型:重复定位精度0.06mm,轻载荷小半径0.02mm,重载荷精度0.2mm。
三、组合方式
1、直角坐标型组合方式多样,龙门式、悬臂式、壁挂式等,可根据不同的负载、行程、功能及特殊空间要求,为客户订制所需求产品。同时,X、Y、Z三轴基础上可以扩展旋转轴和翻转轴,构成五自由度和六自由度机器人。
2、关节型可细分为6自由度机器人、Scara机器人、四连杆机器人,种类相对少,选择性和灵活性较直角坐标型小很多。
四、软件编程操控和维护
1、从电气系统到上位机直角坐标型都是开放、灵活的。编程简单,用户可以随意扩展,操控简单易操作。简单程序问题和硬件故障,客户可以自行处理,例如更换驱动电机、PLC等,维护费用低。
2、关节型机器人:软件系统集成化,库函数直接调用,是其软件优点。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。
-
机器人
+关注
关注
211文章
28380浏览量
206918
发布评论请先 登录
相关推荐
泰科机器人获奖,开启人形机器人关节模组新动力

直角坐标机器人在精密制造中可以执行哪些任务?

【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
开源项目!用ESP32做一个可爱的无用机器人
地瓜机器人全新亮相:引领机器人时代&quot;母生态&quot;的革新

柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展

DIY推荐!自制一个基于ESP32的沙画机器人
常见的多关节机器人有哪些?具有什么特点?






 工商网监
工商网监
评论