 旭日,从地平线升起——地平线旭日X3派开箱试用
旭日,从地平线升起——地平线旭日X3派开箱试用
1_缘起:2022年6月14日,旭日X3派机器人开发板正式发布。看了发布会的视频,立刻决定,淘宝拍下第一块旭日派,看看时间,6月15日凌晨2点。

2_开箱验货:第一块旭日X3派到手,迫不及待拆开瞅瞅。

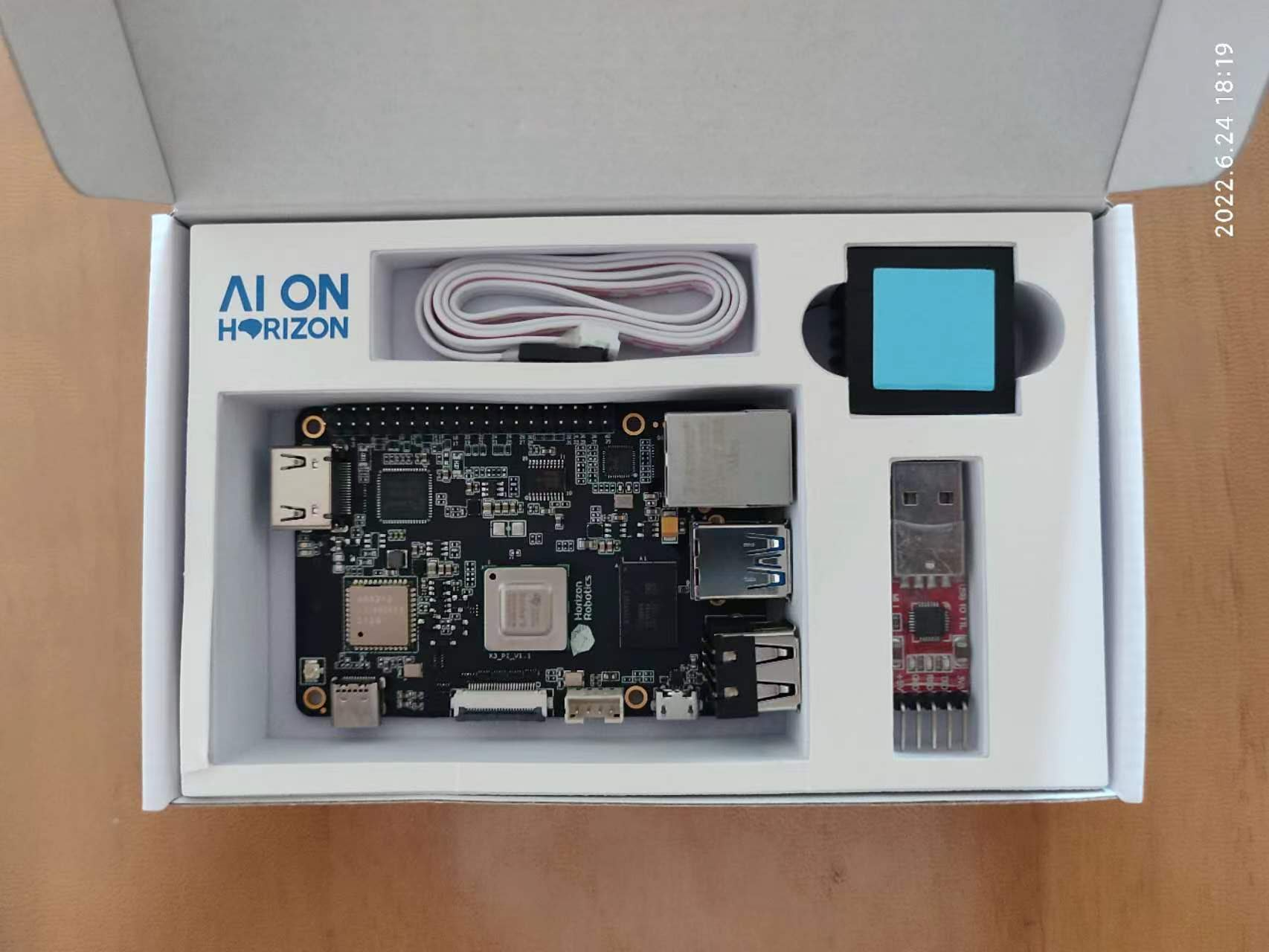
3_准备工作,先准备好元器件:旭日X3派,电源线(5V3A),TF卡(16G),读卡器,摄像头组件,串口通讯模块,显示屏(器),HDMI线,外带一瓶可乐

4_开始刷机,先下载工具软件和镜像文件:
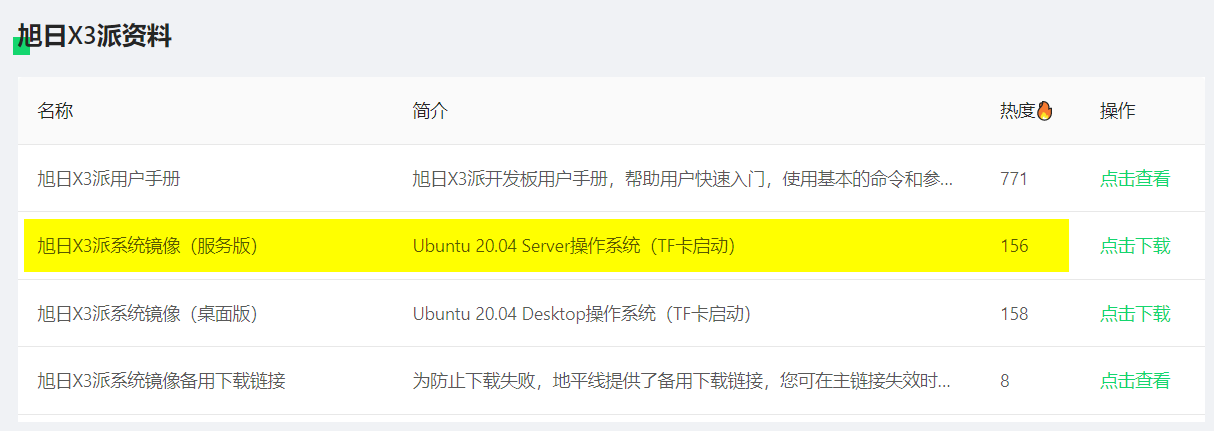
① 系统镜像文件:https://developer.horizon.ai/resource
系统镜像文件有“服务版”和“桌面版”,由于旭日X3芯片不支持GPU硬件加速,因此使用Ubuntu Desktop版本(桌面版)时,可能会因CPU渲染图形桌面而造成系统负载过大,如对系统性能有较高要求,推荐使用不带图形桌面的Ubuntu Server版本(服务版)。下载后解压,获得系统镜像文件system_sdcard.img。
② 下载安装烧录工具:https://developer.horizon.ai/resource
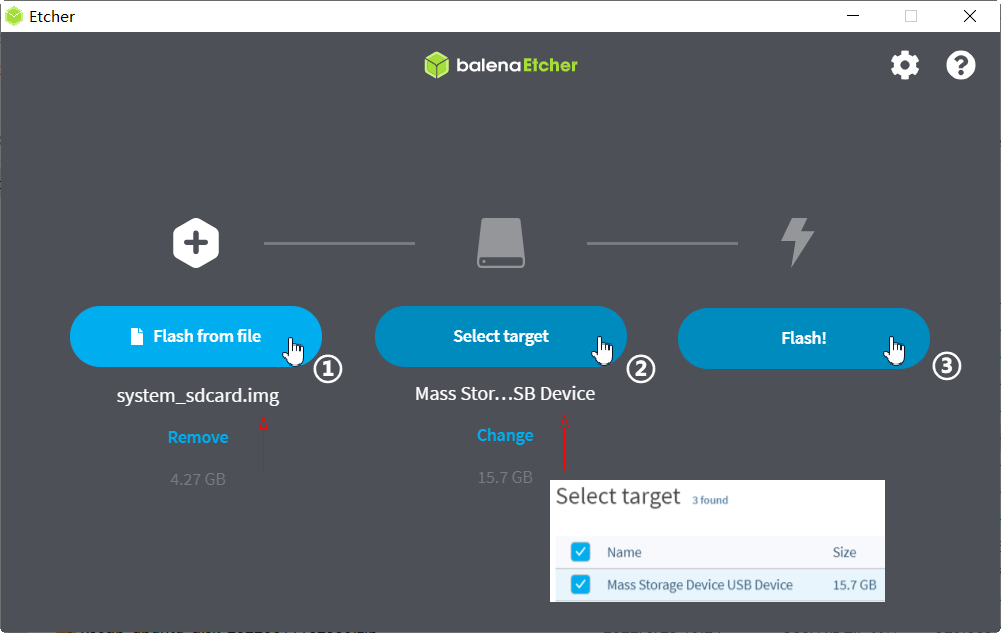
烧录工具官方推荐balenaEtcher、rufus等第三方PC工具,用于一键式制作TF启动盘,同样可以在地平线“文档中心”下载,个人比较喜欢balenaEtcher的界面。

③ 烧录系统:电脑插入TF卡,打开balenaEtcher软件,第一步选择镜像文件,第二步选择目标存储设备(TF卡),第三步Flash一下
④ 插入TF卡:系统启动盘制作完成后,取出TF卡,将TF卡插入旭日X3开发板。
5_串口调试:
① 下载安装串口驱动(系统可以自动识别串口的略过):串口驱动程序可在地平线“文档中心”下载。
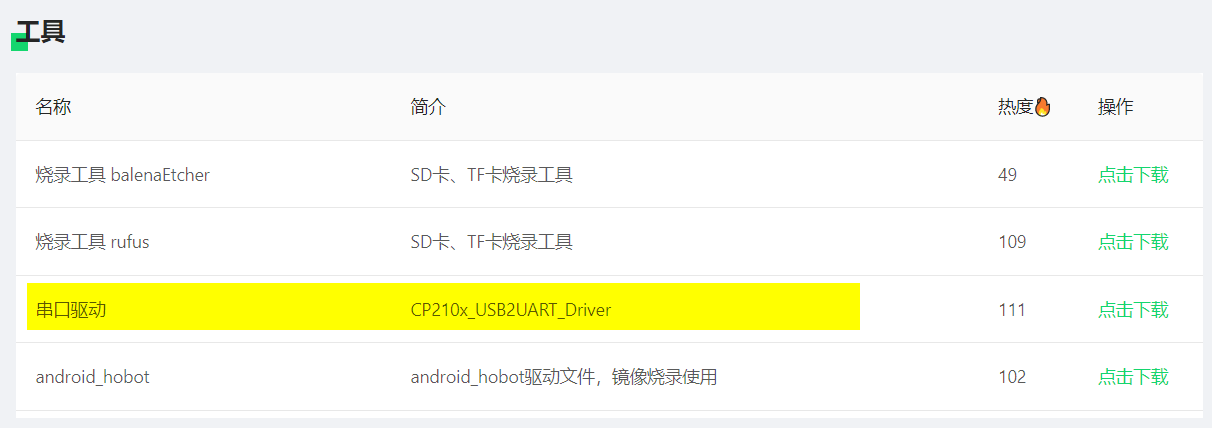
② 接线:将串口模块接线端插入旭日派开发板串口通讯接口,一端插入电脑USB口,检查电脑硬件,确认已经识别到串口端口号(本机为COM7)。
③ 下载安装串口调试工具mobaXterm https://mobaxterm.mobatek.net/download.html
运行串口调试工具mobaXterm→USB插入串口模块→单击“Session”→单击“Serial”→选择端口“COM7”→选择波特率“921600”→板卡供电→输入用户名和密码(sunrise)
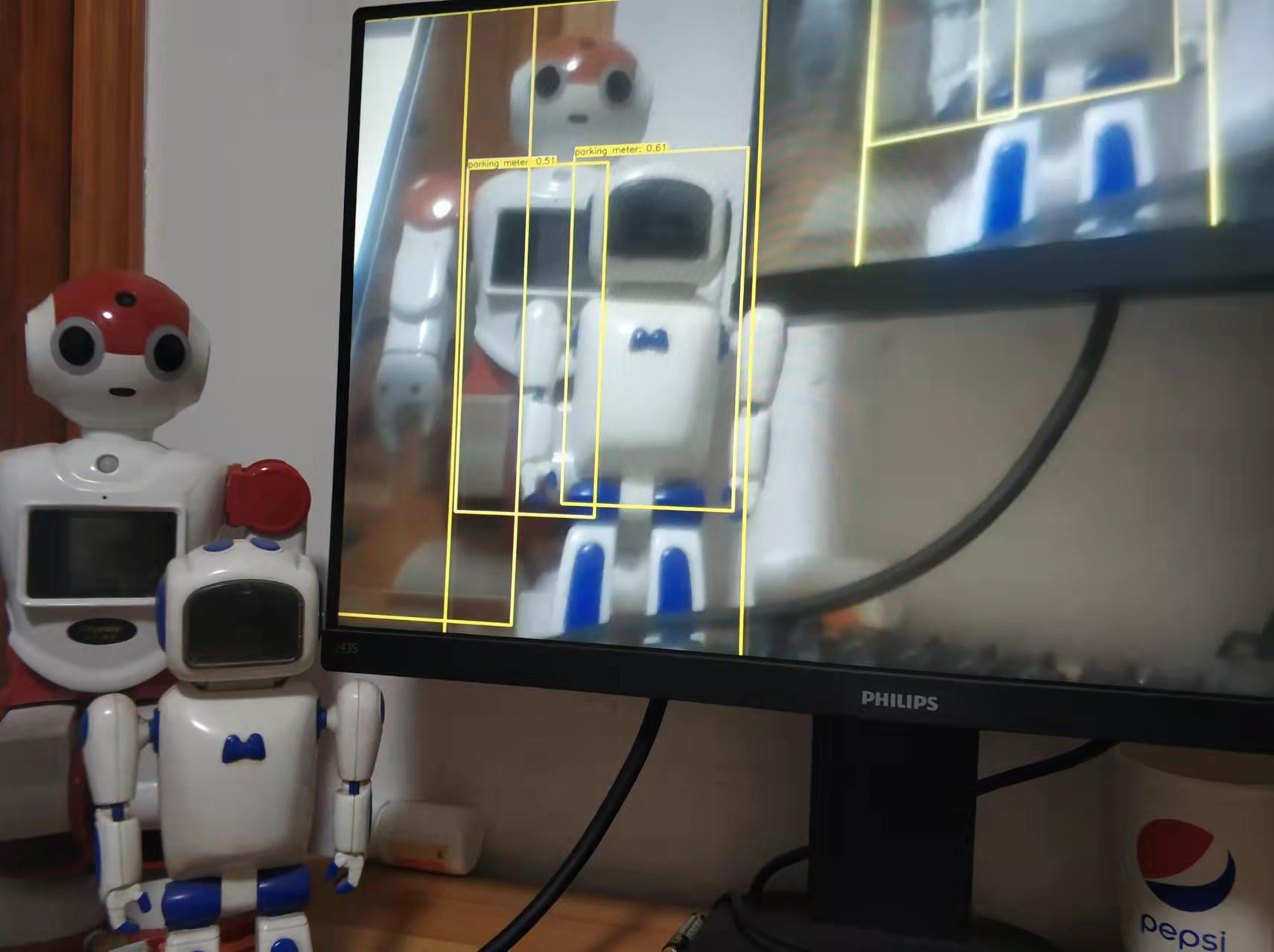
6_Hello World,旭日X3的Hello World其实可以非常special:
① 将摄像头模组通过FPC排线接到开发板MIPI CSI接口上,接线时注意,FPC排线蓝色标识向上,连接两端接口;
② 通过HDMI线缆连接开发板和显示器;
③ 输入以下命令行:
sunrise@ubuntu:~$ cd /app/ai_inference/03_mipi_camera_sample/
sunrise@ubuntu:/app/ai_inference/03_mipi_camera_sample$ sudo python3 ./mipi_camera.py
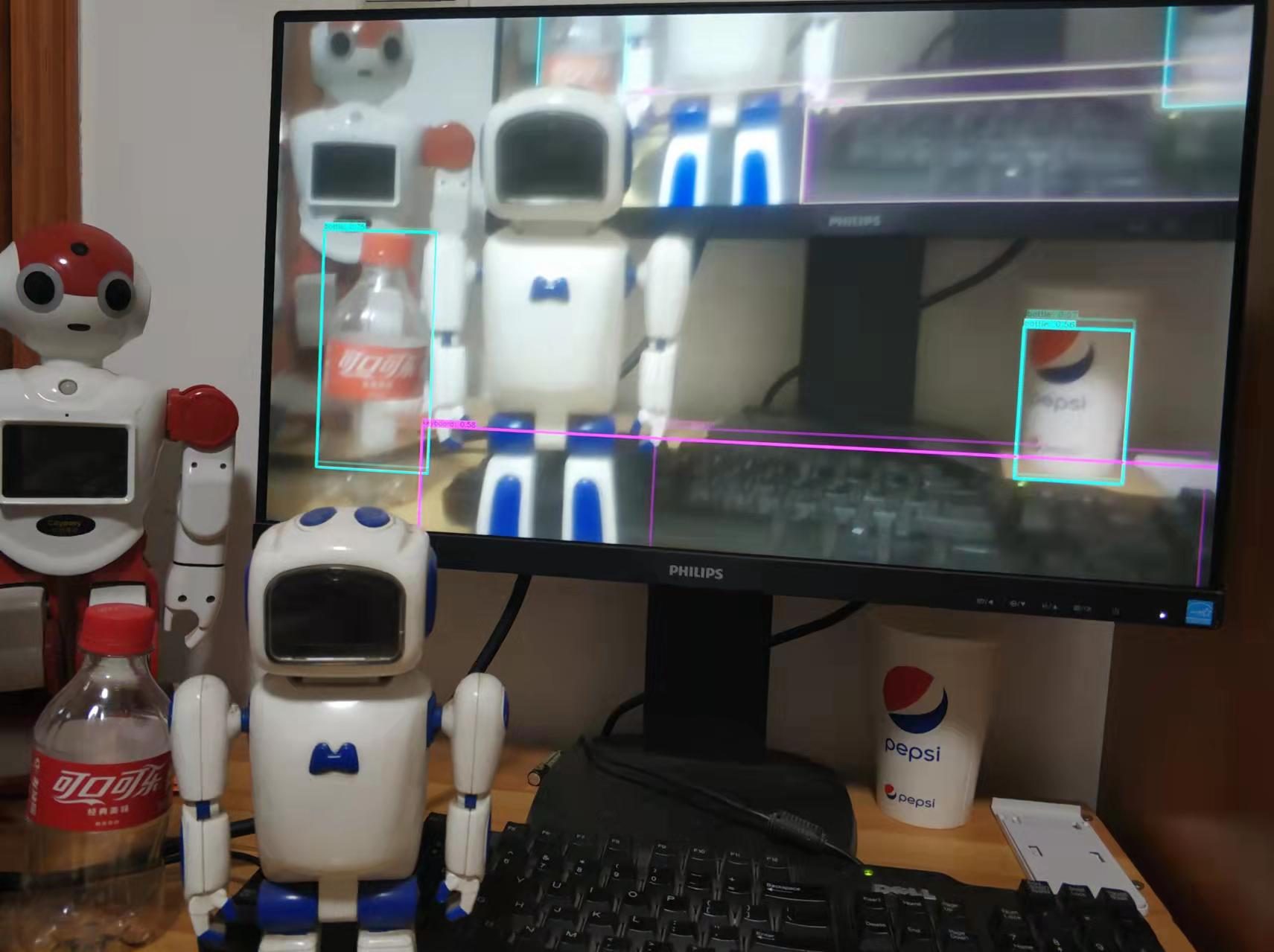
我的可乐瓶子轻松识别出来了,但是两台Robot没有识别出来,再动动摄像头,终于找到我的Robot,识别为“Parking meter”,我发现还真有点像。

7_路边的坑,千万不要踩:
开机大吉,其实都是安慰,还有许多莫名其妙的坑,旭友要提防,比如使用旧的TF卡,我在最初实验的过程中,其实好多次都是不成功的,原因是......
原作者:David988
原链接:详见地平线开发者社区
-
嵌入式
+关注
关注
5083文章
19131浏览量
305451
发布评论请先 登录
相关推荐
光庭信息获地平线坚实后盾奖
地平线荣获岚图汽车“优秀合作伙伴奖”
地平线荣获比亚迪“最佳合作伙伴奖”
智驾科技企业地平线登陆港交所
ETAS支持地平线征程6 AUTOSAR版本发布
智驾科技企业地平线通过港交所聆讯 IPO进入倒计时







 工商网监
工商网监
评论