 旭日X3派更新最小启动固件
旭日X3派更新最小启动固件
当拿到旭日X3派时,我们需要选择一张SD卡来烧录系统固件。目前对SD卡的限制比较多,需要U10速度以上,最好是大厂出的新卡。对于一些旧卡,或者速度没有达到U10的卡,经常出现兼容性问题。
本文介绍通过更新旭日X3派的最小启动固件的方式来提高SD卡的兼容性。
目前有两种方式来更新最小启动固件:
第一种是通过板端更新的方式,适合已经有可以使用的SD卡,以下是操作方法。
第二种是通过地平线的的刷机工具进行更新,这种方式适合手上没有可用SD卡的用户。
第一种方式:
1、 通过以下命令更新系统到最新版本(要求系统v1.1.0以上)
sudo apt updatesudo apt full-upgradesudo reboot通过命令 cat /etc/version 查看系统版本。
2、下载固件文件
请根据自己开发板的内存大小选择下载合适的固件文件。
2GB内存对应的固件:
cd /userdatawget https://developer.horizon.ai/api/v1/static/fileData/disk_nand_minimum_boot_2GB_20220913141345.img4GB内存对应的固件:
cd /userdatawget https://developer.horizon.ai/api/v1/static/fileData/disk_nand_minimum_boot_4GB_20220913141512.img正确的下载过程如下所示,固件文件大小为8MB:
root@ubuntu:/userdata# wget https://developer.horizon.ai/api/v1/static/fileData/disk_nand_minimum_boot_2GB_20220913141345.img--2022-08-02 06:16:16-- https://developer.horizon.ai/api/v1/static/fileData/disk_nand_minimum_boot_2GB_20220913141345.imgResolving developer.horizon.ai (developer.horizon.ai)... 42.62.85.30Connecting to developer.horizon.ai (developer.horizon.ai)|42.62.85.30|:443... connected.HTTP request sent, awaiting response... 200 Length: 8388608 (8.0M) [application/octet-stream]Saving to: ‘disk_nand_minimum_boot_2GB_20220913141345.img’disk_nand_minimum_boot_2GB_20220913141345.img 100%[==================================================================================================>] 8.00M 882KB/s in 9.8s 2022-09-13 14:23:05 (835 KB/s) - ‘disk_nand_minimum_boot_2GB_20220913141345.img’ saved [8388608/8388608]3、更新
2GB内存固件:
sudo update_minimum_boot disk_nand_minimum_boot_2GB_20220913141345.img sudo reboot4GB内存固件:
sudo update_minimum_boot disk_nand_minimum_boot_4GB_20220913141512.imgsudo reboot设备重启正常基本就说明已经完成了升级。
第二种方式:
解决的问题:给没有烧录任何程序的空片旭日X3派开发板烧录最小启动镜像
地平线X3开发板没有任何程序的空片 X3 派硬件在启动时,表现为设备启动后进入到串口下载模式,串口持续打印 'CCC' ,这种情况下需要使用升级工具给开发板烧录最小启动镜像。
镜像下载:
在 资源中心 “X3 派资料包” 下载 “X3 派系统镜像”
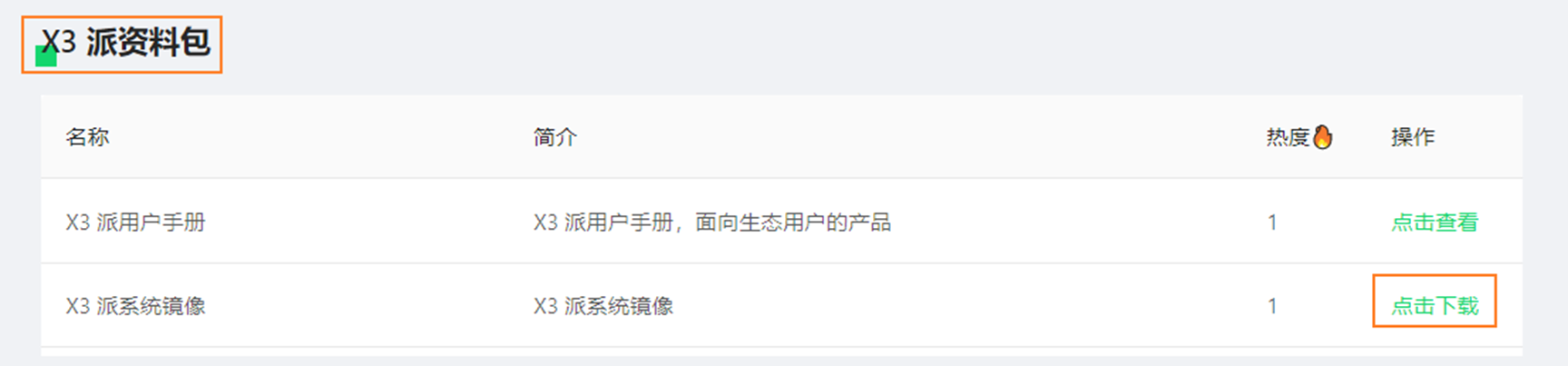
解压后的 disk_nand.img 就是最小启动固件,需要升级到开发板上。
硬件连接:
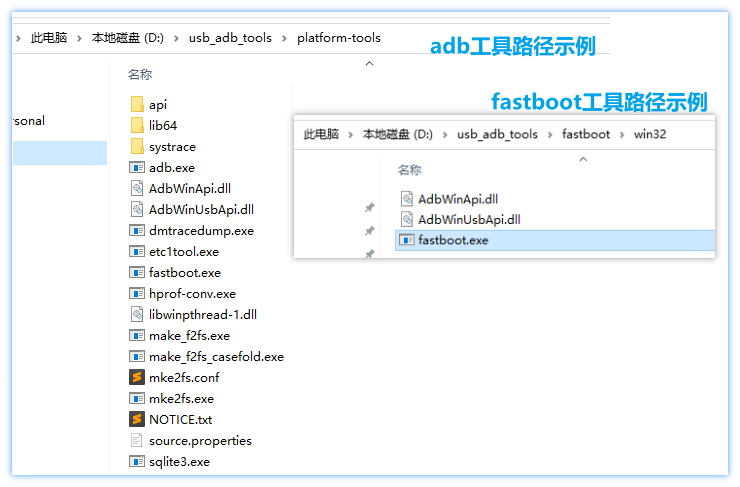
安装 adb 和 fastboot 命令:
选择一个不带 空格、中文、特殊字符 的文件夹解压以上两个工具包,例如解压到 D:/usb_adb_tools
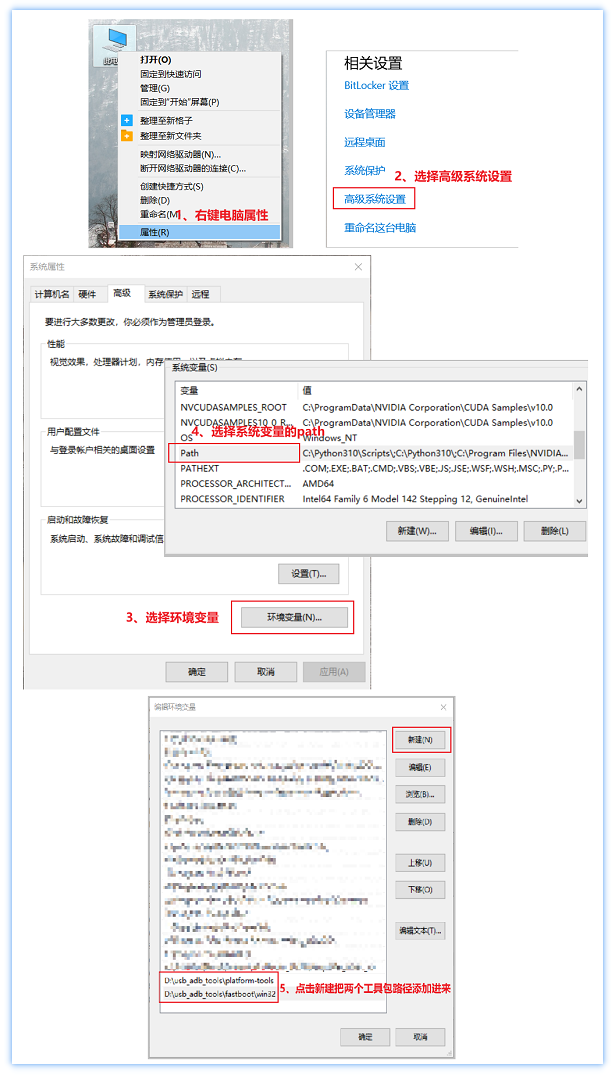
打开windows系统的高级环境配置,把这两个工具包的路径添加到环境变量中。
安装USB驱动:
在使用到fastboot功能前,比如使用fastboot升级固件,在终端程序上执行fastboot命令,需要确认PC是否安装了fastboot驱动。
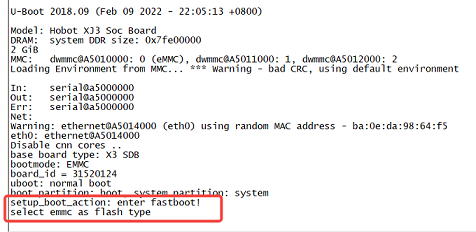
你可在开发板控制台中输入reboot fastboot,设备会自动重启并进入fastboot模式,串口log如下:
如未安装驱动,设备管理器会提示未知设备,如下图:
此时,你需要首先安装fastboot驱动程序,PC机才能正常识别fastboot端口,驱动程序下载:
https://developer.horizon.ai/api/v1/static/fileData/1650876383681.rar
按照以下步骤安装驱动:
1)解压 android_hobot_winusb.zip ,以管理员身份运行 5-runasadmin_register-CA-cer.cmd 完成驱动程序的注册
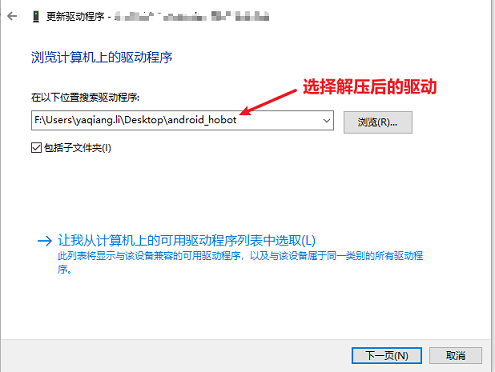
2)右键点击设备管理器中带问号的 USB download gadget,并选择解压出的驱动文件夹andriod_hobot,然后点击下一步,完成驱动安装
3)驱动安装完成后,设备管理器会显示fastboot设备Android Device,如下图:
操作步骤:
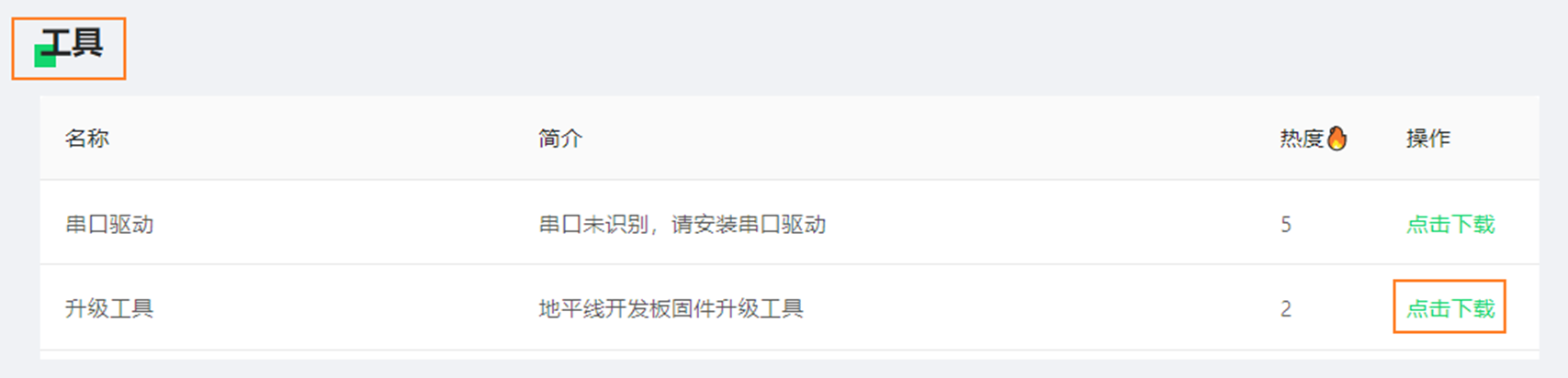
1、 在 资源中心 “工具” 下载 “升级工具”
2、安装升级工具
本升级工具是绿色免安装工具,只要解压出来即可使用,要求解压目录不能包含 中文、空格、特殊字符。
3、 运行升级工具
进入到解压目录,双击 hbupdate.exe 执行
4、配置升级工具
升级工具启动后,在 “升级模板” 菜单下选择 “X3PI-Ubuntu”
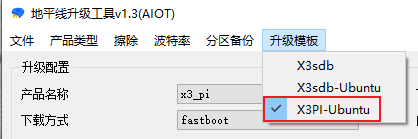
正确的配置如下图所示:

5、开始升级
首先给设备断电,然后点击升级工具的 “开始升级” 按钮,根据提示信息给设备上电,在“升级信息”栏可以看到设备进入到 uart 下载模式,之后升级会自动完成。
6、检查升级是否成功
升级完成后,不管升级工具提示成功还是失败,都给设备断电重启,如果设备不再进入到串口下载模式,持续打印 'CCC', 就说明烧录成功。
原作者:AI搬砖客
-
嵌入式
+关注
关注
5112文章
19330浏览量
311030 -
固件
+关注
关注
10文章
561浏览量
23390 -
AIoT
+关注
关注
8文章
1442浏览量
31449
发布评论请先 登录
相关推荐
拯救你的树莓派!无法启动不用慌!

dlp3010更新固件失败的原因?怎么解决?
dlpc3438+dlpa3000固件更新失败的原因?怎么解决?

Cadence推出Palladium Z3与Protium X3系统
AirPods如何进行固件更新
Simplelink™ Wi-Fi® CC3x20、CC3x3x无线更新






 工商网监
工商网监
评论