 科瑞特(CRT)3~6轴抛光运动控制示教系统
科瑞特(CRT)3~6轴抛光运动控制示教系统
一、CRT3-6轴控制系统功能及应用简介
系统采用全示教操作方式,降低用工门槛,大屏触摸操作,傻瓜化、上手快;
硬件可选3~6轴。多轴联动,轻松实现3轴螺旋插补,3~6轴直线插补;
大存储空间,内置512个程序自由切换,每个程序默认200个动作步序;
可针对客户做定制开发以满足特殊需求;
适用于拉丝、打磨、抛光等工艺,可用于手机壳毛边打磨、不锈钢餐具抛光、表壳抛光等。
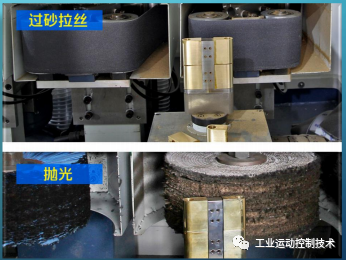
过砂拉丝抛光
二、系统操作界面功能介绍
1、主界面
手动操作、参数设置、程序浏览、运行画面,四个模块组成。
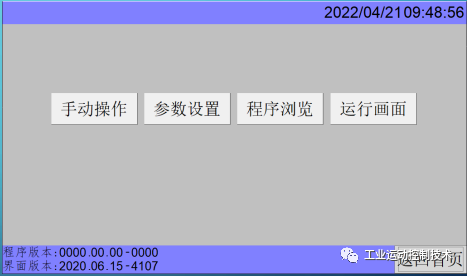
主界面
2、手动界面
实现各轴手动操作和IO点的状态显示。
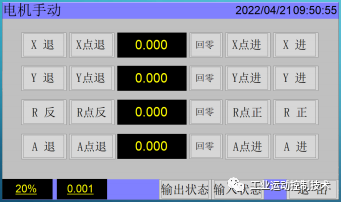
电机手动
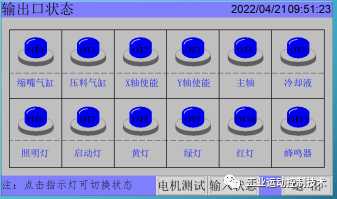
输出状态

输入状态
3、运行状态界面
运行状态监控,整机启停操作。

运行状态
4、参数设置界面
基本运动参数、各轴硬件参数、系统功能配置参数、用户权限参数。
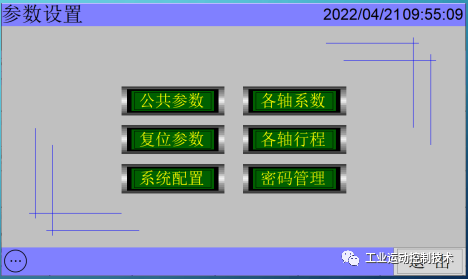
参数设置
5、程序编辑界面
程序选择与切换,动作步序的编辑;
基本动作:轴单动、直线联动、圆弧联动、IO动作、延时、循环,支持自由定制。

程序示教编辑
基本动作选项:轴单动、直线联动、圆弧联动、IO动作、延时、循环,支持自由定制。

基本动作选项
6、绝对坐标定位
3轴绝对坐标螺旋插补示教。
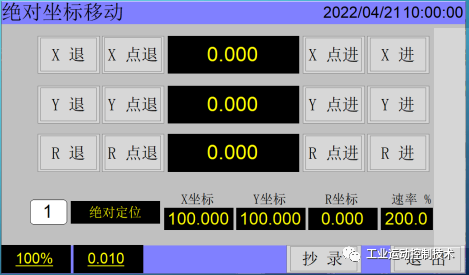
绝对坐标移动
7、自定义循环示例
20个计数器自定义循环,支持嵌套。

自定义循环
CRT示教控制系统具备强大的运算能力、极高的输出频率、大容量可扩展的数据储存空间,完全符合各种专用机及标准机发挥更高性能、更高效率的应用需求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制
+关注
关注
4文章
1011浏览量
122682
发布评论请先 登录
相关推荐
智能拖动示教喷涂机器人:技术革新与未来展望
、工作原理、应用优势以及未来发展等多个方面进行详细探讨,以期为相关行业提供参考和借鉴。 ▲CRT拖动示教喷涂系统:DMC600M 1、技术特点 集成了先进的智能

CRT激光焊接示教系统功能详解及应用场景与效益分析
在现代制造业中,激光焊接技术以其高精度、高效率和非接触式加工的特点,成为众多领域不可或缺的一部分。本文将深入探讨DMC2600M这款双工位激光焊接示教系统。这是一款手持盒示



什么是拖动示教?机器人拖动示教方式分析
多变的特点,满足制造业日益增长的复杂性要求。 机器人拖动示教,就是操作员可以直接拖着机器人各关节,运动到理想的姿态,记录下来。协作机器人是较早具有该功能的系统。这种

基于导纳控制的机器人拖动示教原理和实现步骤
(Admittance)模型描述。导纳模型类似于弹簧和阻尼器的组合,用来描述机器人对外部力和运动的响应。机器人拖动示教系统DMC600M 1. 原理 导纳模型:机器
焊接机器人示教模式怎么设置
在现代制造业中,焊接机器人广泛应用于提高生产效率和焊接质量。而焊接机器人示教模式的正确设置,是确保自动化焊接过程精确执行的重要环节。今天创想智控焊缝跟踪系统小编带大家了解焊接机器人示

VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用
始终精确对准工件的特定位置,即使在工件或工具自身旋转时也能保持恒定的相对姿态和角度。
在运动控制过程确保C轴在校准时保持零点位置。通过机械平台的水平方向角度校准来标定A轴,并进行旋转中
发表于 07-29 14:29
机器视觉控制轴运动原理是什么?
了运动控制和机器视觉系统的结合,并降低了它们的开发难度和开发成本。在设计这种系统时,了解目前的技术发展、方法以及开发工具会对您的工作提供很大的帮助。 机器视觉
基于S3C2440和专用DSP的嵌入式四轴运动控制器
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服控制。为解决精密制造对低成本、可移植性强的通用型多
发表于 05-03 10:44
•569次阅读
基于RK3568核心板的工业示教器解决方案
难的问题,且自带的监控功能可提供安全的使用保障。“示教器”是一种手持装置,广泛应用于机器人控制系统中。它通过通讯电缆连接控制柜或运动






 工商网监
工商网监
评论