 【解决方案】电机制氧-如何让电机制氧又稳又安静?
【解决方案】电机制氧-如何让电机制氧又稳又安静?
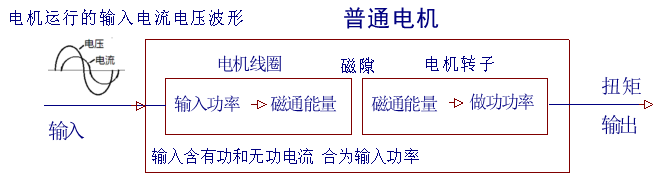
便携式制氧机使用微型电机就可制氧!本文将剖析ADRC取代PID控制电机,让便携制氧机更平稳更安静。便携制氧机,因为要随时携带,所以需要微型压缩机的速度稳定、噪声低、能效高。传统的PID算法用在微型压缩机上速度波动较大、效果一般,而ADRC算法能大幅提升性能。
 便携制氧机
便携制氧机
便携制氧机是在传统插电制氧机的基础上进行小型化。主要将传统的基于交流异步电机的压缩机,改为基于直流无刷电机的微型压缩机,工作电压在12~24V,并且使用锂电池供电,小小一个背包在身,一般可以连续4个小时以上供氧。具体工作原理请看上一篇推文:《电机制氧-剖析便携制氧机的工作原理》。
PID的原理与特点
PID算法是在1936年完整提出的,它是一种在自动控制技术中占有非常重要地位的控制方法。PID控制理论从诞生之日就和电机深深捆绑在一起,时至今日,有电机的地方,一般背后就有PID的身影,例如空调、无人机、机器人等等。
一、PID的原理下图是直流电机的PID调速系统。No(t)是期望得到的电机目标速度,N(t)是电机实际的速度,U(t)是PID控制器的输出电压。No(t)与N(t)相比较,得出的误差值E(t)=No(t)-N(t),经PID控制器计算后输出控制电压U(t),驱动电机改变速度。当实际速度偏小时,即No(t)> N(t),E(t)>0,PID控制器加大U(t)输出,电机实际速度将提高;当实际速度偏大时,即No(t)
二、PID的特点
PID控制器中有三个单元,它们的作用和特点分别是:
- P:Proportion比例,它的作用是放大误差E(t),E(t)越大输出电压U(t)越大,速度越快被修正回来,但如果误差E(t)太大,输出电压U(t)就可能过大、速度会超调(跑多了)。
I:Integral积分,它的作用是将一段时间内的误差E(t)累加起来,累加的值越大,输出电压U(t)越大,也就是如果速度长时间只存在一点点误差,P比例单元不好控制,等一段时间后,I积分输出足够大的电压,速度才被修正过来,这会有延时。
D:Differential微分,它的作用是将当前的误差E(t)和上一次的误差E(t-1)相比较,如果E(t)更大,误差就有越来越大的趋势,就增大电压U(t)将速度预先修正。
关于PID深入原理,有兴趣的读者可查阅小编编写的《车用电机控制与实践》一书。
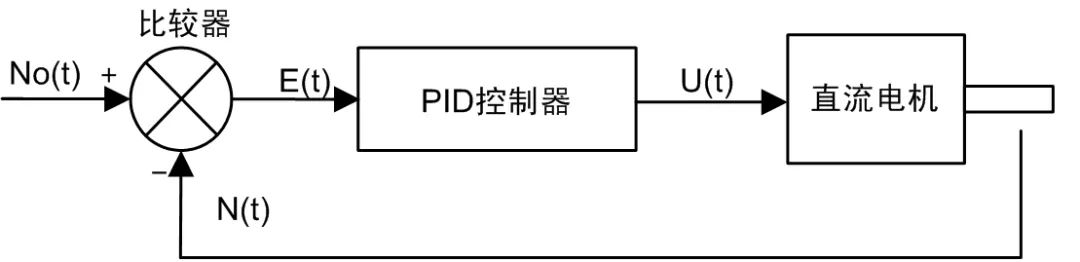
图1 PID调速原理
PID是否有“事后诸葛亮”的感觉?P、I、D中每个单元都要等误差出现才做事,没误差就不做事,误差大就调整大,误差小就调整小。这会导致控制反应慢。
ADRC原理与特点
一、ADRC的原理
干扰,或者称扰动,是指系统外部的环境出现变化,或者系统内部特性改变,最终影响了系统的性能。例如上面提到的无人机的螺旋桨,空气阻力随转速变化,影响电机速度的稳定性,这个是外部扰动;当电机长时间运行后,温度明显上升,铜线圈的电阻值升高,原来预估的给多少V电压就得到多少A电流的关系不存在了,这是内部扰动。如何实现快速抗扰动的效果,一直是自控工程中最核心的研究工作。自抗扰控制(ADRC)技术是已故韩京清研究员借鉴经典PID控制理论,在1999年正式系统地提出来的,并发表了《自抗扰控制技术》一书。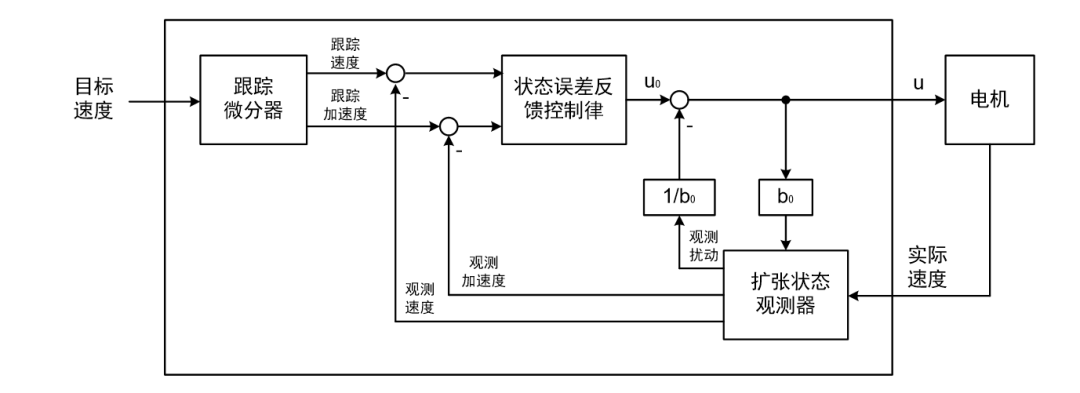 图2 ADRC控制框图ADRC的典型控制框图如上图,它主要包含跟踪微分器、状态误差反馈控制律和扩张状态观测器三大部分组成。
图2 ADRC控制框图ADRC的典型控制框图如上图,它主要包含跟踪微分器、状态误差反馈控制律和扩张状态观测器三大部分组成。
跟踪微分器
- 不单要跟踪用户给定的目标速度,还要跟踪它的变化趋势,即加速度,例如目标速度瞬间增大,不能像PID那样等到速度有误差产生了,才让D去算差多少、怎样做,跟踪微分器实时跟踪着加速度,让后面的环节立刻跟上。
状态误差反馈控制律
- 和PID控制器相当,也是根据误差输出的,只不过它不仅要控制速度误差(跟踪速度-观测速度),还要控制加速度(跟踪加速度–观测加速度),最终让这两个误差同时为零。状态误差反馈控制律的做法有很多选择,可繁可简,对于电机控制,一般使用PID的“P”比例和“D”微分就有不错的效果;P负责控制速度,让“跟踪速度”和“观察速度”相等;D 负责控制加速度,让“跟踪加速度”和“观察加速度”相等。
扩张状态观测器
- 这是ADRC的“灵魂”所在,一方面根据实际速度,观测出观测速度(理想时等于实际速度)和观测加速度,参与到状态误差反馈控制律的速度和加速度的调节;另一方面根据实际速度和控制电压U,估算出观测扰动,例如多少电压、速度就应该多少,这是已知的,如果不是这样,也就意味着有干扰,观察扰动就叠加到Uo上,调整最终给电机的电压U,让速度调整过来,其中bo和1/bo是根据驱动器调节好的比例参数。有了扩张状态观测器这个“自抗扰”的功能,就无需像PID那样“躺平”,有误差来才做事。
二、ADRC的特点
1. 速度稳定
无油空气压缩机的工作过程就是要来回压缩、排气,电机在压缩空气时遇到的阻力极大,而排气时阻力几乎为零。如果FOC采用PID算法控制速度,在这种情况下速度无法很好地稳定,而ADRC依靠扩张状态观测器,观测出扰动(阻力变化)后自动补偿,速度波动可以减低5~10倍。如下图,12V无油空气压缩机,同样工作在1000RPM(转/分), PID调速的速度波动在40~50RPM,而ADRC在3~5RPM。采用ADRC的便携制氧机,工作时的震动更小、噪声更低。
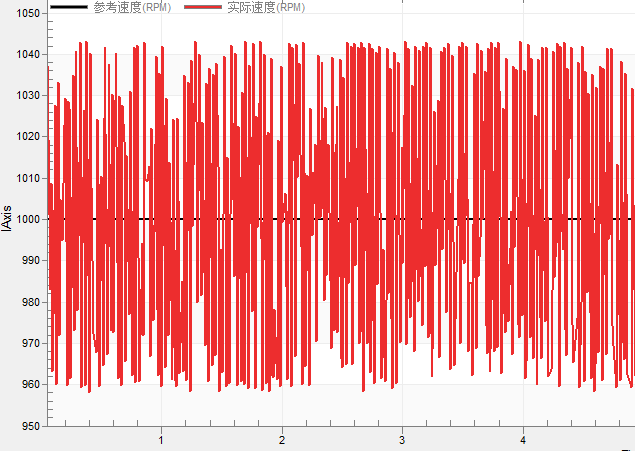
图3PID速度波动
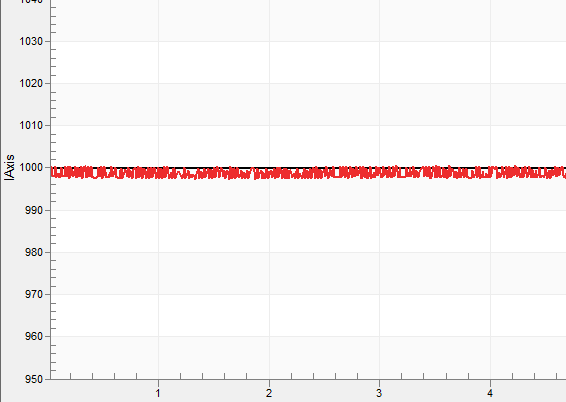
图4ADRC速度波动
2. 完美加减速
PID由于调节速度时“需要速度误差”,所以在加速或减速过程中,往往会“跑过头”,之后才“发现错误”修正回来,这个现象称为超调,并且在加速、减速的过程中,实际速度往往无法完全跟随参考速度,这个时候需要更大的电流去调节。ADRC首先依靠扩张状态观测器修正误差,然后跟踪微分器跟踪着加减速,最后采用工业的S形加减速控制,让实际速度和参考速度几乎完全重合,需要的电流也更小。下面是24V医疗风机的对比图,因为PID在加速和减速时,实际速度无法跟上参考速度,电源需要5A以上,而ADRC 实际速度和参考速度几乎完全重合,电源只需3A。采用ADRC控制算法的便携制氧机将更省电。
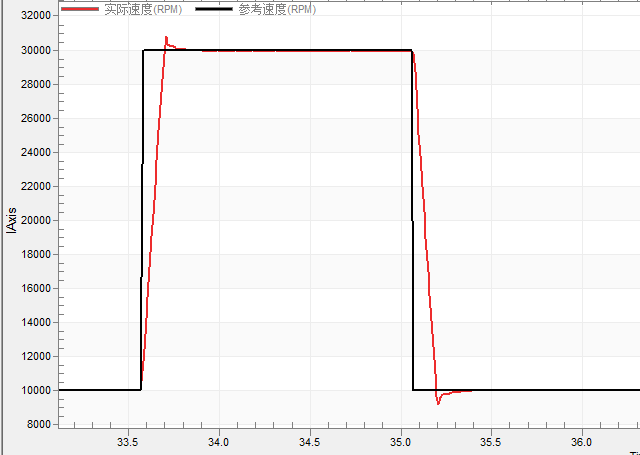
图5PID加减速
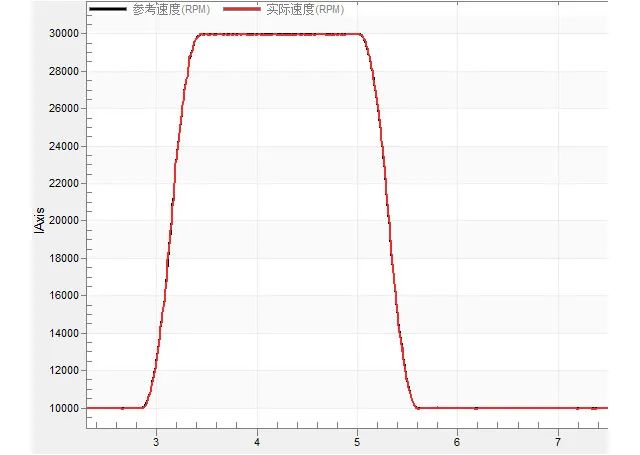
图6ADRC加减速
便携制氧机驱动板
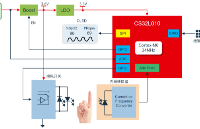
致远电子针对微型无油空气压缩机,出品了便携制氧机专用的无刷直流电机驱动板,具有以下特点:
- 优化的算法,根据制氧机深度改进的无感FOC算法,传统无感FOC算法在此运行会剧烈震动、无法使用;
- 大范围转速无感FOC算法支持低速大扭矩,能在50~3500RPM大范围转速稳定工作,制氧机能轻松实现多档位选择;其他方案一般只能在1000~3000RPM小范围转速下工作;
- 稳定的转速,ADRC算法替换传统的PID算法,在1000~3000RPM满载下,转速波动仅为5RPM左右;其他基于PID的FOC方案约50RPM;方波方案一般无法匀速,速度会受吸氧量的影响而波动;转速越稳定,震动越小,更安静、更省电;
- 优化加减速,采用工业伺服的S曲线控制加减速,换挡平顺、不抖动;
- 稳定且灵活,医疗产品级,基于高性能ARM处理器,DC12~24V/120W,1~2ms PWM脉冲输入调速,过流、过压、欠压、堵转、缺相、功率保护等等。
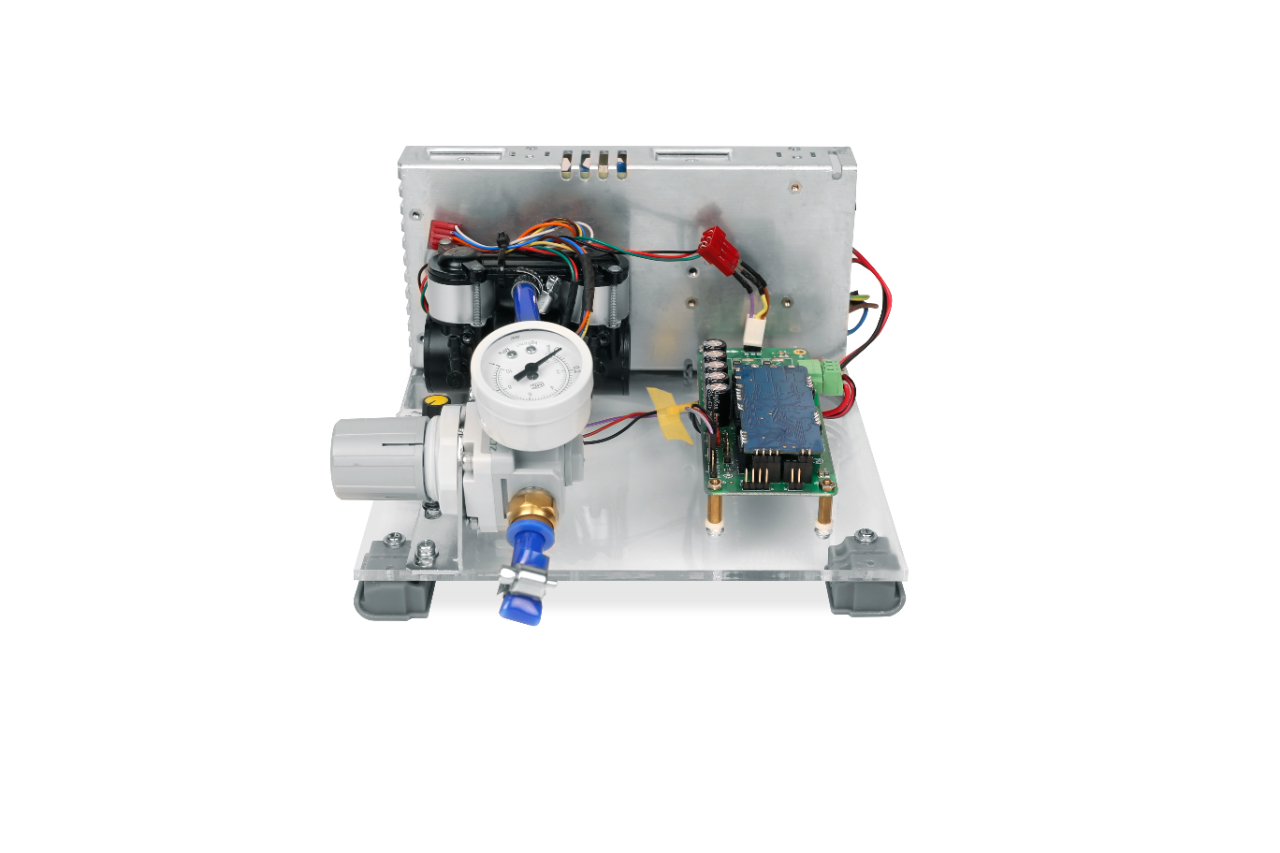 图7便携制氧机驱动板演示
图7便携制氧机驱动板演示
-
电机
+关注
关注
143文章
9137浏览量
146934
发布评论请先 登录
相关推荐
效率提升20%,噪音降低30%!智能风扇的电机驱动方案有多强?

万界星空科技电机行业MES系统解决方案
曝气增氧设备远程监控控制物联网方案
天然氧吧负氧离子监测设备:守护清新之源的科技精灵


氧传感器的工作原理是什么?氧传感器的作用有哪些?
氧传感器坏了有什么表现?氧传感器常见故障有哪些?

芯片固定环氧胶有什么优点?





 工商网监
工商网监
评论