 找方案 | 设计基于STM32G431的MCU控制卡实现小体积300W BLDC马达控制
找方案 | 设计基于STM32G431的MCU控制卡实现小体积300W BLDC马达控制
马达将电能转换成机械能,是所有各型机械负载动力的来源。马达应用的场合,软、硬式磁盘机,半导体制程设备,机密电脑数值工具机、电动载具(电动脚踏车、电动机车、电动汽车)等,均必须借由马达驱动负载达到自动化、省力、省电等目的。根据输入电源的形式,马达大致分为直流与交流两大类。交流马达大致可分为三类:同步马达、感应马达及磁阻马达。同步马达又可分为永磁式同步马达与无刷直流(BLDC)马达两类。
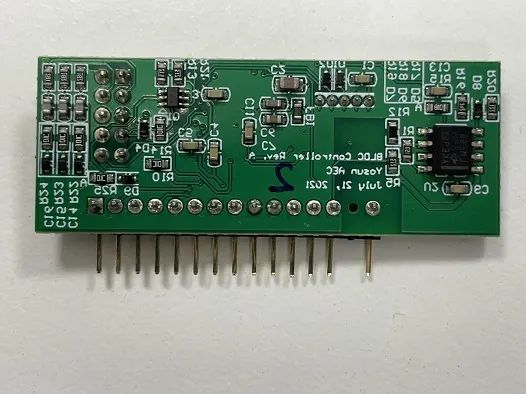
300W BLDC 驱动器控制卡及韧体撰写,采用低价位高性能之微控制器(MCU, STM32G431)完成实体制作,其中控制策略及变频器脉波宽调变法则,皆由微控制器之数位控制程式完成之。
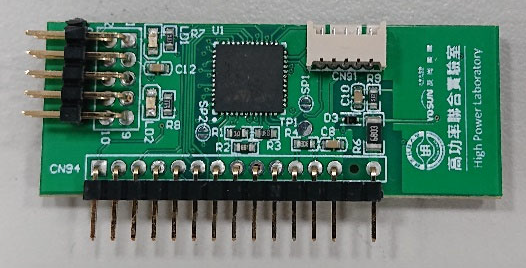
STM32G431控制卡
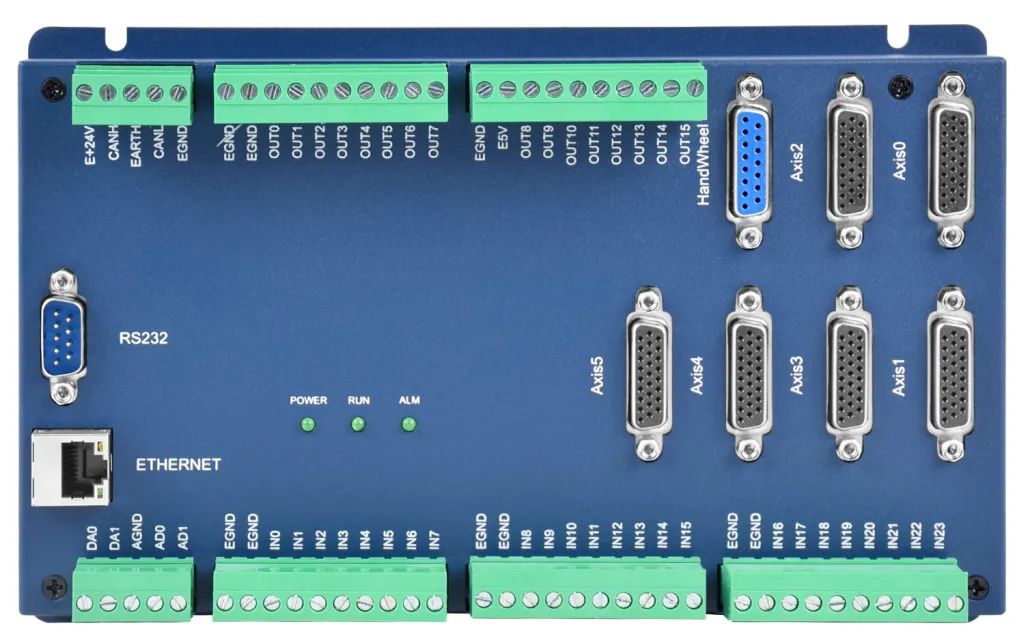
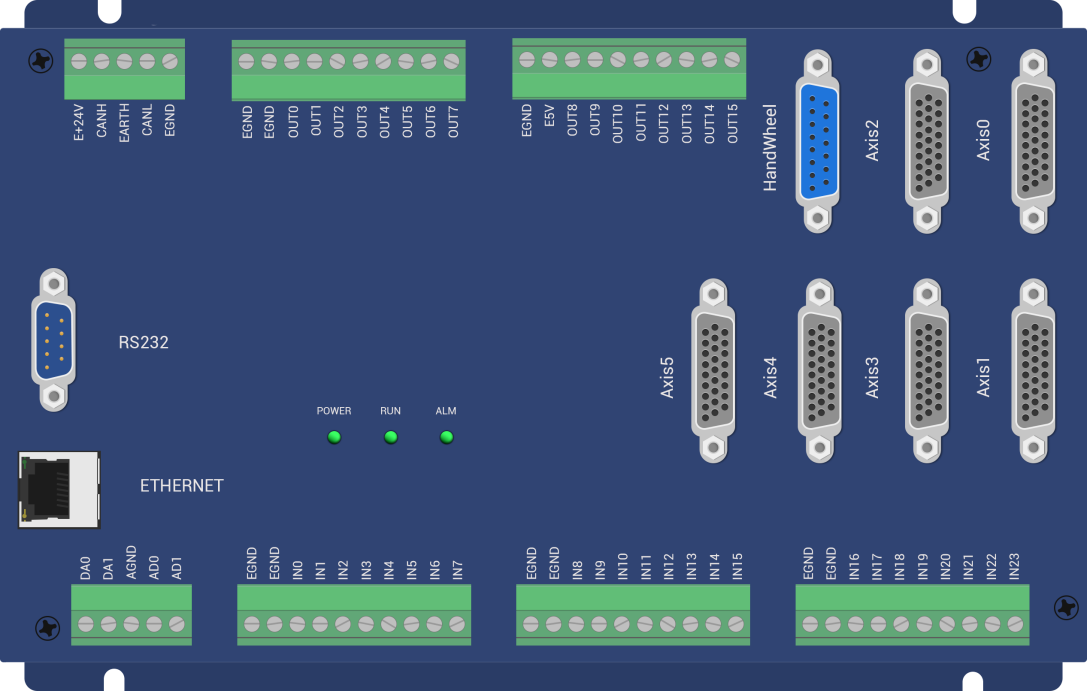
其系统架构图如下
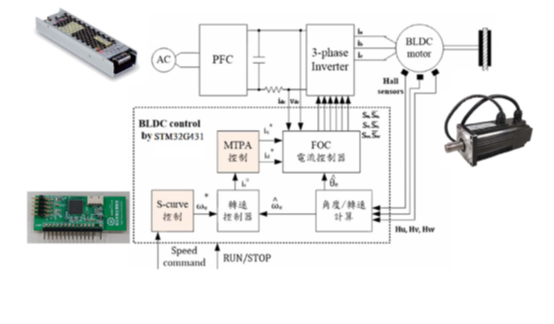
系统架构图
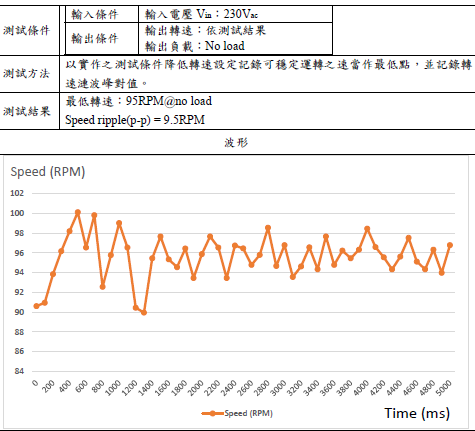
控制方块与实体图,BLDC 控制核心使用STM32G431 撰写PMSM 控制算法,并采用三个Hall-effect sensor 讯号作为马达位置回授,借此达成FOC 的控制,使马达可精确将电流输出在正确的相位,提供较小的驱动电流。
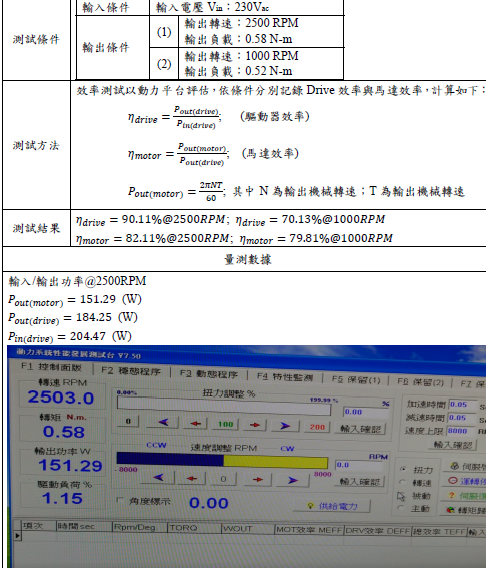
测试报告如下
效率
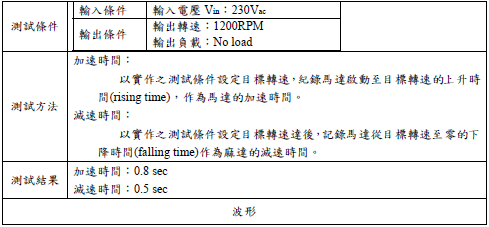
加减速时间
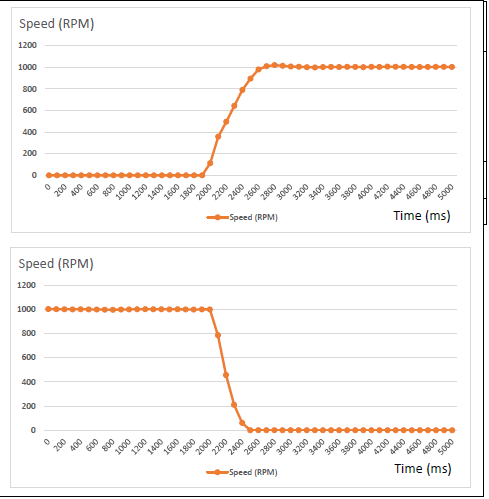
最低转速控制
►场景应用图

►产品实体图
►展示板照片
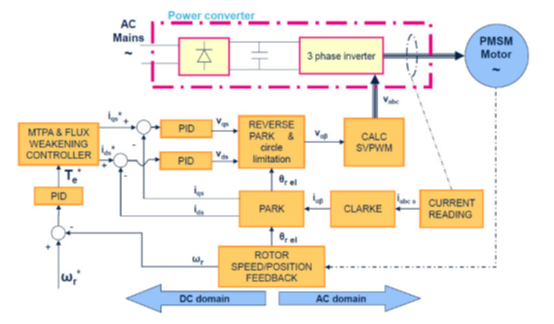
►方案方块图
►核心技术优势
MCU 系用意法半导体(ST)生产之STM32G431,此MCU 内建有类比/数位转换器,可作电流回授及类比式转速命令的输入。
也有霍尔效应感测器(Hall-effect sensor)的计数器,可作马达磁极角位置及轴转速的侦测用。
并有脉波宽度调变(PWM)功能,作为变频器的控制用,如此,将可减少硬体电路,降低成本,提高性能。
►方案规格
驱动器效率 93%@300W(drive output);
马达效率 80%@250W(motor output);
额定电流 1.2A rms;
加/减速时间 <1.5 sec (静止加速至1000 RPM@no -load );
最大驱动电流 200%额定电流可持续5 sec;
转速控制范围 100 ~ 4000 RPM;
转速调节率 < ±1.5 %(额定转速);
软体设定功能 输出转矩限制 (预设200%额定电流);
驱动器功能:
1. 转速控制及矩限制
2. 正反转控制
3. 简易加减速控制
4. 应用:工具机平台移动控制
-
mcu
+关注
关注
146文章
17140浏览量
351049
发布评论请先 登录
相关推荐

大联大推出基于Innoscience产品的300W电源适配器方案







 工商网监
工商网监
评论