 手语翻译系统系列之使用旭日X3派实时识别播报手语
手语翻译系统系列之使用旭日X3派实时识别播报手语
一、准备工作
硬件部分:旭日X3派,USB免驱摄像头,电源适配器,烧录Ubuntu系统的SD卡,USB扬声器,显示屏(或者VNC/SSH远程连接)
软件部分:Thonny IDE集成开发环境

首先,关于Ubuntu系统镜像的烧录官方有详细的教程,这里不再赘述,我自己是选择桌面Ubuntu 20.04,大家选择最新的即可。如果是第一次进入系统,记得使用命令行更新一下软件源等,使用快捷键ctrl+alt+T打开命令行,输入以下命令:
# 更新软件源 apt-get update # 更新升级所有软件 apt-get upgrade
接下来就可以开始安装Thonny IDE,作为一款轻量化的python集成开发环境,对新手十分友好,简单易上手,后续安装各种python依赖库也相当方便。安装方式Thonny官方网址提供了三种Linux的命令行下载方式,大家可以根据自己的情况进行选择。
flatpak install org.thonny.Thonny //Flatpak sudo apt install thonny //Debian,Raspbian,Ubuntu,Mintand others sudo dnf install thonny //FedoraFedora
耐心等待程序安装即可,如果中途出现异常大概率是网络不稳定导致,检查网络连接并再次运行命令行即可。由于Ubuntu系统不会自动生成快捷方式,所以安装成功后在命令行输入Thonny即可启动IDE。
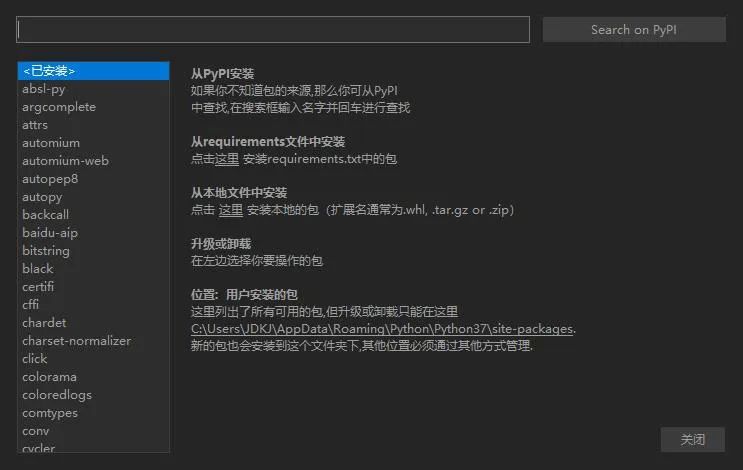
重头戏来了,安装项目依赖库。启动Thonny IDE后,选择左上方工具>>管理包,根据附件中提供的程序开始安装python依赖库。过程可能会比较漫长,这取决于当前网络情况,还有部分库文件可能会出现下载失败的情况,请耐心多尝试几次。
import os import threading import cv2 import mediapipe as mp import time import torch as t from model import HandModel from tools.landmark_handle import landmark_handle from tools.draw_landmarks import draw_landmarks from tools.draw_bounding_rect import draw_bounding_rect import numpy as np from tools.draw_rect_text import draw_rect_txt from PIL import Image, ImageFont, ImageDraw import pyttsx3 # 大家可以根据这个来添加项目依赖
(PS.cv2是opencv-python的缩写,在import的时候采用这种缩写,但添加库的时候不能直接搜索cv2,而是要打全称opencv-python。)
二、实现原理
智能手语识别系统共包括语音播报模块,模型训练模块,手势识别模块,文字转写模块,一共可识别播报“也”、“吸引”、“美丽的”、 “相信”、“的”、“怀疑”、“梦想”、“表达”、“眼睛”、 “给”、“很难”、“有”、“许多”、“我”、“方法”、“不”, “只有”、“超过”、“请”、“放”、“说”、“微笑”、“星星”、“十分”、“看”、“你”等27个国家通用手语。
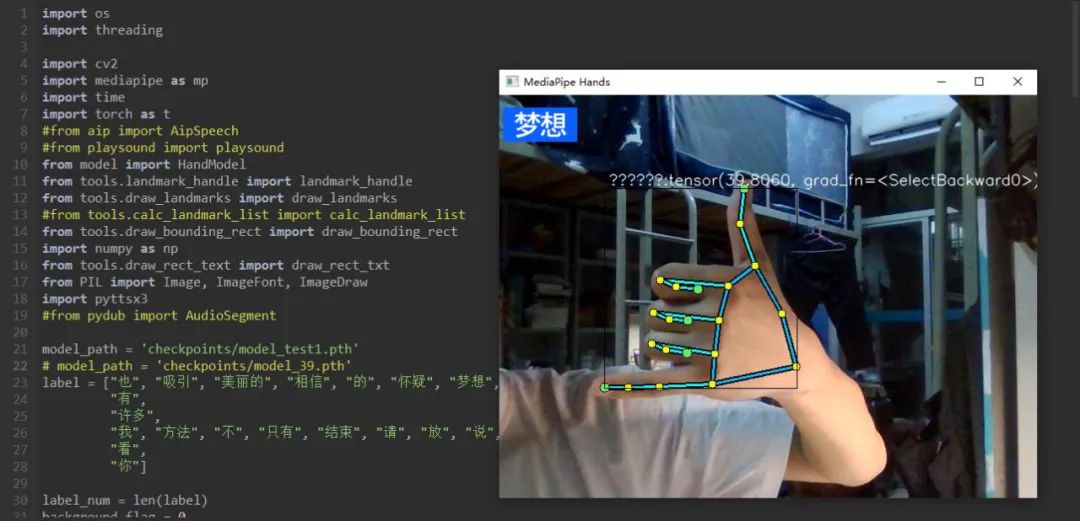
model_path = 'checkpoints/model_test1.pth' label = ["也", "吸引", "美丽的", "相信", "的", "怀疑", "梦想", "表达", "眼睛", "给", "很难","有","许多","我", "方法", "不", "只有", "结束", "请", "放", "说", "微信", "星星", "十分","看","你"]
语音播报模块采用pyttsx3第三方库,它是一个用于文字转语音的第三方python库,还可实现对音量,声源,语速的调整,可脱机工作,兼容python2和python3。
def run(): str_show = this_label star_date = open("2.txt", "w", encoding="utf-8") star_date.write(str_show) star_date.close() star_data = open("2.txt", "r", encoding="utf-8") star_read = star_data.readlines() star_data.close() file = "2.txt" res = open(file, encoding="utf-8").read() engine = pyttsx3.init() content = res engine.say(content) engine.runAndWait() time.sleep(1)
模型训练模块采用torch第三方库,torch广泛运用深度学习。它能够帮助我们构建深度学习项目,强调灵活性,而且允许使用我们习惯的python表示方法来表达深度学习模型。算力高,易学习,比较容易入门。
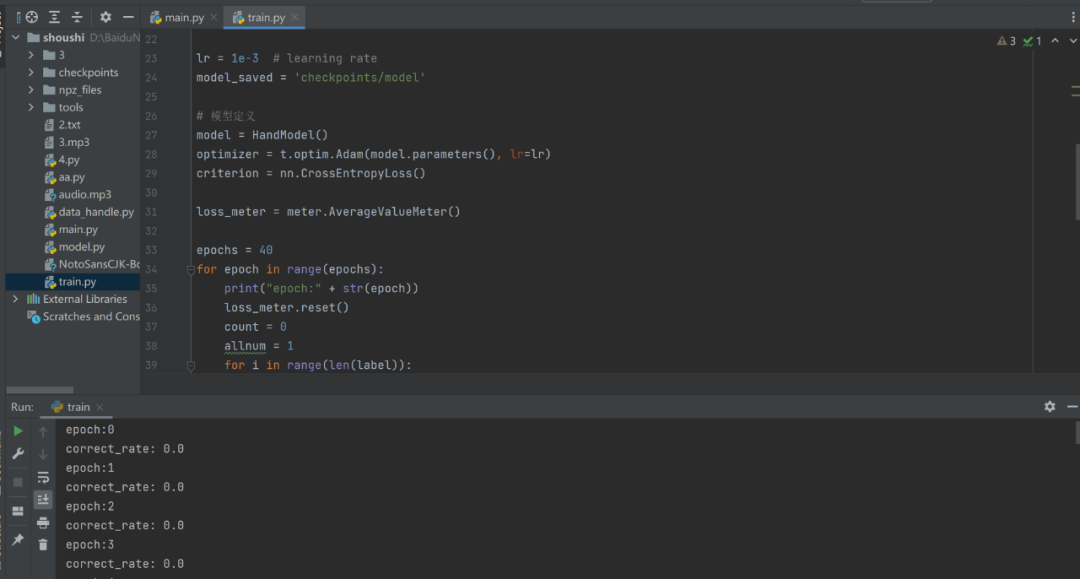
# 模型保存地址 targetX = [0 for xx in range(label_num)] target = [] for xx in range(label_num): target_this = copy.deepcopy(targetX) target_this[xx] = 1 target.append(target_this) # 独热码 lr = 1e-3 # learning rate model_saved = 'checkpoints/model' # 模型定义 model = HandModel() optimizer = t.optim.Adam(model.parameters(), lr=lr) criterion = nn.CrossEntropyLoss() loss_meter = meter.AverageValueMeter() epochs = 40 for epoch in range(epochs): print("epoch:" + str(epoch)) loss_meter.reset() count = 0 allnum = 1 for i in range(len(label)): data = np.load('./npz_files/' + label[i] + ".npz", allow_pickle=True) data = data['data'] for j in range(len(data)): xdata = t.tensor(data[j]) optimizer.zero_grad() this_target = t.tensor(target[i]).float() input_, this_target = Variable(xdata), Variable(this_target) output = model(input_) outLabel = label[output.tolist().index(max(output))] targetIndex = target[i].index(1) targetLabel = label[targetIndex] if targetLabel == outLabel: count += 1 allnum += 1 output = t.unsqueeze(output, 0) this_target = t.unsqueeze(this_target, 0) loss = criterion(output, this_target) loss.backward() optimizer.step() loss_meter.add(loss.data) print("correct_rate:", str(count / allnum)) t.save(model.state_dict(), '%s_%s.pth' % (model_saved, epoch))
准备好数据集就可以开始进行模型训练,模型推荐在电脑上进行训练,我自己的电脑是win10的系统,用的pycharm IDE的集成开发环境,如果只是想体验一下的话也可以直接使用附件里训练好的模型。
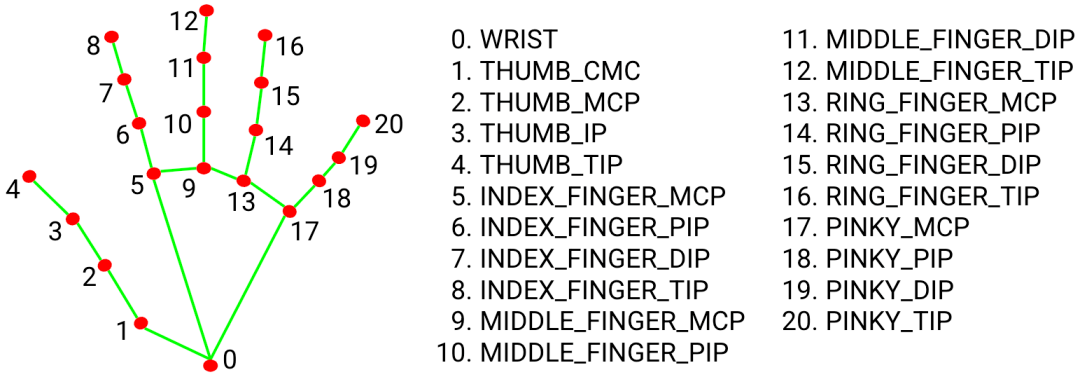
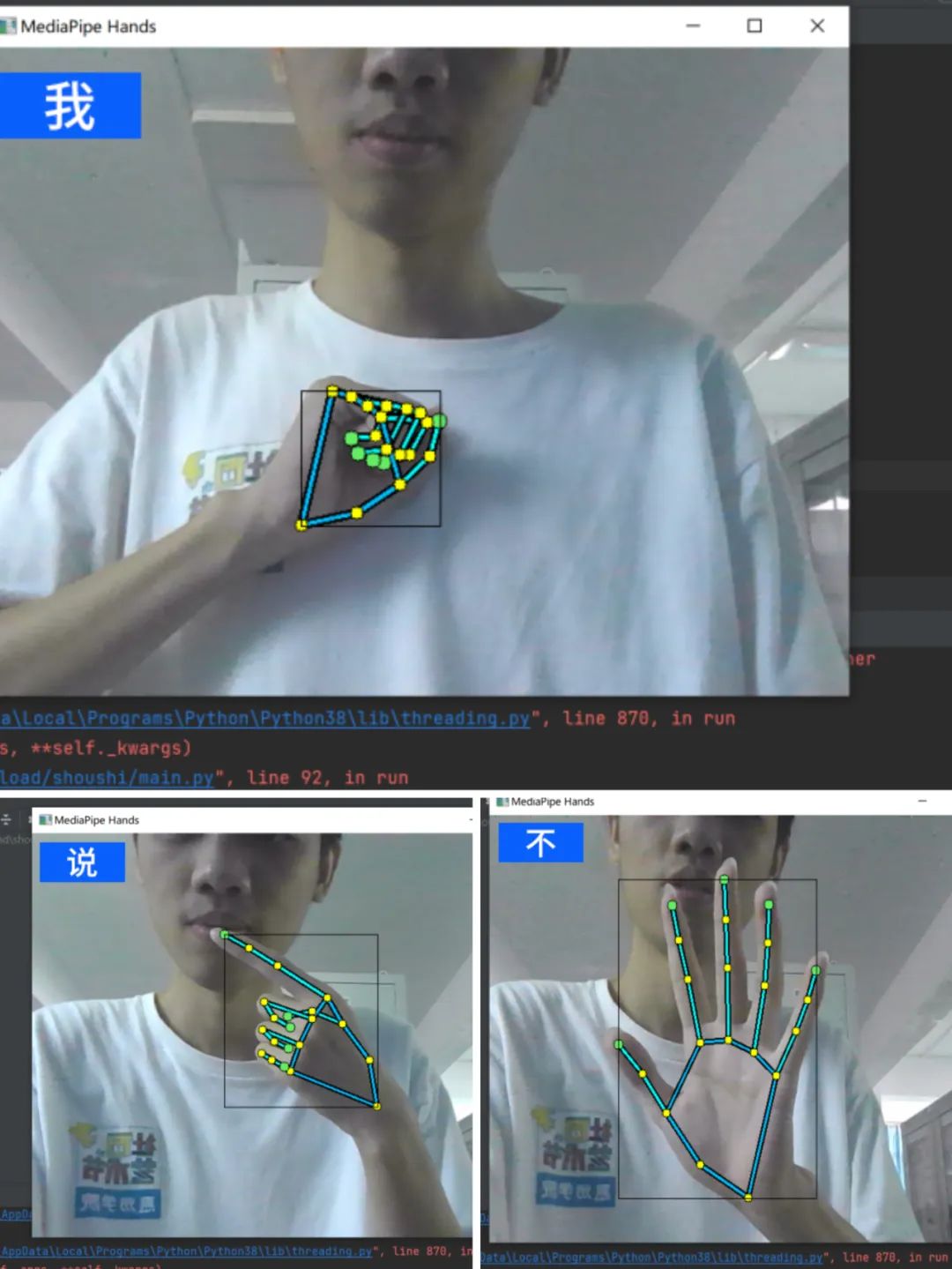
手势识别模块采用Mediapipe和OpenCV库对人手进行特征提取与骨骼绑定,旭日X3派根据摄像头捕捉的关键帧的进行特征提取,基于PyTorch模型进行推理,并将推理翻译结果显示到屏幕上,同时将翻译结果以txt文件形式进行保存和API接入后上传到百度语音开发平台,由平台进行人声的合成,然后将生成的mp3文件下载到旭日X3派终端用扬声器进行播放,实现了为语言障碍人士发声,为“碍”发声。
# 百度大脑AI开放平台API接入实现语音合成的示例 def fetch_token(): print("fetch token begin") params = {'grant_type': 'client_credentials', 'client_id': API_KEY, 'client_secret': SECRET_KEY} post_data = urlencode(params) if (IS_PY3): post_data = post_data.encode('utf-8') req = Request(TOKEN_URL, post_data) try: f = urlopen(req, timeout=5) result_str = f.read() except URLError as err: print('token http response http code : ' + str(err.code)) result_str = err.read() if (IS_PY3): result_str = result_str.decode() print(result_str) result = json.loads(result_str) print(result) if ('access_token' in result.keys() and 'scope' in result.keys()): if not SCOPE in result['scope'].split(' '): raise DemoError('scope is not correct') print('SUCCESS WITH TOKEN: %s ; EXPIRES IN SECONDS: %s' % (result['access_token'], result['expires_in'])) return result['access_token'] else: raise DemoError('MAYBE API_KEY or SECRET_KEY not correct: access_token or scope not found in token response') """ TOKEN end """ if __name__ == '__main__': token = fetch_token() tex = quote_plus(TEXT) # 此处TEXT需要两次urlencode print(tex) params = {'tok': token, 'tex': tex, 'per': PER, 'spd': SPD, 'pit': PIT, 'vol': VOL, 'aue': AUE, 'cuid': CUID, 'lan': 'zh', 'ctp': 1} # lan ctp 固定参数 data = urlencode(params) print('test on Web Browser' + TTS_URL + '?' + data) req = Request(TTS_URL, data.encode('utf-8')) has_error = False try: f = urlopen(req) result_str = f.read() headers = dict((name.lower(), value) for name, value in f.headers.items()) has_error = ('content-type' not in headers.keys() or headers['content-type'].find('audio/') < 0) except URLError as err: print('asr http response http code : ' + str(err.code)) result_str = err.read() has_error = True save_file = "error.txt" if has_error else 'result.' + FORMAT with open(save_file, 'wb') as of: of.write(result_str) if has_error: if (IS_PY3): result_str = str(result_str, 'utf-8') print("tts api error:" + result_str) print("result saved as :" + save_file) # 骨架绑定的可视化 draw_landmarks(frame, hand_local) brect = draw_bounding_rect(frame, hand_local)
文字转写模块通过旭日X3派外接麦克风进行收音,API接入后将录制的mp3文件上传,通过云端语音平台实时转写为文字后显示到旭日X3派终端的屏幕上。最后利用python的多线程将手势识别,语音播报,文字转写同时运行,至此,实现了聋哑人士与普通人的双向无障碍沟通交流。
三、效果展示
得益于旭日X3派的强大算力,系统对手势的识别展示并播报十分灵敏,画面流程度也得到保障(温馨提示:长时间运行请准备小风扇给开发板降温哦)。
四、性能测试
系统测试方案:将训练好模型导入旭日X3派中,接入电源后等待初始化完成,由小组成员们随机在镜头前做出27个国家通用手语,将翻译终端识别播报的准确率记录,同时将识别的总时长记录收集。
测试数据如下:

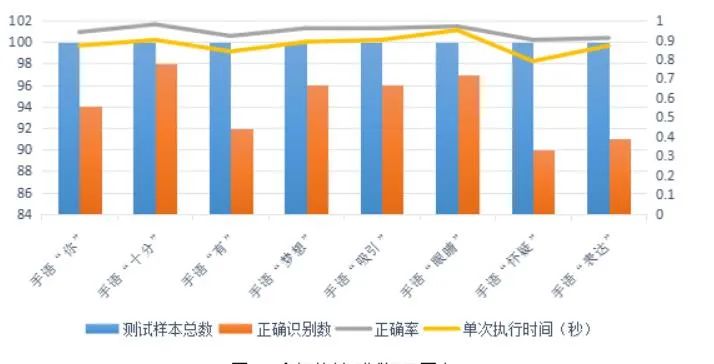
结果分析:实验数据表明,27个国家通用手语随机检验的识别准确率均在90%以上,单次执行时间也均在1秒之内。
结论:手语翻译终端有很高的实时性,充分保障聋哑残障人士的无障碍沟通交流。
本文转自地平线开发者社区
原作者:鑫辰大海王
-
嵌入式
+关注
关注
5086文章
19143浏览量
306095 -
python
+关注
关注
56文章
4798浏览量
84810
发布评论请先 登录
相关推荐
Cadence推出Palladium Z3与Protium X3系统
HarmonyOS NEXT 应用开发练习:AI智能语音播报
英飞凌AURIX™ TC3x MCU系列新增FreeRTOS支持
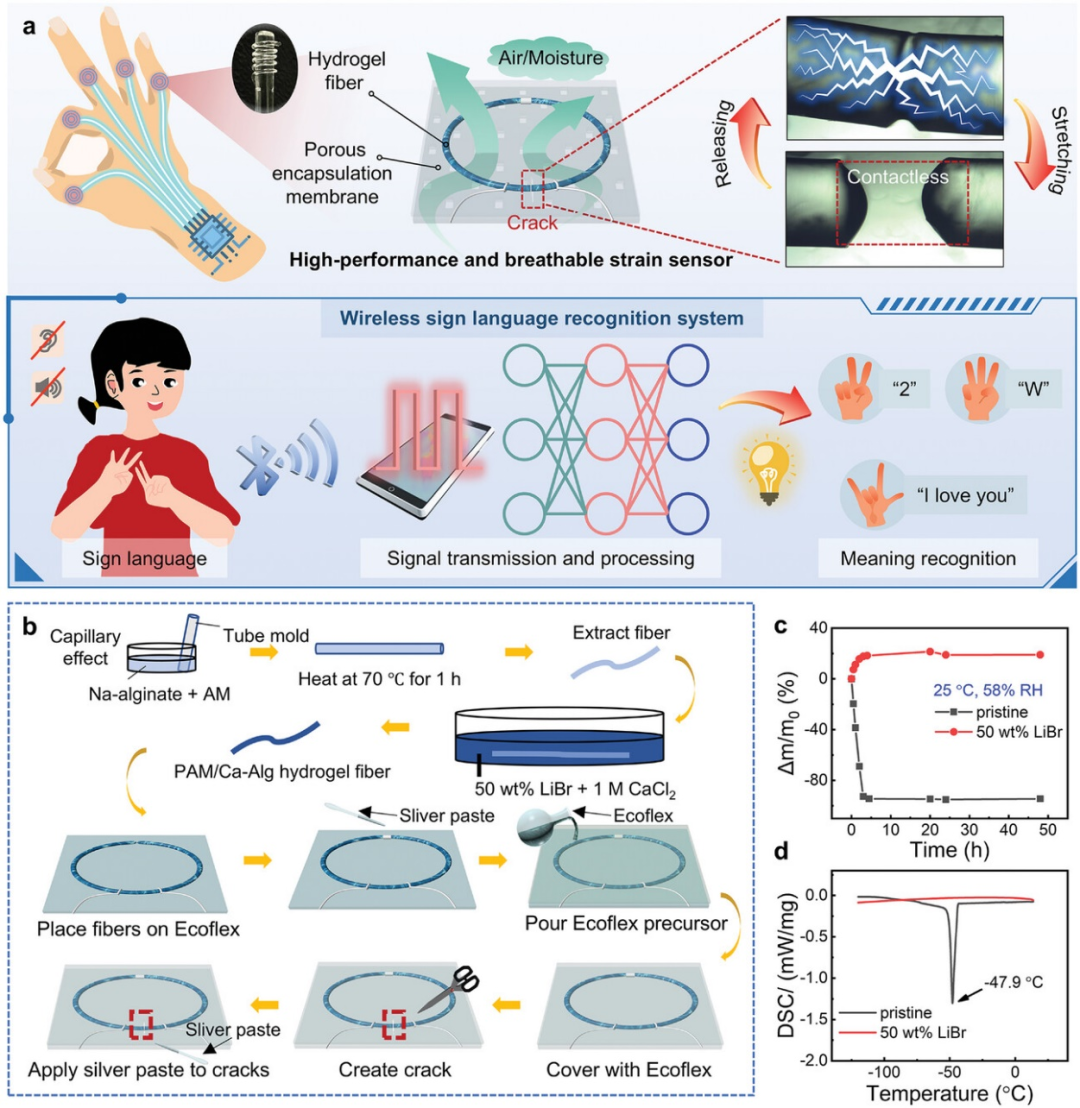
中山大学:基于定制裂纹设计的超灵敏透气水凝胶纤维应变传感器及无线手语识别应用
Simplelink™ Wi-Fi® CC3x3x网络子系统电源管理

树莓派是x86还是arm
我用香橙派做了一个Klipper 3D打印控制器
开源项目!设计一款智能手语翻译眼镜
NRK330X系列语音识别IC的功能及应用





 工商网监
工商网监
评论