 使用指南 | 微波雷达模组客户使用注意事项
使用指南 | 微波雷达模组客户使用注意事项
近几年,随着雷达技术的发展,智能化需求的旺盛,微波雷达成为半导体行业关注的焦点之一。
迎接风口,2018年觅感科技推出5.8G微波雷达模组产品线,到目前为止,已经广泛应用于智能照明,智能家居,智能家电,智能安防,智能卫浴等领域,月出货量达100万片以上。
服务客户过程中,觅感科技积累丰富的微波雷达模组应用经验,对客户所关心的各种使用问题和注意事项做了一些总结,今天截取部分问题做分享。
01
结构设计&雷达安装注意事项
微波信号遇到金属会发生强反射,该信号会给雷达引入额外噪声,同时金属也会改变天线的辐射特性,使感应距离发生变化,因此模组安装时需要特别注意。
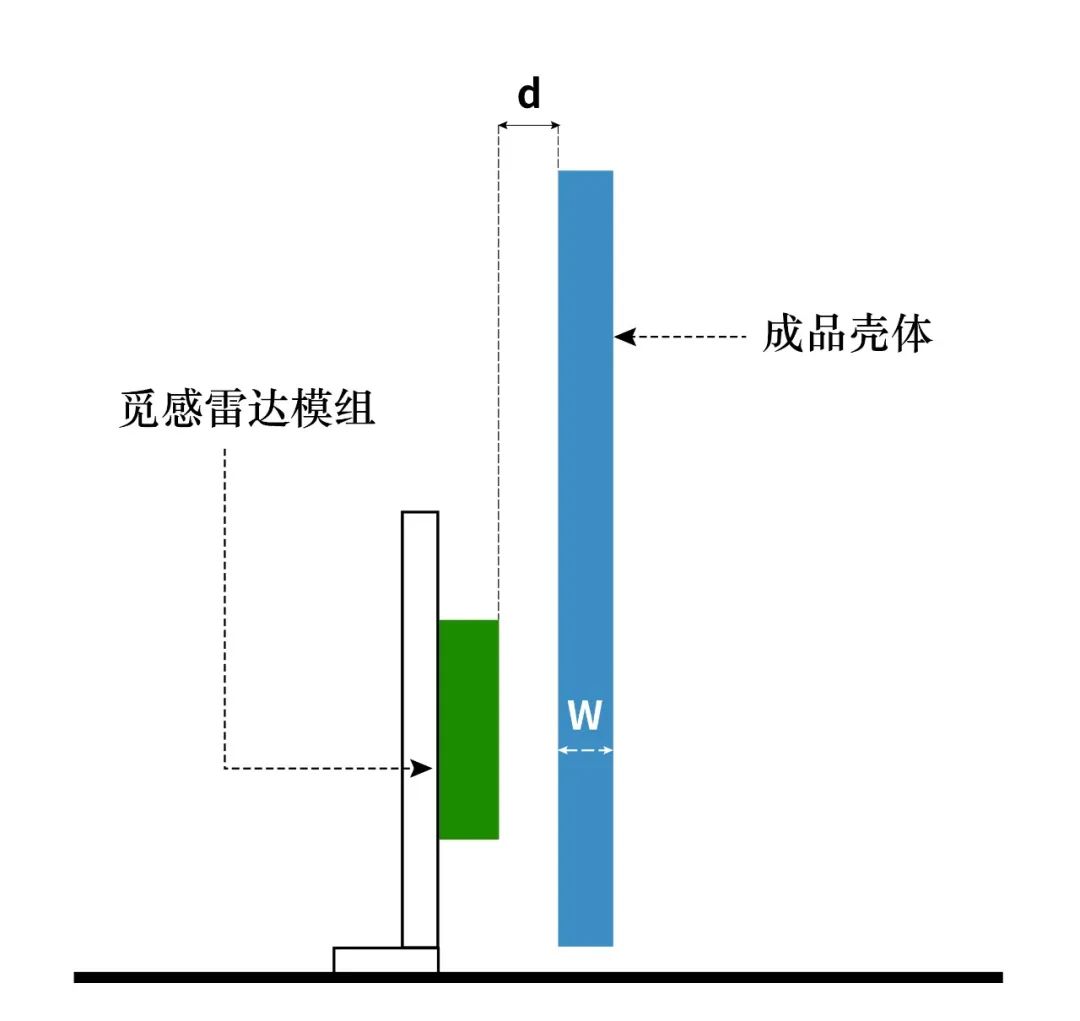
产品设计时,天线正面不能有金属材质外壳或部件遮挡。
允许有塑料或有机玻璃等遮挡物,但遮挡物不要紧贴天线,如下图所示,建议雷达模组天线到成品壳体的间距 d>3.5mm; 壳体最优厚度 W<4mm(注意:厚度每增加 3mm,灵敏度会降低 20%左右)。
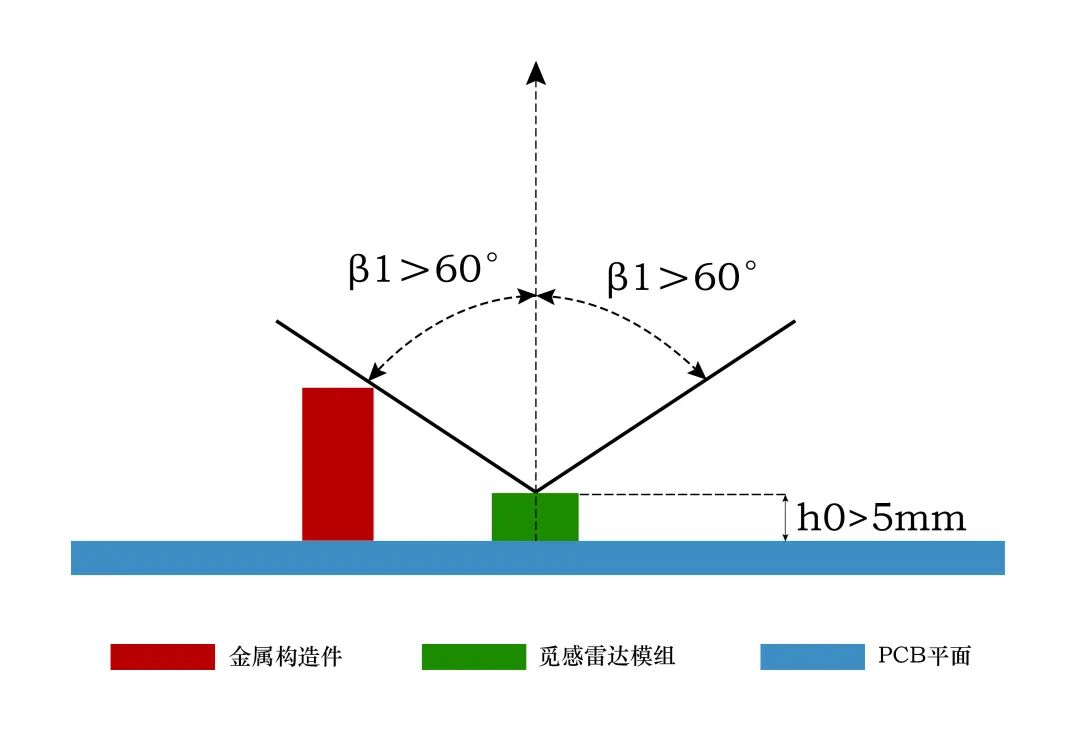
传感器安装在成品上时,如果由于产品特性有金属结构且无法避免时,注意金属结构件不能突出太多,建议元器件或金属结构件与天线辐射角度β1> 60 度(非常重要!!!),以避免感应盲区,如下图所示。雷达传感器的天线平面建议高于附近其他地平面 h0>5mm 最佳。
2
常见电源干扰&外部元器件干扰
注意事项
雷达模组供电方面需要考虑电源电压是否匹配,驱动能力是否足够以及电源的纹波大小等因素。供电电压低影响信号幅度,使得感应距离变近;驱动能力不足或纹波较大使得噪声变大,导致雷达持续误触发。
a. 如模组默认电压 5V,而辅助电源电压>5.5V,则需外加 LDO 把电压稳定到 5V。
b. 如模组工作电流约 20mA,辅助电源需具备 50mA 以上驱动能力。
c. 低频(<200Hz)纹波要求<50mV,高频(>500Hz)纹波要求<500mV。
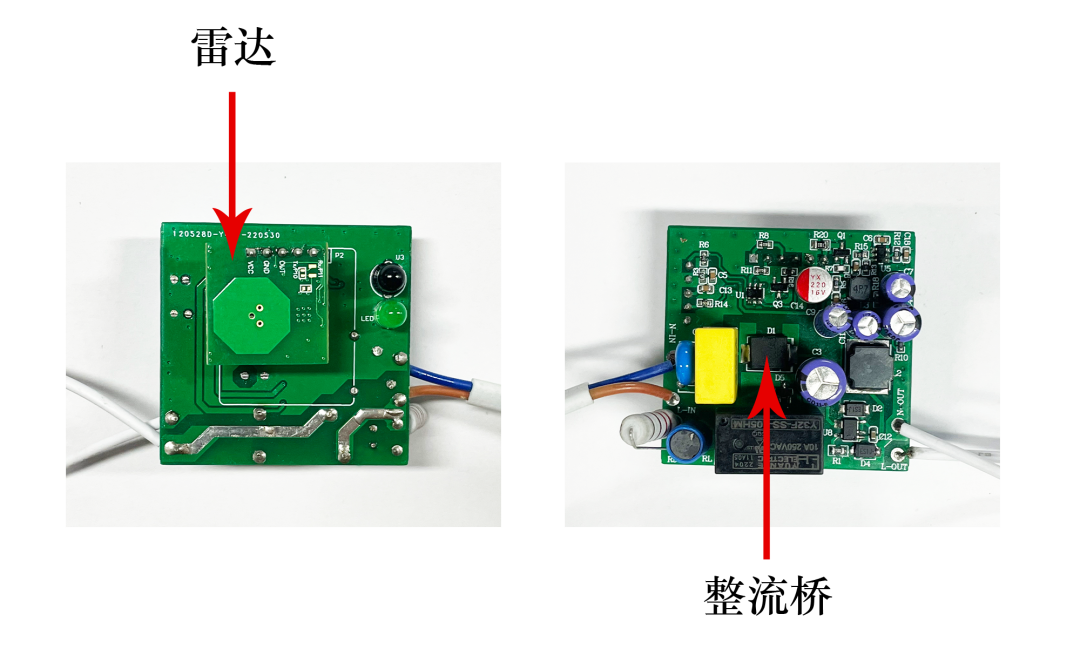
电源的工频对雷达而言是强噪声,需尽量避免工频影响。电源驱动的整流桥具有混频效应,工频信号容易混叠到雷达信号上,务必使雷达模组远离整流桥回路,软硬件可分别做如下处理:
a.对于球泡、T8 等电源驱动和雷达模组一体化的产品,在电源设计时将整流电路放在远离雷达的位置,在整体结构设计上做好屏蔽;如下图所示:
b. 软件算法可以对工频滤波,对于工频干扰很强的场景需要采用特定的软件版本;
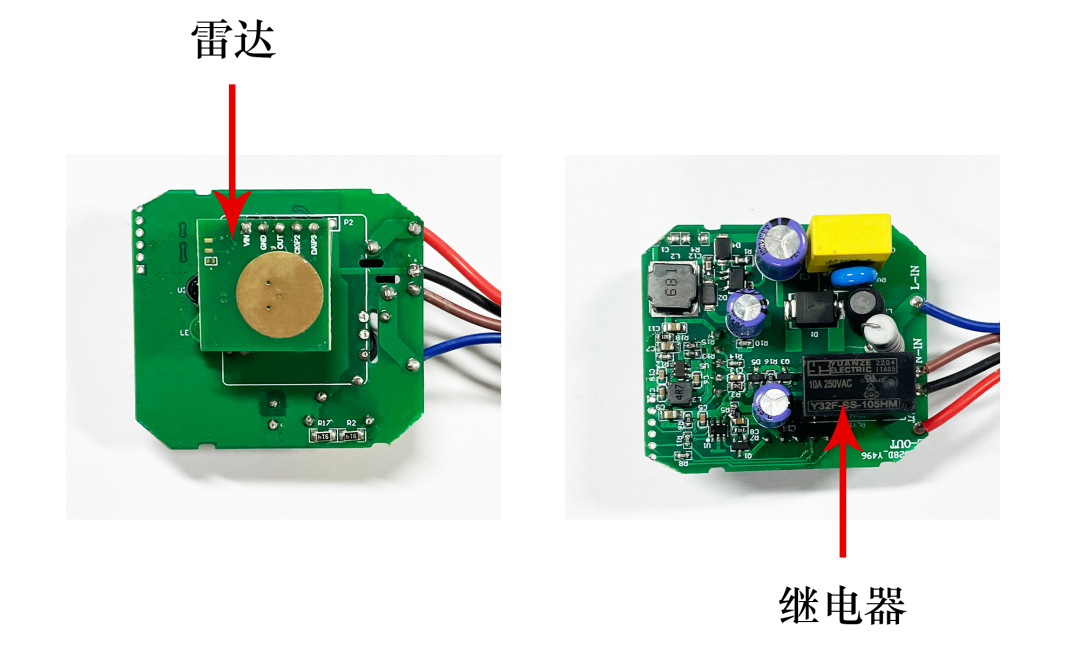
继电器的通断会形成强扰动,对雷达信号产生影响,继电器通断会在电源上产生大的扰动,同时继电器的金属弹片运动本身就是多普勒干扰,需要软硬件做相应处理:
a. 产品结构设计时将雷达传感器放在远离继电器位置,或在结构上做好屏蔽,如下图:
b. 终端软件对继电器干扰进行屏蔽处理,忽略继电器通断瞬间的雷达感应信号。
蜂鸣器开关以及指示灯闪烁对感应信号产生影响----蜂鸣器开关对电源供电产生扰动,且开关和 5.8G 信号会发生混频,指示灯也有类似问题,因此需要软硬件做相应处理:
a. 产品结构设计时将蜂鸣器和开关放在远离雷达的位置;
b. 产品软件对干扰进行屏蔽处理,忽略蜂鸣器开关和指示灯闪烁时的雷达感应信号;
3
雷达传感器和 WiFi/BT/NB 等共存
注意事项
空间上尽量错开,拉开物联网模组天线和雷达天线的间距。
时间上尽量错开,当物联网模组通讯时屏蔽掉雷达传感器的信号。
频率上尽量错开,可以通过调整雷达传感器的频率避开对应的通讯频率。
4
集成微波雷达模组的
产品整机测试&安装注意事项
微波感应雷达具有一定穿墙能力,对于薄的木墙和玻璃墙可以穿透感应,对于实体砖墙一般不容易穿透感应。
雷达传感器密集分布时,为避免互相干扰误触发,应尽量保证雷达的天线相互平行,避免相互正对照射。
整灯安装时,尽量保证各雷达感应灯相互间距不要小于 1.5m;对于老化测试等需要密集分布的场景,保证各灯之间有超过 20cm 以上间距。
感应距离是在一定测试条件下测得,实际感应距离和整灯挂高情况、测试场地空旷程度、测试人员的个头(高矮胖瘦)以及步伐走向等有关系。
避免将雷达感应产品深嵌在金属桶或金属腔体内部。
多普勒雷达是检测运动的,尽量避免将雷达传感器产品安装在空调出风口等区域以避免震动影响感应效果。
成品安装时尽量避免将雷达天线方向正对着大型金属设备或管道等。
5
应用微波雷达开发调试时需要注意
的几个关键词
增益 感应阈值 余量 探底

增益和感应阈值:增益和感应阈值是决定雷达感应距离的最主要参数,两个参数需要合理配合以达到理想的感应效果,增益实现对距离的粗调,感应阈值实现对距离的细调。
自激:自激是指在没有明显的移动物体干扰的情况下,雷达模组自己输出感应信号的现象。造成自激的原因多种多样,如:感应阈值设置过低;供电电源不稳,纹波太大;蜂鸣器、继电器等工作产生机械干扰和电源波动;电机、风扇、空调扇叶等工作影响等。
余量:余量是在调试雷达的过程中,选择的参数应该为后面的批量生产留出足够的公差,防止极限情况下雷达产生自激,因此需要探底雷达模组能够正常工作的极限参数(感应阈值)。
探底:获取雷达模组在整机中的极限参数的过程,称为探底。探底的目标是获取在某一个固定的增益下,让整机开始产生自激的那个感应阈值。
6
觅感科技在雷达推广过程积累了
丰富的应用经验和服务心得
应用落地的产品品类和产品结构非常多,涵盖了照明,开关,家电,安防,卫浴等,每个领域都有各种不同的产品品类和产品结构,大部分由觅感一对一的帮客户进行调试测试,到最后交付,提供全程的技术服务和指导。
模组型号系列多,目前在量产的模组型号多达几十种,匹配客户各种产品结构和场景需要(可联系提供产品选型手册)。
服务客户数量多达500家+,批量落地交付模组数量100W片/月+,稳定性和可靠性经过大规模市场验证。
-
微波
+关注
关注
16文章
1044浏览量
83706 -
雷达
+关注
关注
50文章
2936浏览量
117532
发布评论请先 登录
相关推荐

脉冲式充电器的使用注意事项

使用验电笔时有哪些注意事项
芯海应用笔记:CS32G020移动电源EVB用户使用指南V1.0
芯海科技 MCU 应用笔记: CSU3AF10 EVB移动电源 用户使用指南
微波炉FCC认证指南:申请注意事项解析

测速电机: 常见6大注意事项






 工商网监
工商网监
评论