 【文章转载】CANoe与DDS
【文章转载】CANoe与DDS
DDS(Data Distribution Service)是OMG组织(Object Management Group)最早在2004年发布的分布式实时通信中间件标准,旨在使用发布-订阅模式实现可靠、高性能、互操作、实时、可扩展的数据交换。
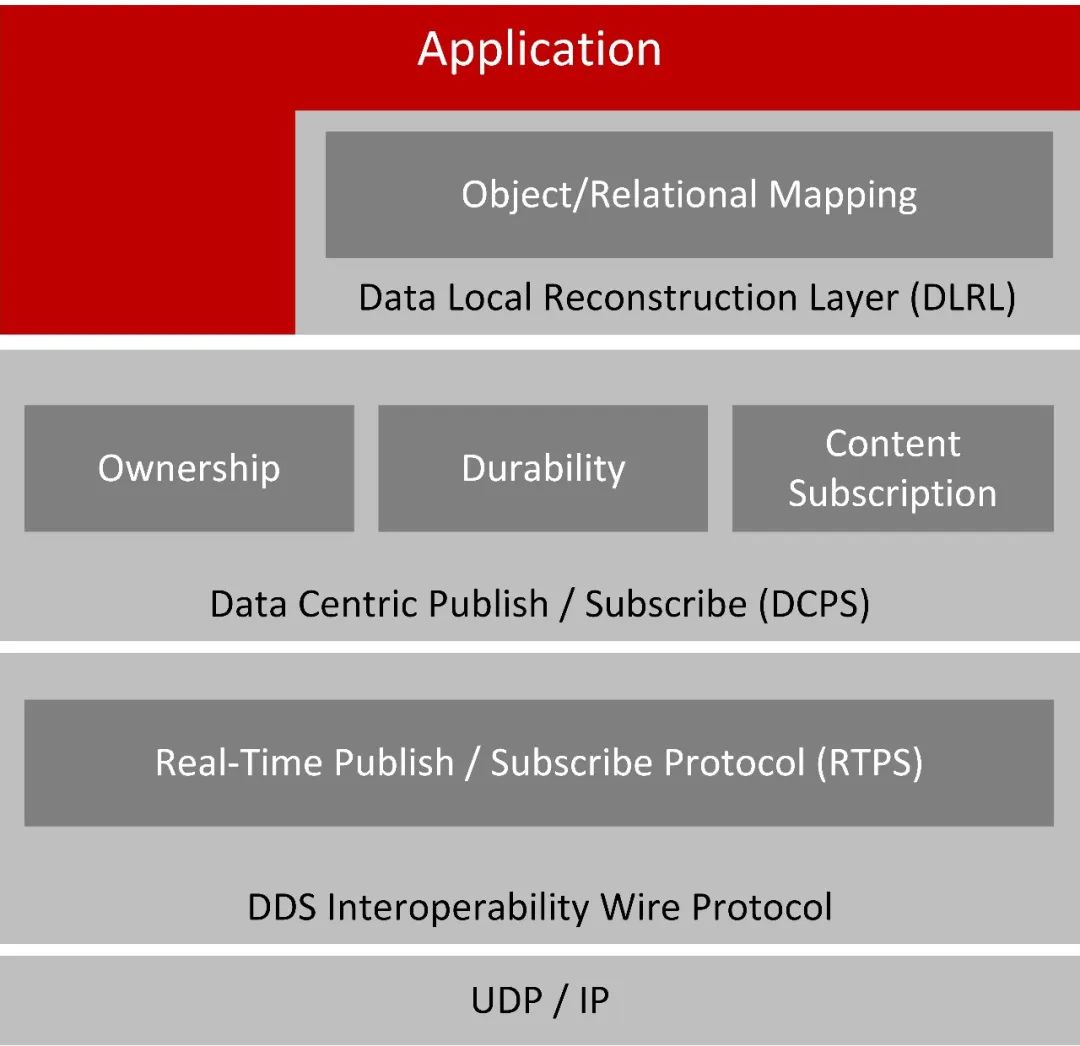
图1:DDS软件示例架构图
在汽车领域,Adaptive AUTOSAR于2018年引用DDS作为可选择的通信方式之一。DDS的实时性恰好适合于自动驾驶系统。因为在这类系统中,通常会存在感知、预测、决策和定位等模块,这些模块都需要非常频繁地高速交换数据。借助DDS,可以很好地满足这类系统的通信需求。凭借以数据为中心及丰富的QoS机制,DDS在汽车行业中逐渐受到青睐,汽车制造商及供应商将DDS作为系统中可选的通讯中间件之一,从而增强其产品的功能特性及可靠性。
DDS具有以数据为中心、即插即用、丰富的QoS等特性,这意味着DDS在网络传输中对各层级数据需要提供丰富且冗长的Header信息,方便通讯双方识别所需内容,因此对硬件及网络中的传输和数据处理性能提出了较高要求。因此在未来,DDS、SOME/IP等SOA通信中间件与车载总线类似,在车内将会是多种中间件长期共存的状态。
DDS有诸多协议规范,其中最核心的2个规范是:DDS规范和DDSI-RTPS规范。DDS规范描述了分布式应用通信和以数据为中心的发布-订阅模型,定义了应用接口(API)和通信语义,从而实现“在正确的时间向正确的地点有效可靠地传递正确的信息”。DDS规范提供了DDS核心概念在与平台无关模型(PIM)中的抽象定义,以及相对于平台专用模型(PSM)中的映射,从应用开发者视角诠释了DDS的核心定义。但是,单纯依靠DDS规范使得各DDS中间件供应商对于具体通信传输介质、行为和数据包结构有着自己的理解,若通信系统中各设备来自不同的DDS中间件供应商,其互操作性可能会存在问题。
为解决这一问题,OMG随后发布了DDSI-RTPS规范,对通信结构、数据消息结构、收发行为、服务发现进行了定义,从而保证来自不同厂商的DDS中间件的互操作性。目前纳入DDSI-RTPS规范中的底层通讯协议为UDP/IP。OMG组织目前暂未对DDS的测试规范进行定义。
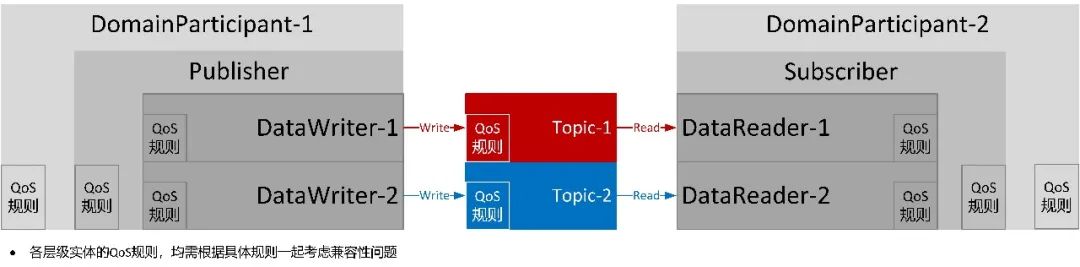
图2:DDS数据交互简化拓扑图
DDS中重要概念:
>
Domain
连接所有能够互相通信的应用程序的分布式概念,只有在同一个Domain下的Publisher和Subscriber能够互相通信,不同Domain的应用程序不知道彼此的存在,Domain通过DomainID进行区分。Domain中包含了DomainParticipant,后者代表了同一个Domain下参与通讯的应用程序,同时也是Publisher、Subscriber、Topic的工厂。
>
Topic
Publisher和Subscriber互相通讯的数据本身,其名称(Topic Name)在一个Domain中是唯一的。
>
DataWriter
基于绑定的Topic,由应用程序发送数据的实体。1个DataWriter隶属于1个Publisher,同时1个DataWriter对应于1个Topic。
>
DataReader
可使应用程序声明期望的Topic数据,以及访问Subscriber收到的数据。1个DataReader隶属于1个Subscriber,1个DataReader对应1个Topic。
>
Publisher
负责发布实际Topic数据的实体,可以创建及配置多个DataWriter并绑定相应若干Topic。
>
Subscriber
负责接收订阅Topic数据的实体,可以创建及配置多个DataReader并绑定相应若干Topic。
>
QoS
服务质量(Quality of Service)是控制DDS服务的一系列特性。Topic、DataWriter、DataReader、Publisher、Subscriber以及DomainParticipant各实体均可配置其各自的QoS规则,这些QoS互相存在兼容性检查。若通信双方QoS不兼容,则无法建立通信。目前DDS v1.4版本规范定义了Durability、LiveLiness、Reliability、LifeSpan、History等QoS机制。
CANoe中开始支持DDS
随着DDS开始在汽车电子领域的应用,Vector应客户需求在CANoe 16 SP3版本中开始支持DDS的仿真、分析与测试。DDS的通讯模型基于CANoe中的Communication Concept(ComCo)实现。
基于CANoe建立DDS的仿真和解析工程环境,可以充分利用CANoe及其测试工具链现有的优势特性:
>
CANoe是汽车电子、IoT、航空航天等多领域仿真及测试的一站式整合平台,支持CAN、CAN FD、CAN XL、LIN、FlexRay、SOME/IP、AUTOSAR PDU(CP/AP)、DoIP、CCP/XCP、NM网络管理、UDS、Cyber Security(SecOC、TLS/DTLS、IPsec、MACsec等)、E2E、全球充电协议、MQTT、HTTP、WLAN、BLE等多种总线和协议;
>
>
支持SIL/HIL、通信路由、网络仿真、数据分析/记录、诊断/刷写、电源管理、I/O控制等多种场景;
>
极具性价比的测试设计及测试脚本开发环境——vTESTstudio;
>
无缝耦合整车动力学模型及ADAS场景仿真模型工具DYNA4,或基于FMI/FMU、FDX、XIL API、COM、SIL KIT整合第三方测试工具链;
>
匹配汽车电子敏捷开发流程的CI/CT工具链体系。
如何在CANoe中创建DDS仿真及解析工程?通过下图新建Distributed Objects工程:
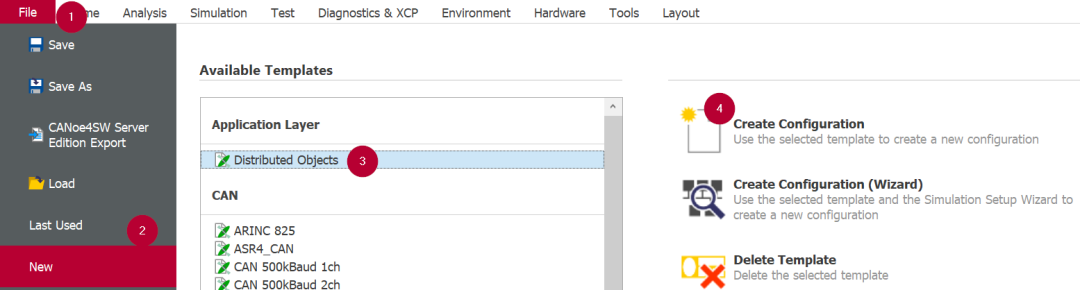
图3:新建CANoe DO工程
而后可在主界面中看到Communication Setup界面,该界面也可通过CANoe上方标签页Simulation下打开。随后依据下图指引新建DDS通信接口描述文件vCDL:
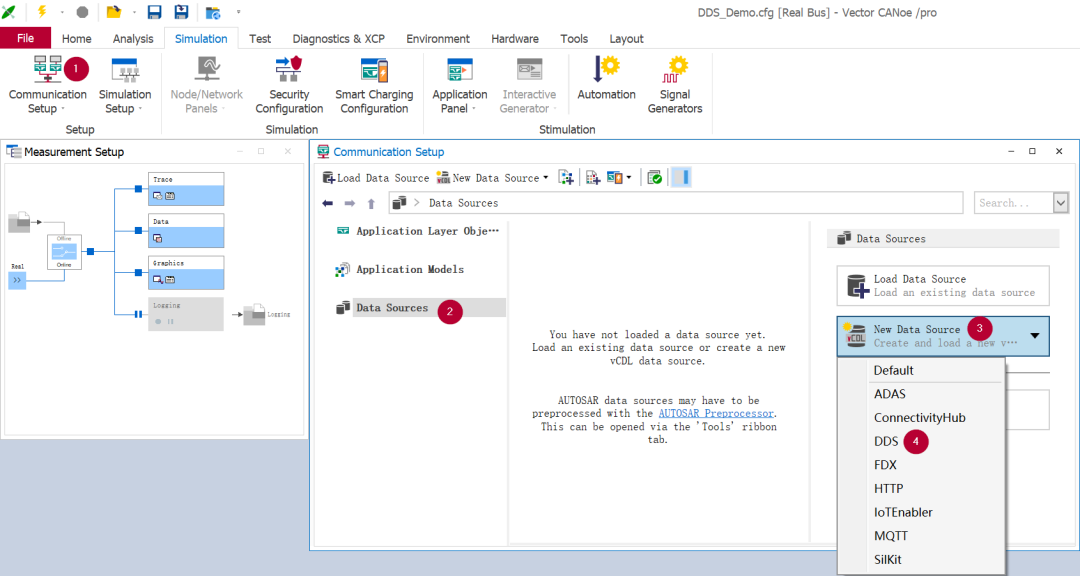
图4:新建DDS通信接口描述文件
在选择vCDL文件保存路径及文件名后(注意路径及文件名不能包含中文及特殊字符),依据下图指引打开编辑:
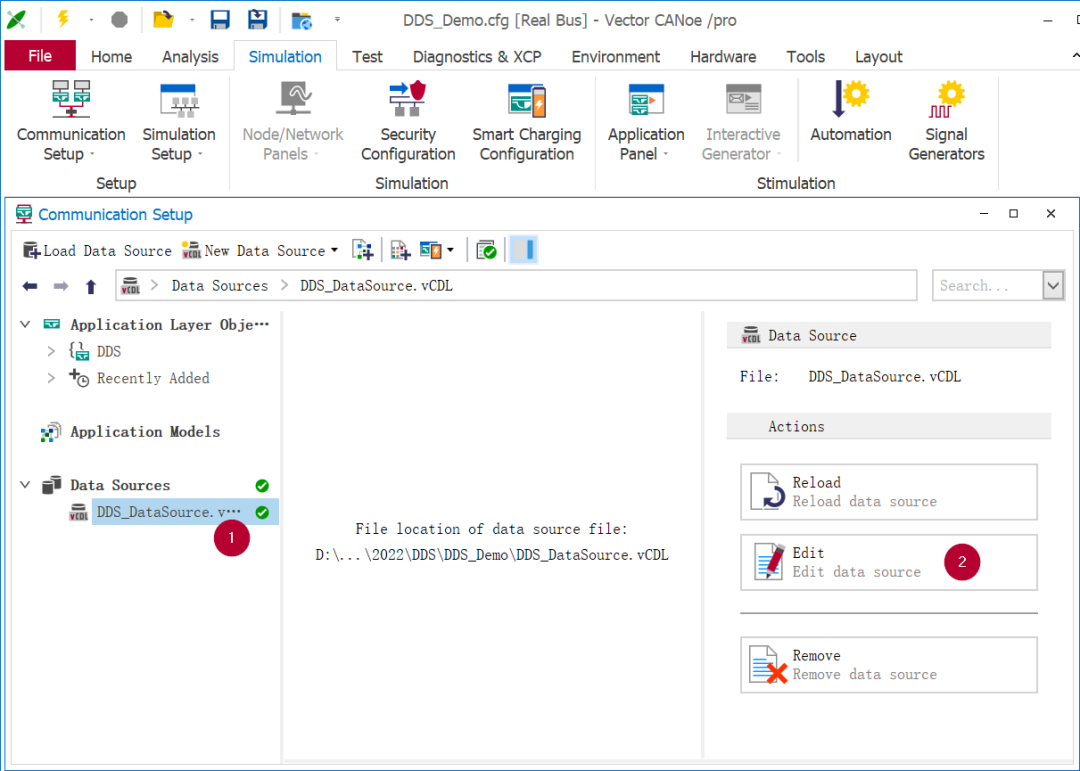
图5:编辑DDS通信接口描述文件
vCDL语言(Vector Communication Description Language)作为在CANoe Communication Concept中用于描述通信对象的语言,通过Distributed Objects(DO)对DDS的数据对象进行定义。DO的consumed value对应DDS DataReader;provided value对应DDS DataWriter。
以下图示例说明:
定义结构体作为Topic Type(即HealthData);
在interface(即IMonitor)中将该结构体作为consumed value(也可作为provided value)并进行实例化(即healthData),从而隐式声明DDS DataReader,另显式声明名为“/Monitor/healthData”的Topic;
最终对该interface(即IMonitor)分别实例化为Monitor和Sensor,作为Subscriber和Publisher;
其中Sensor的类型为reverse,代表依据IMonitor中的consumed value(即healthData)反向作为provided value。
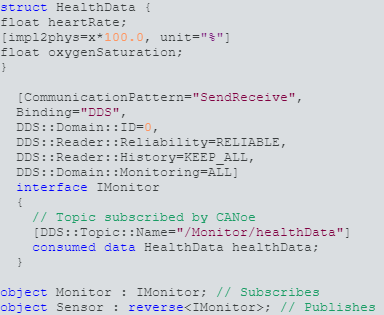
图6:vCDL中对DDS的通信接口定义示例
vCDL DDS的结构体中可以包含如下数据类型:uint或int(8、16、32、64bit),Bool,Double,Float,String,Struct,Array,List,Bytes等,并在逐渐完善中。CANoe Help文档中提供了DDS IDL数据类型与vCDL数据类型的详细对应关系。
当前版本的vCDL中,可对consumed value(DDS DataReader)和provided value(DDS DataWriter)进行QoS规则设置,包括:Reliability、History、Durability、Lifespan、Liveliness,更多的QoS规则会在CANoe后续版本中完善。
其他对于DDS Binding时的属性配置可参考详情:CANoe 16 SP3 Help文档中的“Distributed Objects (DOs) for Data Distribution Service (DDS)”页面专题。
当完成DDS的通信接口描述文件创建后,CANoe会自动生成若干观测事件及数据对象,包括DataWriter和DataReader的匹配/不匹配事件信息、服务发现信息、数据Sample信息、Built-in Topic信息等,以DO体现。
用户可在“.. \Sample Configurations 16.3.110\Connectivity\DDS\DDSBasic”中了解DDS Demo示例工程。该工程运行后,在Trace窗口可查看详细的DDS仿真和解析数据内容。
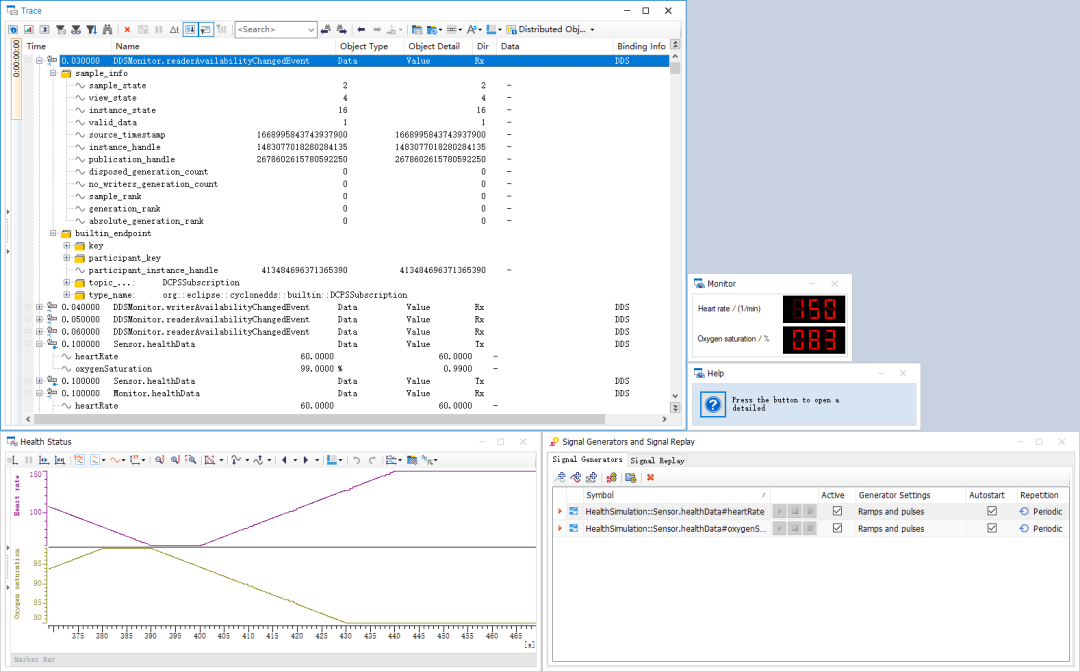
图7:CANoe中DDS工程运行状态
由于DDS协议簇范围广,存在较多用户自定义实现,除去当前针对ECU仿真及测试需要的DDS功能支持外,也满足ROS2集成的功能。更多DDS功能将在后续CANoe版本中完善。
-
CAN
+关注
关注
57文章
2756浏览量
463899 -
DDS
+关注
关注
21文章
634浏览量
152728
发布评论请先 登录
相关推荐
DDS通信中间件——DCPS规范(下)

Xilinx DDS IP核的使用和参数配置
dds数字频率是怎么合成的 DDS数字频率信号发生器的设计
dds输出频率与时钟的关系
DDS通信中间件——DCPS规范(上)
车载通信与DDS标准解读系列(5):DDS-Security


新功能上线!德思特为您详解AWG多音DDS模式!

CANoe中Logging模块使用方法及妙招

CANoe新版本18正式发布
DDS协议测试实践及问题分析






 工商网监
工商网监
评论