 【文章转载】应用VX实现加特兰雷达原始数据采集
【文章转载】应用VX实现加特兰雷达原始数据采集
01/
挑战
在快速发展的汽车自动驾驶和驾驶辅助(ADAS)领域,毫米波雷达因其全天候和出色的测速测距表现被广泛应用。加特兰微电子(Calterah Semiconductor)作为国内CMOS工艺毫米波雷达芯片开发与设计的领导者,其量产的汽车级全集成毫米波雷达SoC芯片,为客户提供高性能和小型化的选择。
在雷达应用的开发前期,采集雷达的原始数据用于算法迭代变得越来越重要。一方面,历史项目的数据需要有效地复用到新项目中,加速系统的开发验证;另一方面,出于安全要求的验证需求,高覆盖率测试也必不可少。
Vector开发的新型接口硬件可以适配加特兰雷达芯片,可采集来自雷达单片微波集成电路(Monolithic microwave integrated circuits ,MMIC)的雷达原始数据,能同时满足实验室集成和车载路试的环境要求。
图1:加特兰毫米波雷达芯片
02/
基本原理
2.1 雷达原始数据
雷达的基本原理是通过叠加发射和反射的毫米波信号来计算提取目标的距离、速度和角度信息。
雷达通常包括天线、MMIC单元(单片微波集成电路)和数字信号处理(DSP)单元,其中MMIC负责毫米波信号的调制、发射、接收以及回波信号的解调,接收数据为采样率高达50MSPS的高速数字采样(ADC)原始数据,然后送到DSP单元做快速傅里叶变换(FFT)得到目标等信息。
目前主流的毫米波雷达都是采用调频连续波(Frequency Modulated Continuous Wave,FMCW)波形,它是一段中心频率在24GHz(短距探测)或者77GHz(长距探测)的扫频连续波,频率随时间上升或者下降,扫频带宽在几GHz。每隔一定时间会空闲一段时间用于DSP计算目标等信息。这种波形也被称作啁啾信号(Chirp Signal)。
通过MMIC采集实际发波和回波经过混频器混频得到的中频信号Intermediate Frequency(IF),频率在几百MHz,数字采样和信号处理成本较低,这就是雷达原始数据。
2.2 RIF接口(Radar Interface)
在MMIC和DSP之间会预留一个对外接口用于调试,这个接口可以输出雷达的原始数据,并且定义了简单的数据传输协议,称为RIF接口(Radar Interface)。RIF接口在物理上通常是2到4对 LVDS通讯,每通道最高900 Mbit/s。
Vector针对Calterah CAL77 S244-AE开发了一款紧凑的转接板VX1522.01 GMSL2 POD可接收来自雷达的原始数据。
图2:VX1522.01 GMSL2 POD
2.3串行解串技术
RIF接口通讯距离和抗干扰能力有限,因此还需要通过POD将信号串行化再传输给接收端。GMSL2是一种传输的串行解串协议,在摄像头领域已经广泛应用。
VX1522.01 GMSL2 POD选择将RIF信号串行化成GMSL2信号,再通过VX1161.51D板卡解串还原数据。数据采集的上位机软件是CANape,可同时采集其他传感器和总线信号。
关于VX1522.01 GMSL2 POD 和 VX1161.51D板卡更多信息可以查看VX1000官方手册:www.vector.com/vx1000-manual(可点击文末阅读原文链接)
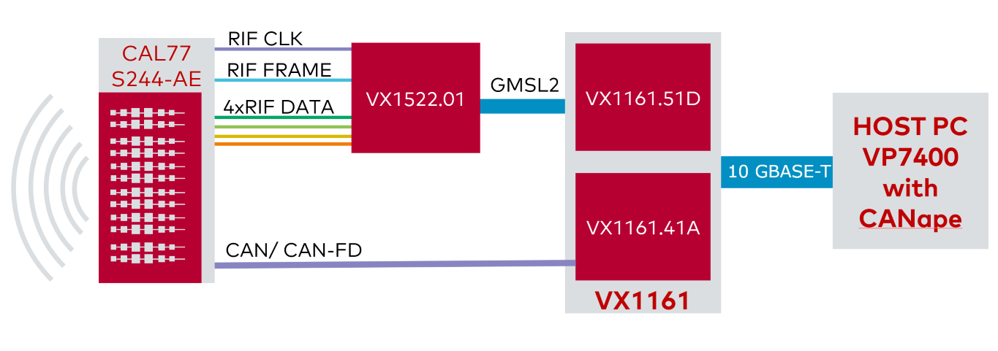
图3:采集方案
03/
系统配置
VX1161是可灵活配置的多通道数据采集接口设备,根据被采集对象的接口选择不同的板卡。单块VX1161.51D可同时采集4路雷达的原始信号,VX1161.41A/B可采集来自雷达ECU的CAN总线目标信号。
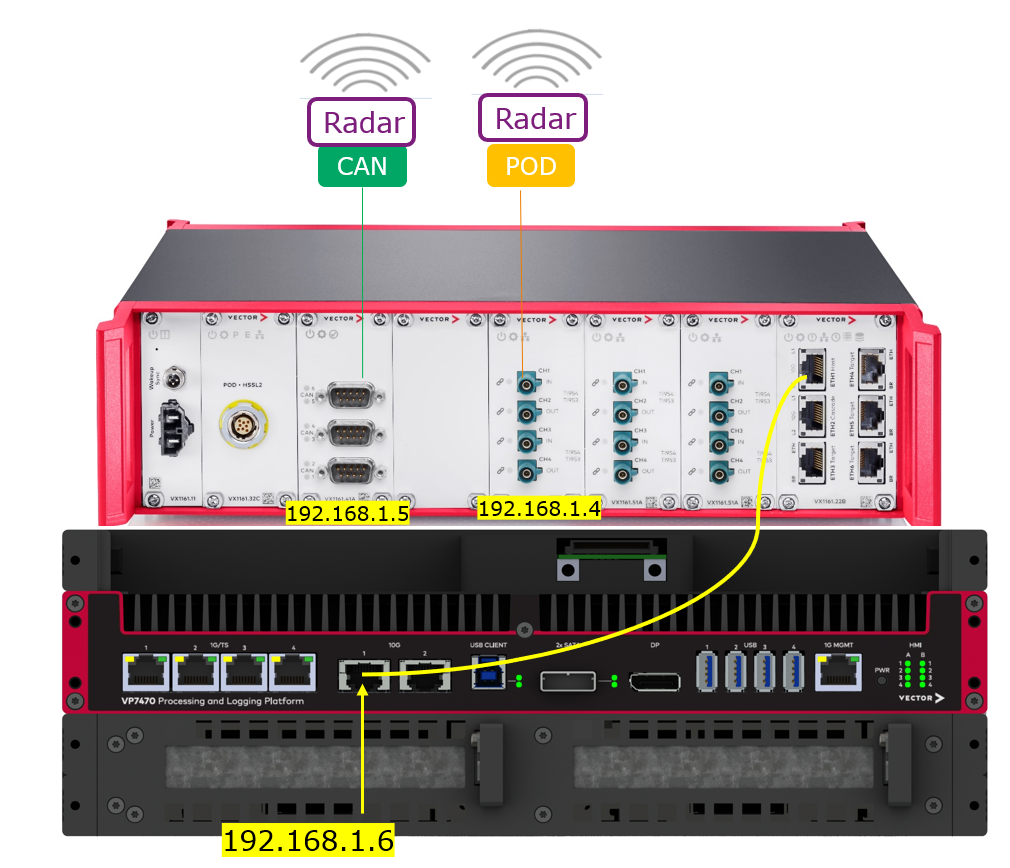
图4:硬件系统连接
3.1VXconfig配置
在VXConfig配置工具中分别配置VX1161.51D和VX1522.01的接口类型即可。
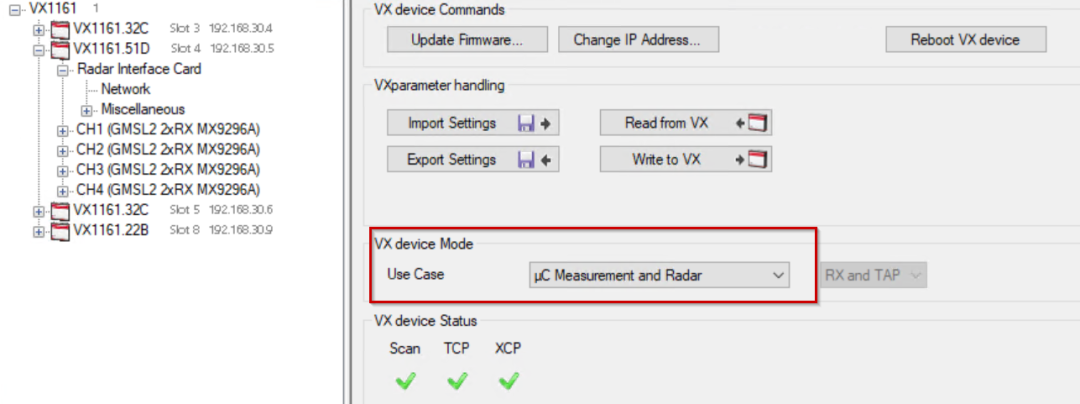
图5:VX1161.51D 配置
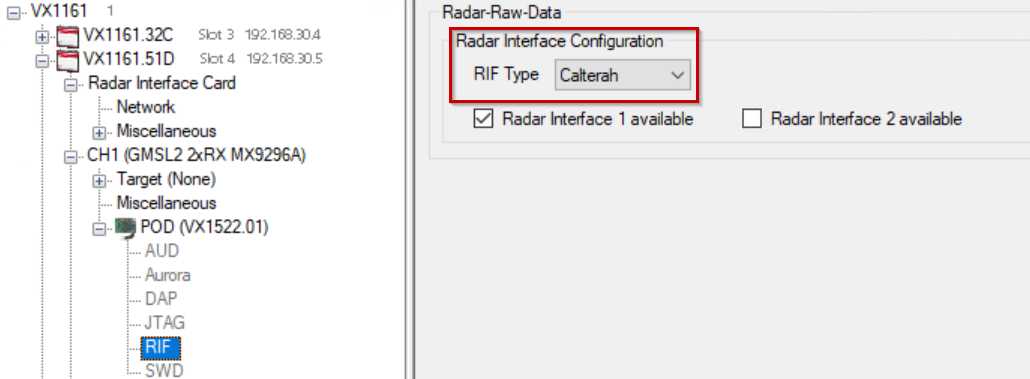
图6:VX1522.01 POD配置
3.2CANape配置
在CANape中只需要新建一个雷达原始数据的设备并关联VX1161.51D采集板卡的IP地址和物理端口即可。
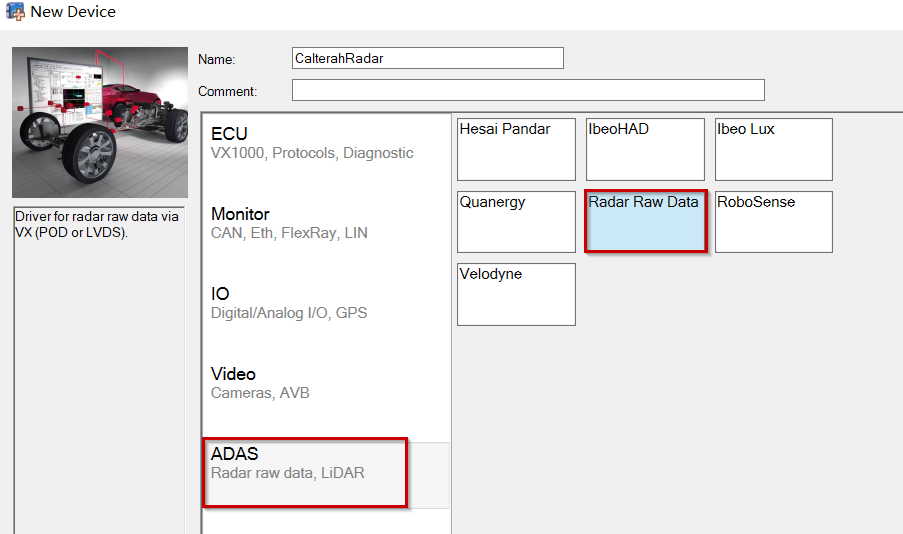
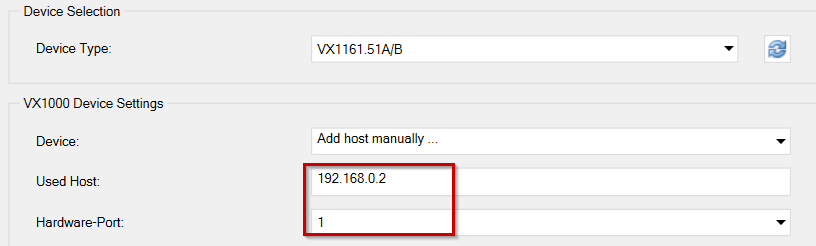
图7:CANape中Device配置
3.3 CANape在线采集
CANape中创建设备之后,会自动添加对应的A2L文件,采集RIF1分组下所有信号即可,其中,RawData信号为雷达原始信号;其它信号用于判断采集数据的正确性和连续性,Counter代表采集到的Chirps组数,CounterDiff用于判断Counter是否连续,Status = 0代表采集过程正确。
一个RawData数据块为一组或一个周期的Chirps的集合。假设一个周期Chirps数据包长度为16Bit/Sample*512个采样点*4路*512个chirp = 2MB,发送周期为50ms,采集的数据带宽为2MB/50ms = 40MB/S。
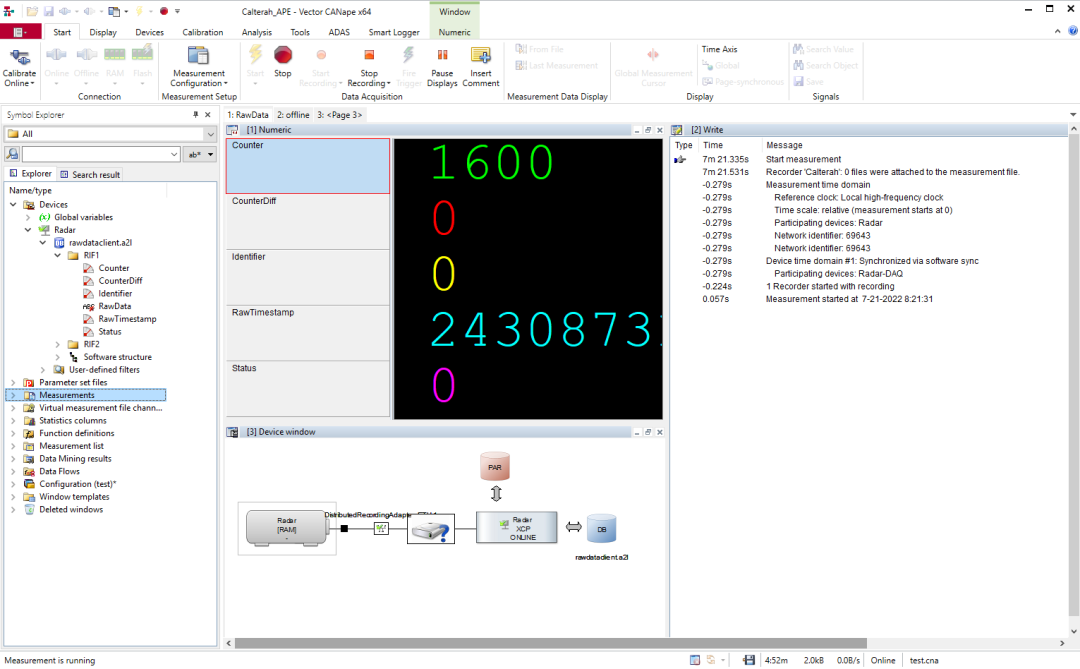
图8:采集方案CANape在线采集
3.4雷达原始数据离线分析
RawData数据块在CANape中可双击打开查看;原始数据用于算法迭代时,可通过MDF Lib库,在其它软件环境中加载并解析MDF文件。
关于MDF Lib的详细介绍可参考链接:
https://www.vector.com/int/en/products/products-a-z/software/mdf4-lib
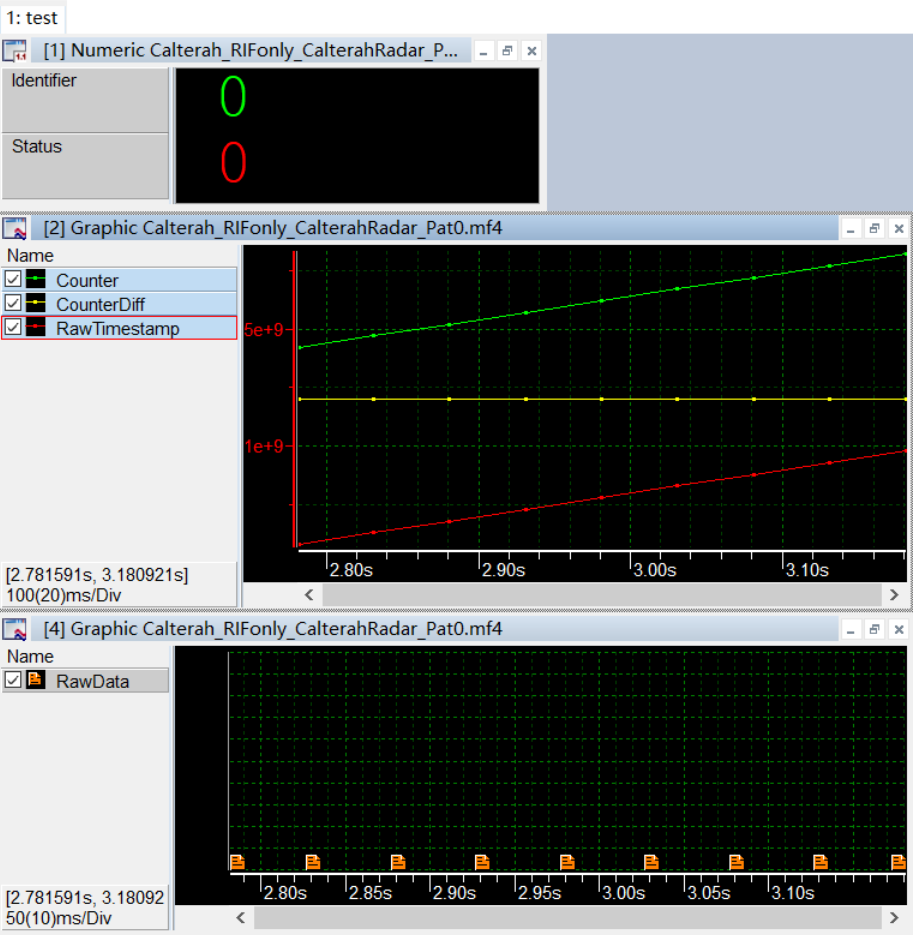
图9:原始数据离线查看
-
adas
+关注
关注
310文章
2205浏览量
209087 -
自动驾驶
+关注
关注
788文章
13995浏览量
167675 -
驾驶辅助
+关注
关注
0文章
31浏览量
10018 -
加特兰
+关注
关注
0文章
44浏览量
139
发布评论请先 登录
相关推荐
金属加工车间三菱机床数据采集如何实现
加特兰集成Cadence DSP,升级汽车成像雷达解决方案
Cadence与加特兰携手提升汽车雷达系统性能
加特兰与Cadence合作开发下一代汽车成像雷达解决方案
用FPGA采集的原始数据导入waveVision和matlab中分析,发现2、3次谐波幅度很大,是什么原因导致的?
IWR1443和DCA1000EVM采集了原始数据后,如何在MATLAB中对数据进行后续处理?
数据采集器的工作原理解析 实时数据采集器的优势是什么
数据网关与数据采集器的区别

加特兰完成数亿元D轮融资,专注CMOS毫米波雷达芯片设计

2024加特兰日 |加特兰毫米波雷达新方案惊艳亮相,以创新技术加速毫米波雷达普及






 工商网监
工商网监
评论