 整车照灯照明性能试验动态测试方法
整车照灯照明性能试验动态测试方法
摘 要:
为了满足汽车前照灯照明性能测试和评估的需要,提出了整车级动态测试方法。首先,构建了集定位,数采和分析功能为一体的试验系统,并根据国家有关法规标准和中国道路的实际状况,制定出详细的试验要求,试验场景、测试步骤及测试指标并采用实车试验对该方法进行检验。研究表明:不同型号前照灯照明性能在既有规定约束下呈现较为明显差异,其实际效果很难达到驾驶员照明安全要求。文中所提方法对以法规,车辆为主的新评价规程具有一定借鉴意义。
目前汽车行业日益重视对乘员及行人安全的防护,尤其是夜晚或者光线较差时路况获知难度加大,这对于驾驶员来说是一种考验,但也会给行人的安全造成一定危险。前照灯视为汽车的“眼睛”,性能优越的前照灯能改善夜间行车安全和让驾驶者夜间驾驶更轻松自如,从而对汽车前照灯照明性能有严格要求。
目前,已颁布的国家标准仅从配光角度对前照灯照明要求进行了约束,例如:GB 4599-2007[1]、GB 25991-2010[2]、GB 21259-2007[3]分别对汽车用灯丝灯泡前照灯、LED前照灯以及气体放电光源前照灯的配光性能等做出了规定,但这仅是在车灯零部件级别的技术要求。此外,车灯的安装高度、角度等要求也是一个可变范围,如GB 4785-2019[4]。满足标准要求的车灯在整车上安装时,会因安装位置和调光精度不同而导致照明效果出现偏差。特别是实际应用时,汽车在行驶状态下,受路面,天气,汽车姿态等因素影响较大,前照灯真实照明效果很难反映出来。所以,为改善道路交通安全和推动企业技术进步,需要在现行法规标准要求的基础上,对前照灯整体性能做出更客观,更真实的检测与评估。
整车前照灯性能测试进展
国外对于以整车为单位的汽车前照灯照明性能检测与评估方法的研究起步比较早。从2003年起,欧洲新车评价程序(Euro NCAP)准备引进灯光评价机制,联合国机动车照明和光信号专家组(GTB)成立了特别工作组开展此项研究,最终由国际照明委员会(CIE)D4部门(交通照明和信号)的技术委会TC4-45与GTB合作完成,并于2010年形成技术报告CIE 188《汽车前照灯系统性能评估方法》[5]。这种测评方法,被测车静止,前照灯位置及角度固定不变,不考虑汽车行驶过程中车身姿态和道路起伏带来的影响,其真实值和测量值之间可能会产生偏差。
美国公路安全保险协会(IIHS)于2015年8月发布了汽车前照灯的测评规程[6]。不同的是,IIHS采用了动态测试方法,为了消除车辆悬架差异的影响,同时保证在不同环境、不同位置及其他设施上试验结果的可重复性,该方法在后处理过程中对车辆俯仰角变化造成的数据偏差进行了处理和校正。从2016年至今,IIHS已完成数十款车型的评价,由试验结果可知,优秀率呈逐年上升趋势,表明这种评价机制在汽车前照灯性能改善方面起到了一定的积极影响。
另外,美国高速公路安全管理局(NTHSA)在2015年12月发布新的CNAP新车评价规程NHTSA-2015-1119时,也加入了3项与安全有关的前照灯测评内容,然而,该方法依旧采用了静态测评方法,不能完全体现实际的照明效果。不过,该方法首次提到了关于自适应远光灯(ADB)的测试,为ADB技术的发展和完善提供了很好的测试研究数据基础,同时,也鼓励了其他先进照明技术的崛起。
国内机构对前照灯在整车上的照明性能测试方法研究相对较少,中国汽车技术研究中心有限公司于2020年8月发布了C-NCAP中国新车评价规程(2021版),其中,在照明安全部分,提出了对汽车前照灯展开测评。该方法主要基于CIE TC4-45的研究内容,采用整车级静态室内测试方法。除了各大检测机构,各主机厂内部也有相应的前照灯性能合格检测程序。例如,奇瑞汽车姜舒[7]提到了丰田TSC 3127G大灯配光性能标准方法;北京福田戴姆勒杨文昌等[8]结合照度数据对前照灯装车时实际路面照射效果进行了主观评价方法研究。但是我国还缺乏适合中国实际情况的动态评价体系,在此基础上对汽车前照灯照明性能动态测试方法做了初步的研究,为今后的研究提供依据和方向。
前照灯整车性能测试方法
测试系统
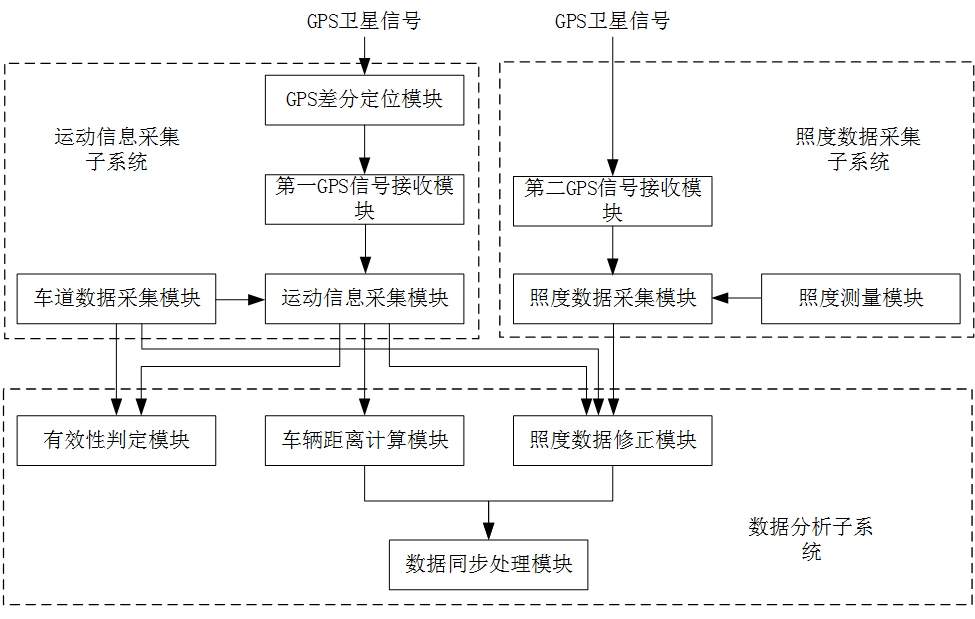
本文采用实车动态测试方法对前照灯近光和远光的能见度进行评估。测试系统如图1所示,主要包括3个部分:运动信息采集子系统、照度数据采集子系统以及数据分析子系统。其中,运动信息采集子系统用于采集测试车道在预设坐标系中的位置信息以及相对于坐标原点的高度差数据,并在试验过程中采集被测车辆的行驶轨迹、速度以及俯仰角信息,与GPS时间同步存储。照度数据采集子系统用于采集固定测量点处车辆前照灯的照度数据,同样与GPS时间同步存储。数据分析子系统用于判定当次测试是否有效,根据行驶轨迹计算车辆与测量点的距离,并利用GPS时间同步处理得到前照灯照度与距离之间的关系曲线。利用这条曲线得到被测汽车前照灯照射一定照度值时所能到达的范围,并以此范围作为前照灯照度能见度评价指标。
测试要求
测试场地要求
测试道路包含直道和弯道两种,弯道的半径为150m和250m,分别测试左弯道和右弯道。为了保证车辆在试验过程中有足够长的加速和减速区间,测试直道长度不少于220m,弯道长度(沿弧线)不少于120m。根据JTG B01-2014《公路工程技术标准》的要求[9],设计速度在40km/h、60km/h的车道宽度为3.5m,因此,测试所用的车道线内侧的宽度为3.5m;按照GB5768.3-2009《道路交通标志和标线 第3部分:道路交通标线》[10]的要求,车道线的常用宽度为0.15m。测试车道图示如图2,“x”是测试坐标原点。因外部光照对测试结果准确性有一定影响,所以在测试中环境照度值应该在0.3lux以下。
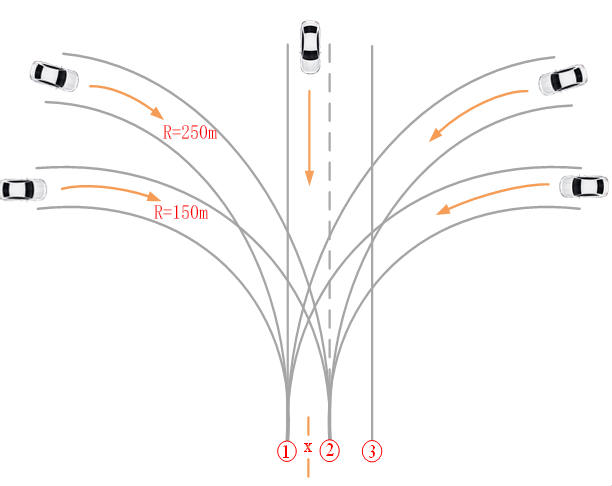
图2 测试车道示意图
传感器位置要求
前照灯最重要的作用就是照亮司机前面的路,所以它的照明区域应该要覆盖汽车前面一段距离。由于城市及郊区道路上十字路,T型路及其他汇流路口众多,行人,摩托车及其他目标物难以避免,因此前照灯照明区域须有一定的覆盖面积。根据Sullivan and Flannagan (2007)[11]的研究发现,夜间行人从左侧穿越时发生的碰撞高于右侧,因此本文中的测试方法主要关注被测车辆所行驶车道边缘上的能见度以及相邻左侧车道左边缘上的能见度。图2中①、②、③为照度传感器的摆放位置,直道测试时,测量点①、③的照度值,弯道测试时,测量点①、②的照度值。
传感器测得的高度照度值要表示能充分而准确地辨识出前方目标物,太低则可能漏辨识,太高则可能达不到国标配光要求并可能会影响对向行驶车辆。CIE 188报告中指出,0.25m是符合人体平均身高的腿的中点高度,是辨别行人的最低高度,并且SAE J2829[12]中也表明,照射高度达到0.25m时足以看清障碍物,因此传感器放置在距离地面0.25m的位置上。
被测车辆要求
被测汽车要组装满足国家强制规定的前照灯进行检测,检测之前需测出汽车的前后轴荷,计算出汽车总质量,以此重量作为整车整备质量。试验设备安装在车辆副驾驶一侧的位置上,在安装试验设备后应进行配载,配载后须满足公式(1)的要求:M+G+T+P=(M+200)×(100%±1%) (1)其中,M为整备质量,G为驾驶员质量,T为测试设备质量,P为配载质量,单位都为千克。同时为尽量降低设备安装对汽车车身高度降低的影响,要对配载分布进行调整,使汽车四个车轮轮眉在含有驾驶员时降低高度差控制在0.003m以内;若调整配载后无法满足该要求,则保证车辆前后轴负载率与满油空载时负载率之间的差值小于1%。
由于汽车出厂时可能受人为因素调节,汽车前照灯照准也会发生变化,检测之前需确认其满足国标要求。
有效性要求
为使测试数据尽可能真实地反映被测车辆前照灯的实际照明水平,提高测试数据精度并保证测试的可重复性,在测试过程中车辆、设备须满足以下几个要求:
(1)测试开始后,被测车辆的速度保持稳定,整个测试过程中速度的偏差在±2km/h范围内;
(2)调节方向盘使被测车辆的纵向中心线时刻保持在测试车道中间,车辆前缘中心点与车道中心线之间的横向距离保持在±0.1m范围内;
若单次测试不满足以上要求的任意一条,则本次测试无效,需重新进行。
测试场景及步骤
测试场景
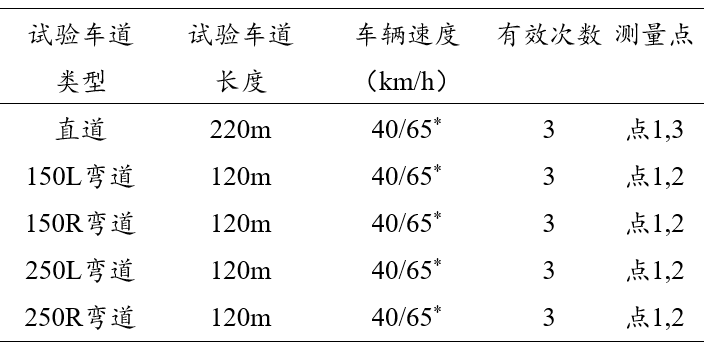
试验情景有近光灯情景和远光灯情景两种,各灯光类型试验条件均为表1所列条件,共需有效试验三次,车速为65km/h只对带自适应前照灯汽车有效。表1 测试工况
测试步骤
测试按照以下步骤进行:
(1)测试前被测车在平坦车道内,车前缘中心点距测点纵向距离超过220m或者弯道长度超过120m时打开车近光灯或者远光灯;
(2)被测车辆加速到40km/h或65km/h并维持,当纵向距离等于220m或弯道长度达到120m时,试验正式开始;
(3)被测车辆逐渐靠近并越过测量点;
(4)当被测车辆后缘越过测量点2s后,试验结束。
测试实施及结果分析
测试实施
按照测试要求和测试程序,本文完成了6款车型的测试试验,其中3、5、和6号为轿车,1、2和4号为SUV,并且1、4号为自主品牌车型,其余为合资品牌车型。图4为某车型的试验现场照片,在试验完成后通过后处理程序进行数据处理得到照度—距离(车辆前照灯与照度传感器之间)曲线。在实际驾驶过程中,目标物必要照度值的检测可依赖于多种因素,如目标物尺寸,相对背景对比度,驾驶员视野,驾驶员对比敏感度及视力等等。最常见的用来评估低对比目标物照度距离的单一照度值是3lux[5,13]。而对于动态测试,由于车距变化和设备不准确会产生更大比例的影响,选择的阈值越低,测量的难度就越大。因此本研究选择5lux作为能见度的度量,比3lux值测量得更加准确,同时也能确保对于更低对比度的障碍物检测也有足够的光线水平。
近光灯测试结果
图5~图7分别给出了6款车型近光灯在直道、弯道上的能见度距离曲线。当汽车逐步接近传感器时,测量点照度值会出现先上升后下降的变化,5lux距离的选择应在照度达到5lux并可连续维持之上直到进入要求的范围时车辆与传感器之间的最大距离。
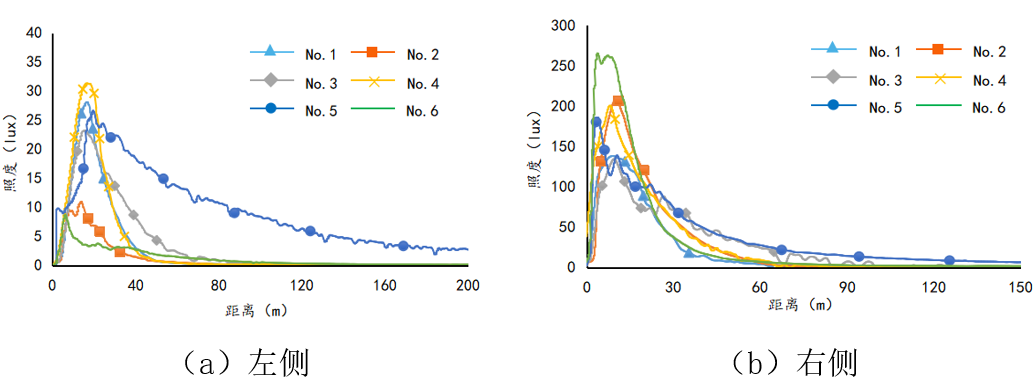
图5 直道能见度距离曲线
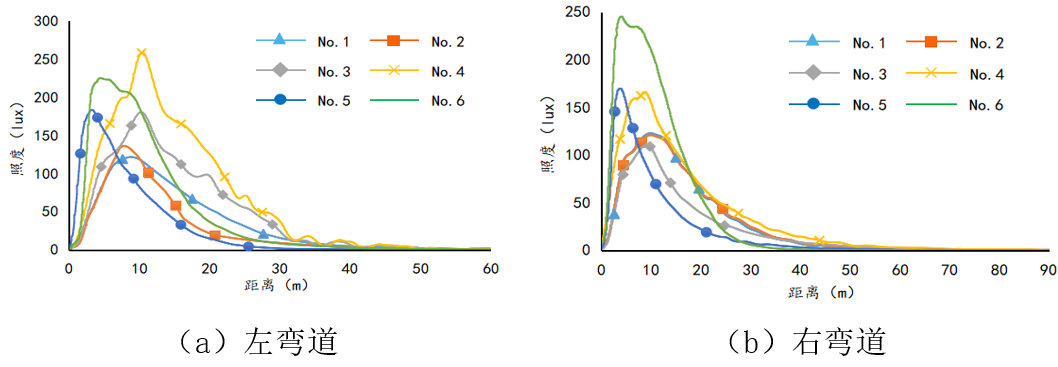
图6 半径150m弯道能见度距离曲线
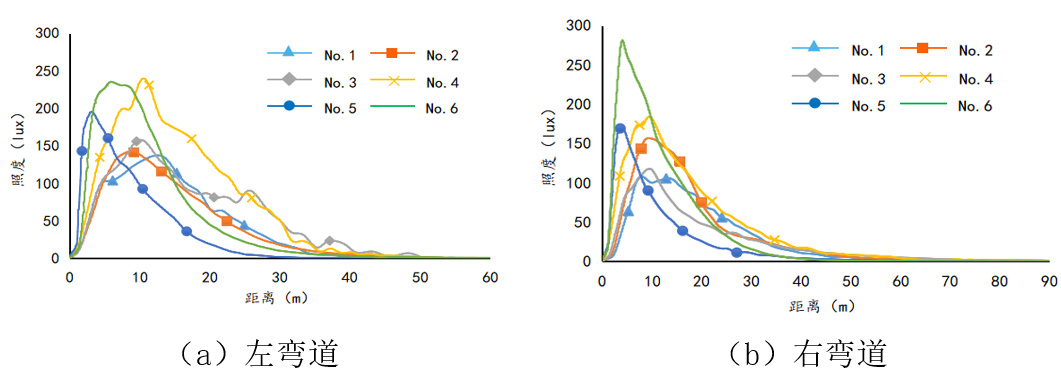
图7 半径250m弯道能见度距离曲线
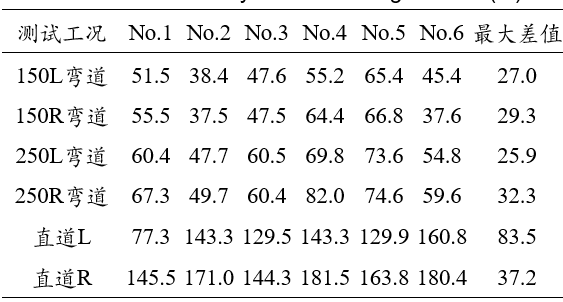
表2 近光灯5lux能见度距离(m)
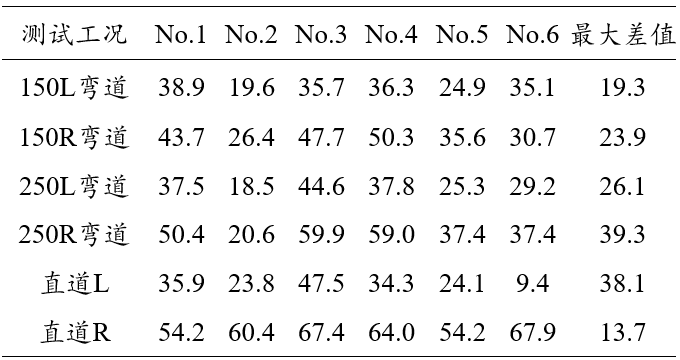
表2给出了各测试工况下6款车型近光灯的5lux能见度距离,结合图表数据分析可以发现:
(1)由于法规中明暗截止线要求和测量距离等因素制约,直道左照度值比右照度值低得多,增大此值可增大左行人可见度。同时也能看到照射距离较远时前照灯的照明宽度并不一定很大,比如在车型6的直道中右边5lux的距离就达60m,左边只有10m以下,表明照明范围横向和纵向能力需兼顾。
(2)根据曲线图,弯道左弯最大照度值的分布比右弯高,从表中平均值看,右弯道的5lux能见度距离则高于左弯道,由此可见并不是前照灯可达到的照度值越大能见度就越好。对比同一工况下不同车型的数据也可以得出此结论,如车型6在250m右弯道的最大照度值明显高于车型4,而其5lux距离却比车型4低了超过20m。
(3)虽然都装配了符合国家配光标准的前照灯,不同车型的5lux能见度距离差异仍比较明显。从表中可以看到,各工况下5lux能见度距离的最大差值都超过10m,而差值的最大值将近40m,表明不同汽车的近光灯实际照明效果存在很大差异。作为夜间行车中使用频率最高的照明灯对于行车安全也有很大影响。
(4)按照本文所用的前照灯照明性能测试方法,从整体结果来看,车型2近光灯的性能相对最差,车型3相对最优。
远光灯测试结果
图8~图10分别给出了6款车型远光灯在直道、弯道上的能见度距离曲线,表3为相应工况的5lux能见度距离数据。结合图表以及近光灯的测试数据可以发现:
(1)远光灯的5lux照射距离明显增加,弯道上可以增加20-30m,直道上则增达100m,可以有效提高夜间行驶的安全性,但由于中国道路多为双向行驶,远光灯的使用范围受限。
(2)对远光灯而言,对同一半径弯道而言,不管是向左弯或向右弯,5lux能见度的距离变化较小,但对不同机型而言,其距离最大差异仍然较大,均超过20m。
(3)直道上远光灯的照射距离较远,5lux的能见度都能达到150m左右,对驾驶员来说有足够的可视范围,但不同车型也有明显的差距。
(4)根据本论文提出的前照灯照明性能试验方法,由总体结果可知,型号2远光灯性能比较最差,型号5较好。
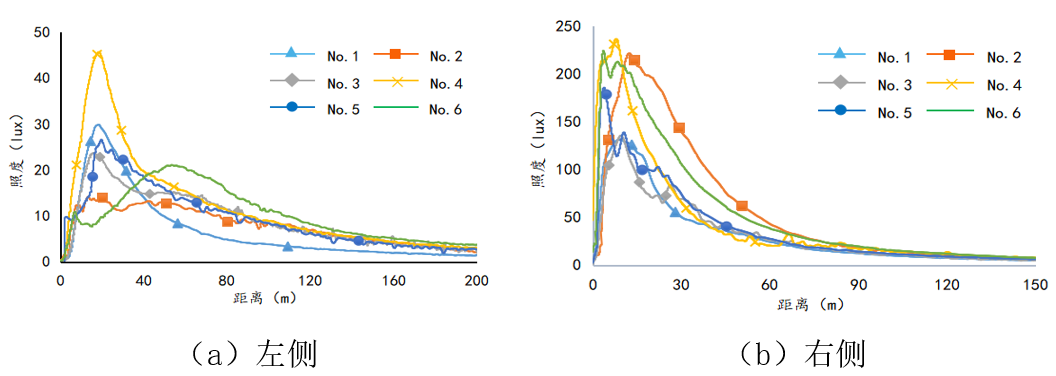
图8 直道能见度距离曲线
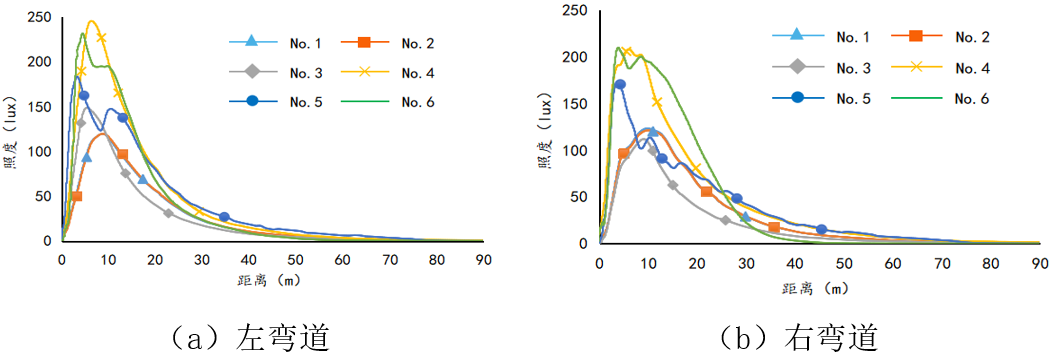
图9 半径150m弯道能见度距离
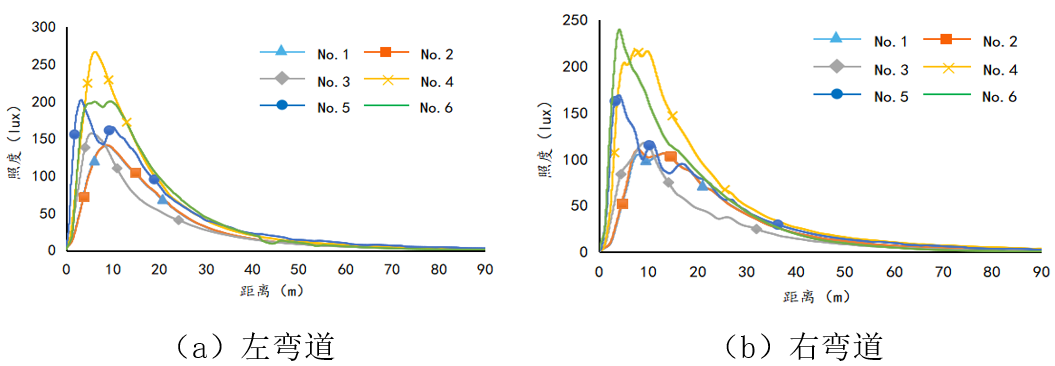
图10 半径250m弯道能见度距离表3 远光灯5lux能见度距离(m)
结 论
汽车前照灯照明性能对于夜间道路交通安全起着十分重要的影响,目前国家标准法规仅针对前照灯产品性能及安全方面提出最基本限值要求,无法满足广大司机的现实需要。文中给出了前照灯根据车辆及实际道路照明性能进行动态检测的方法,通过对检测结果的分析可以得出一个结论:
(1)同样是符合法规要求的前照灯,在实际道路上的照射范围差异明显;
(2)车灯的照度值越大,实际照明效果不一定越好,对夜间行车安全影响较大;
(3)纵向照明距离远的前照灯,横向照明宽度不一定大,对侧向障碍物的辨别效果不佳。
根据以上结果可见整车级测试比零部件级测试更贴近实际情况,文中所提方法对于前照灯真实性能的评估是可行的,通过对大量测试数据进行分析,综合考虑不同光型和不同情景下的权重分配情况,可制定合理评价指标并形成完整测评方法。
-
测试
+关注
关注
8文章
5368浏览量
126923 -
车灯
+关注
关注
1文章
206浏览量
16638
发布评论请先 登录
相关推荐
SMD灯珠的性能特点 常见SMD故障及解决方法
循环腐蚀试验(CCT):一种评估材料耐久性的动态测试方法

LED高精密灯板:卓越照明
帝奥微受邀参加2024第二届汽车照明产业技术论坛暨车灯产业价值链展
动态追溯方法:彻底革新软件测试

鸿利智汇携汽车照明产品亮相上海ALE展
光峰科技出席DVN底特律汽车照明研讨会
Melexis发布新一代MLX81123,革新汽车动态照明技术
步入式恒温恒湿试验房的校准步骤和方法

数能低压恒流IC全集(适用于LED灯带,车灯照明,UVC消毒灯,LED商业照明,高端轨道照明等应用)
汽车整车环境试验设备和环境试验设备有什么区别

整车高低温交变湿热试验室——车企必备的环境可靠性试验设备
汽车环境低气压实验中的整车试验设备






 工商网监
工商网监
评论