 【深度解析】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【深度解析】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
许多任务要求控制器实现贝塞尔等复杂曲线的轨迹插补,并通过倒圆角算法平滑轨迹中的拐角。本文将重点介绍一般曲线轨迹的插补算法,并基于ZMC300E EtherCAT主站控制器,实现对文字轮廓的绘制。
 ZMC300E介绍
ZMC300E介绍
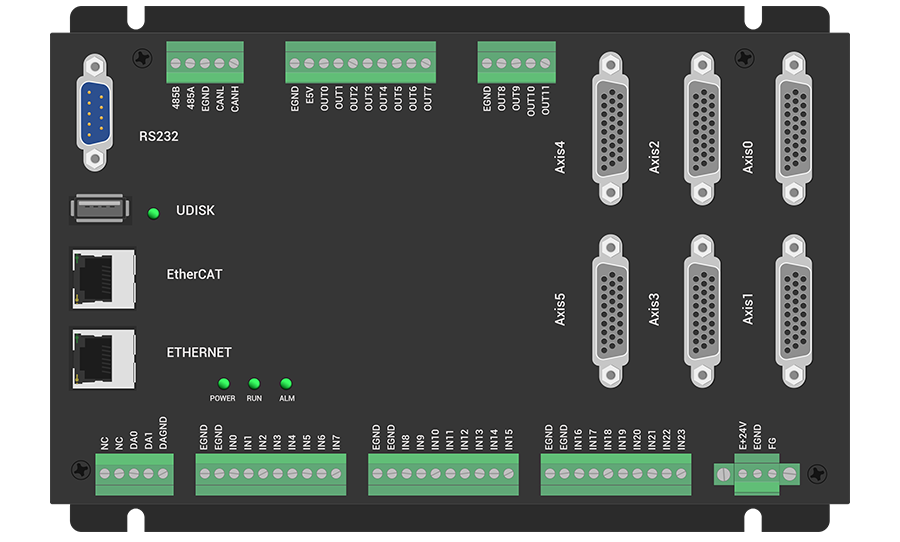
ZMC300E是广州致远电子股份有限公司开发的最新一代智能总线型 EtherCAT 主站控制器,是面向工厂智能化时代的机器控制器。其采用工业领域内先进的嵌入式 ARM 方案,集实时操作系统、智能算法于一身,以 EtherCAT 工业以太网协议为向导,可以快速、有效、便捷的构建数控智能化设备,以适应工厂智能化、信息化产业的变革。ZMC300E采用工业领域内先进的嵌入式 ARM 方案,使用TI的Cortex-A8内核的AM335X应用处理器为核心,配合Xenomai高实时性Linux系统,精心设计了一路EtherCAT口作为主站使用,其通讯可实现ms周期任务抖动±15us以内,可满足运动控制器的高实时性要求。为了满足不同的自动化应用需求,ZMC300E还提供了多种丰富的硬件接口,包含1路CAN、1路485、2路以太网、32个用户I/O等等。

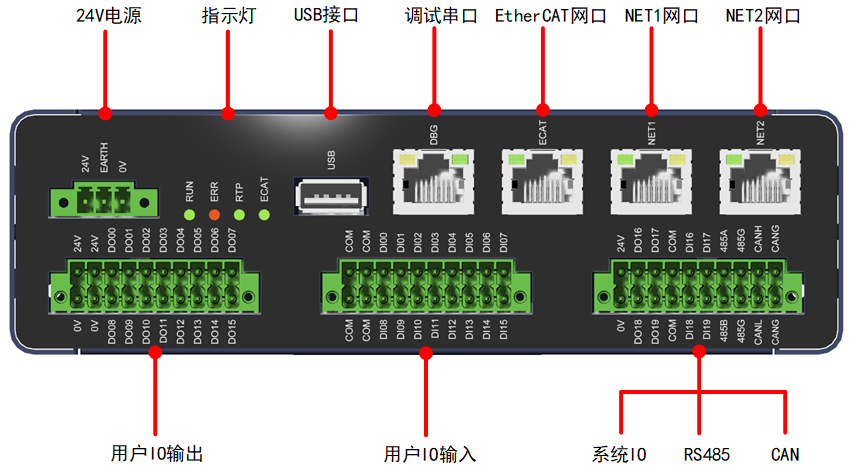
图1 ZMC300E接口示意图
ZMC300E EtherCAT主站控制器是为设备制造商提供多轴数、多IO点数控制的新一代可靠智能的运动控制解决方案,可以广泛应用于注塑行业、冲压行业、车床行业、搬运码垛、关节机器人、喷涂、玻璃机、压铸机、包装设备、3C设备、锂电池设备、纺织、流水线工作站、非标自动化装备、特种机床等高端设备应用。 插补算法插补算法根据给定的信息进行数字计算,不断计算出参与运动的各坐标轴的进给指令,然后分别驱动各自相应的执行部件产生协调运动,以使被控机械部件按理想的路线与速度移动。插补最常见的两种方式是直线插补和圆弧插补。插补运动至少需要两个轴参与,进行插补运动时,首先需要建立坐标系,将规划轴映射到相应的坐标系中,运动控制器根据坐标映射关系,控制各轴运动,实现要求的运动轨迹。
目前,ZMC300E支持下面列出的轨迹插补算法:包括直线、平面圆弧、空间圆弧、螺旋线、渐开线、椭圆弧和贝塞尔曲线等。
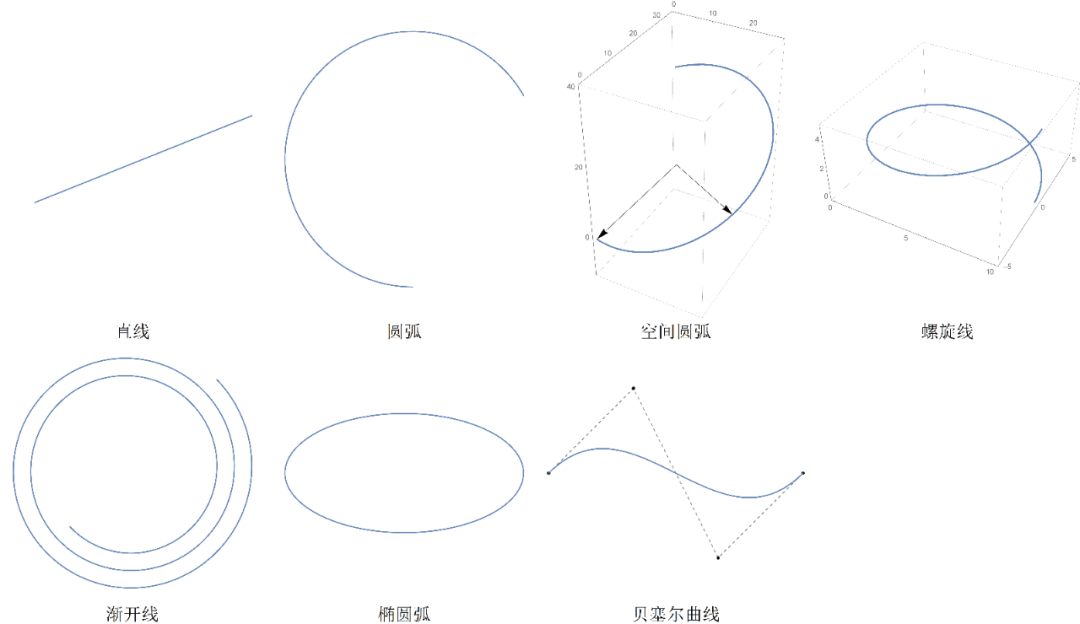 图2 轨迹插补算法示意图线运动的插补运动:由起始点处沿 X 方向走一小段(给一个脉冲当量轴走一段固定距离),发现终点在实际轮廓的下方,则下一条线段沿 Y 方向走一小段,此时如果线段终点还在实际轮廓下方,则继续沿 Y 方向走一小段,直到在实际轮廓上方以后,再向 X 方向走一小段,依次循环类推,直到到达轮廓终点为止。
图2 轨迹插补算法示意图线运动的插补运动:由起始点处沿 X 方向走一小段(给一个脉冲当量轴走一段固定距离),发现终点在实际轮廓的下方,则下一条线段沿 Y 方向走一小段,此时如果线段终点还在实际轮廓下方,则继续沿 Y 方向走一小段,直到在实际轮廓上方以后,再向 X 方向走一小段,依次循环类推,直到到达轮廓终点为止。
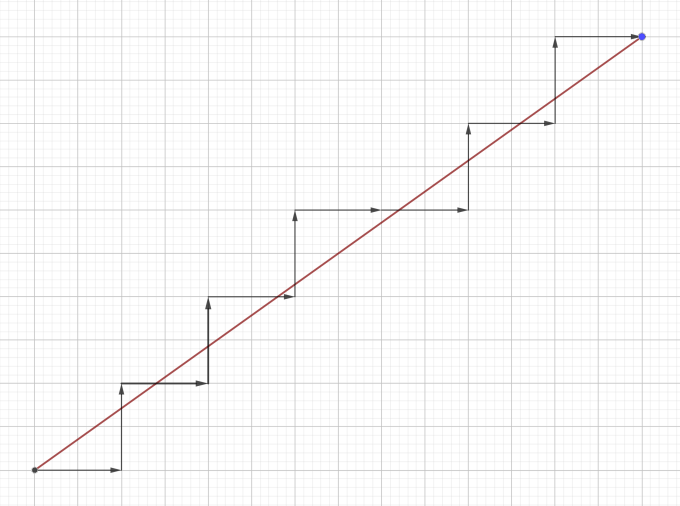
图3 直线插补示意图
弧插补与此类似,也是通过沿两个方向运动最终到达轮廓终点,其示意图如下。
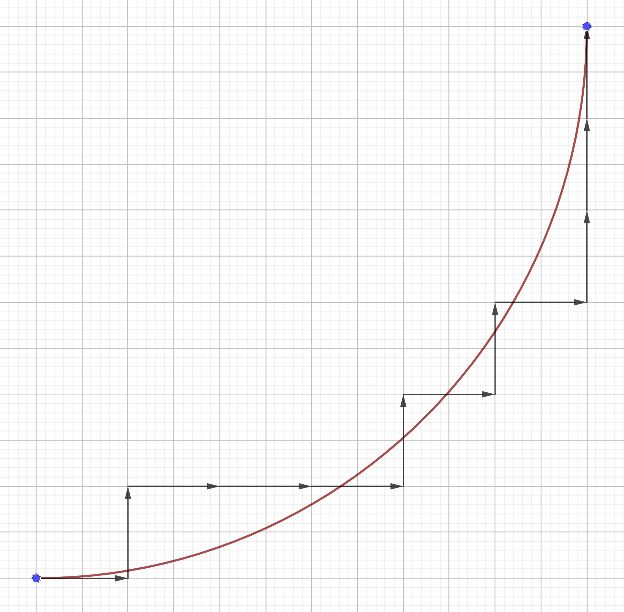
图4圆弧插补示意图
而对于椭圆弧来说,我们需要根据每一个时间段移动的距离得出完成该位移时新的坐标,也就是用直线代替了这段位移,随后使用直线插补的方法,最终实现对一般曲线的插补,可见下面的椭圆弧示意图。其中红点对椭圆弧的总位移进行了等分,相邻两个红点间椭圆弧的位移相等。而分段越多,相应直线段对椭圆弧的逼近就越好,此时在等分后的轨迹上完成插补即可。
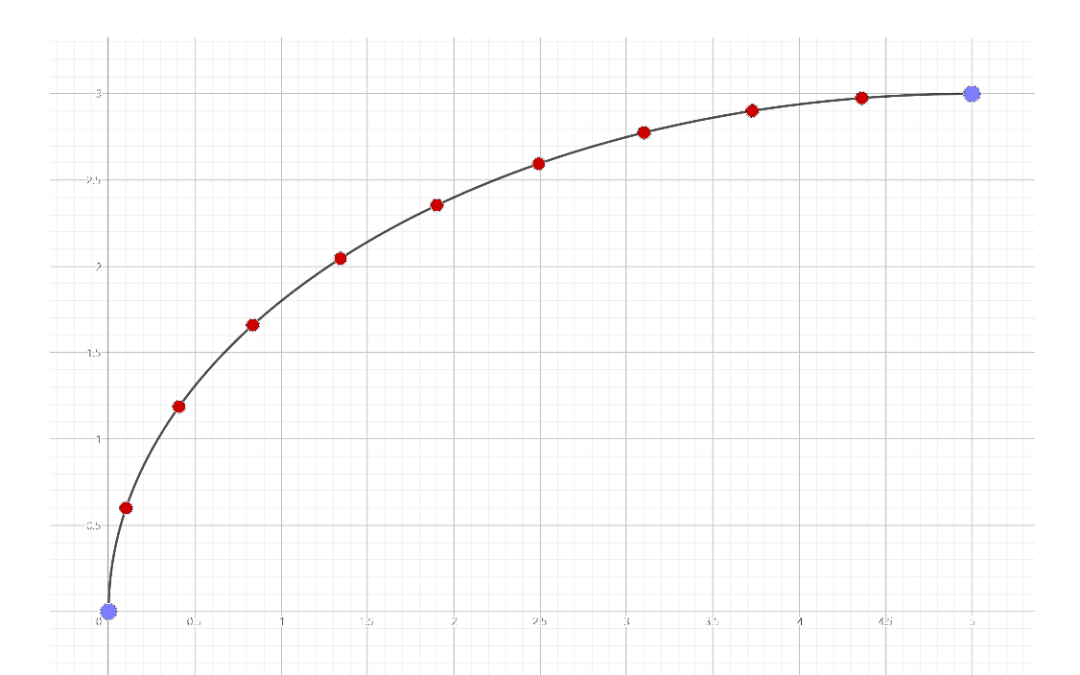
图5椭圆弧分段示意图
另外,对于贝塞尔曲线等一般曲线来说,需要依据一段时间内的位移得出其对应的坐标,随后采用插补进而实现整个曲线轨迹的跟踪。
 轨迹前瞻运动控制器的轨迹前瞻功能可以根据用户的运动路径自动计算出平滑的速度规划,以防止轨迹的拐角处速度过快。轨迹前瞻包括三种模式:拐角减速、倒角、小圆限速,而这三种模式也可混合使用。拐角减速会根据夹角大小确定拐角处的最大速度,倒角则会设置前后两个轨迹在拐角处的倒角,而小圆限速则会对半径小于设置值的圆弧轨迹进行限速。
轨迹前瞻运动控制器的轨迹前瞻功能可以根据用户的运动路径自动计算出平滑的速度规划,以防止轨迹的拐角处速度过快。轨迹前瞻包括三种模式:拐角减速、倒角、小圆限速,而这三种模式也可混合使用。拐角减速会根据夹角大小确定拐角处的最大速度,倒角则会设置前后两个轨迹在拐角处的倒角,而小圆限速则会对半径小于设置值的圆弧轨迹进行限速。
这里给出一个矩形以倒角圆作为前瞻的示例。一个普通的矩形轨迹如下图。
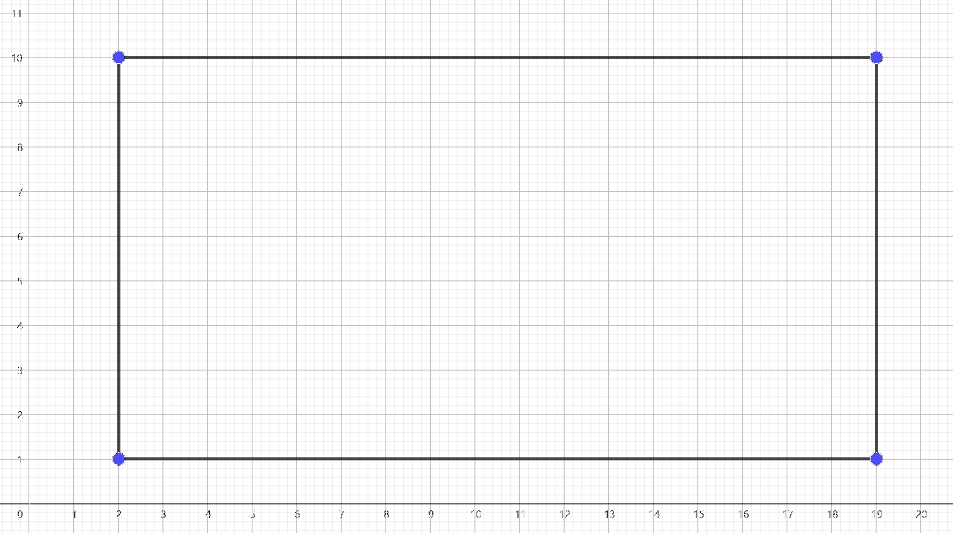
图6矩形轨迹示意图
该矩形含有四段轨迹。
若开启倒角圆作为前瞻,则矩形轨迹则会变为圆角矩形,共含有其八段轨迹,包含四段直线和四段圆弧。
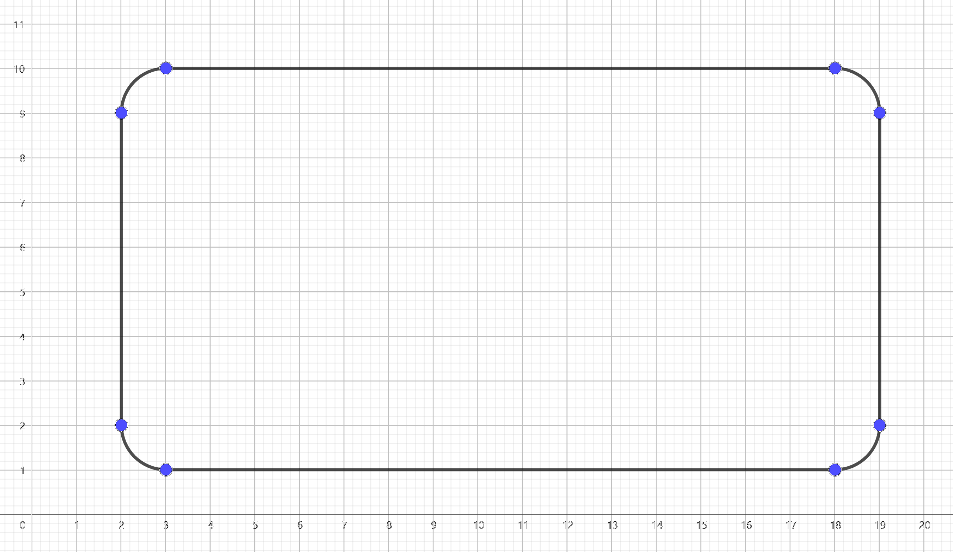
图7开启运动前瞻圆角矩形示意图
开启运动前瞻中的倒圆角。可以看到,在拐角处原来的直角弯改变为圆弧,整个运动轨迹上不再出现直接的拐角,这样能够消除轨迹改变时对机械的冲击。
绘图这里我们使用上面介绍的轨迹算法,绘制出复杂图形。首先我们由一段确定了字体的文字,并根据其笔画生成相应的轮廓:包括直线和贝塞尔曲线,这里选择的文字是“专业专注,只做第一”。
对于输入的文字,我们可以根据其对应的字体将它的笔画分解为曲线或直线,其中曲线可以用贝塞尔曲线表示,这样就可以得到对应绘图轨迹。
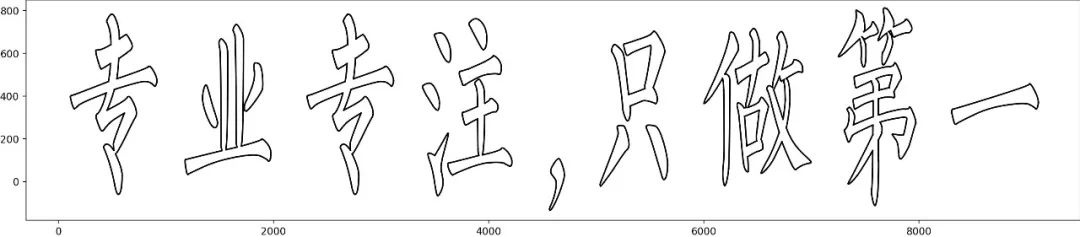
图8由文字生成轨迹图像
下图是汉字“专”的底部轮廓,可以看到由贝塞尔曲线表示的轮廓具有良好的光滑性。
图9局部笔画
可以看到图片包含众多不连续的笔画,那么,对于前后两个不连续的笔画来说需要提笔和进笔,对应z轴上下的运动。加入笔画的连接,可以得到以下的笔画绘图。 图10 笔画绘画示意图
图10 笔画绘画示意图
-
控制器
+关注
关注
112文章
16339浏览量
177847 -
机器
+关注
关注
0文章
781浏览量
40712
发布评论请先 登录
相关推荐
脉冲全闭环EtherCAT运动控制器的固件升级


什么是EtherCAT运动控制器?它有哪些特点?
基于全志T507-H的Igh EtherCAT主站案例分享

多轴高性能EtherCAT总线运动控制器ZMC408CE硬件介绍

EtherCAT运动控制器在LabVIEW中的运动控制与实时数据采集

电机控制领域如何实现CANopen设备接入EtherCAT主站控制器

EtherCAT主站控制器系统实时性测试

ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改






 工商网监
工商网监
评论