 畅行无阻 | AS-33C激光雷达,如何灵巧躲避每一个障碍物?
畅行无阻 | AS-33C激光雷达,如何灵巧躲避每一个障碍物?
【
安全
避障
】
一台AGV正穿梭在无人工厂内
当它的前方出现障碍物,会发生意外吗?
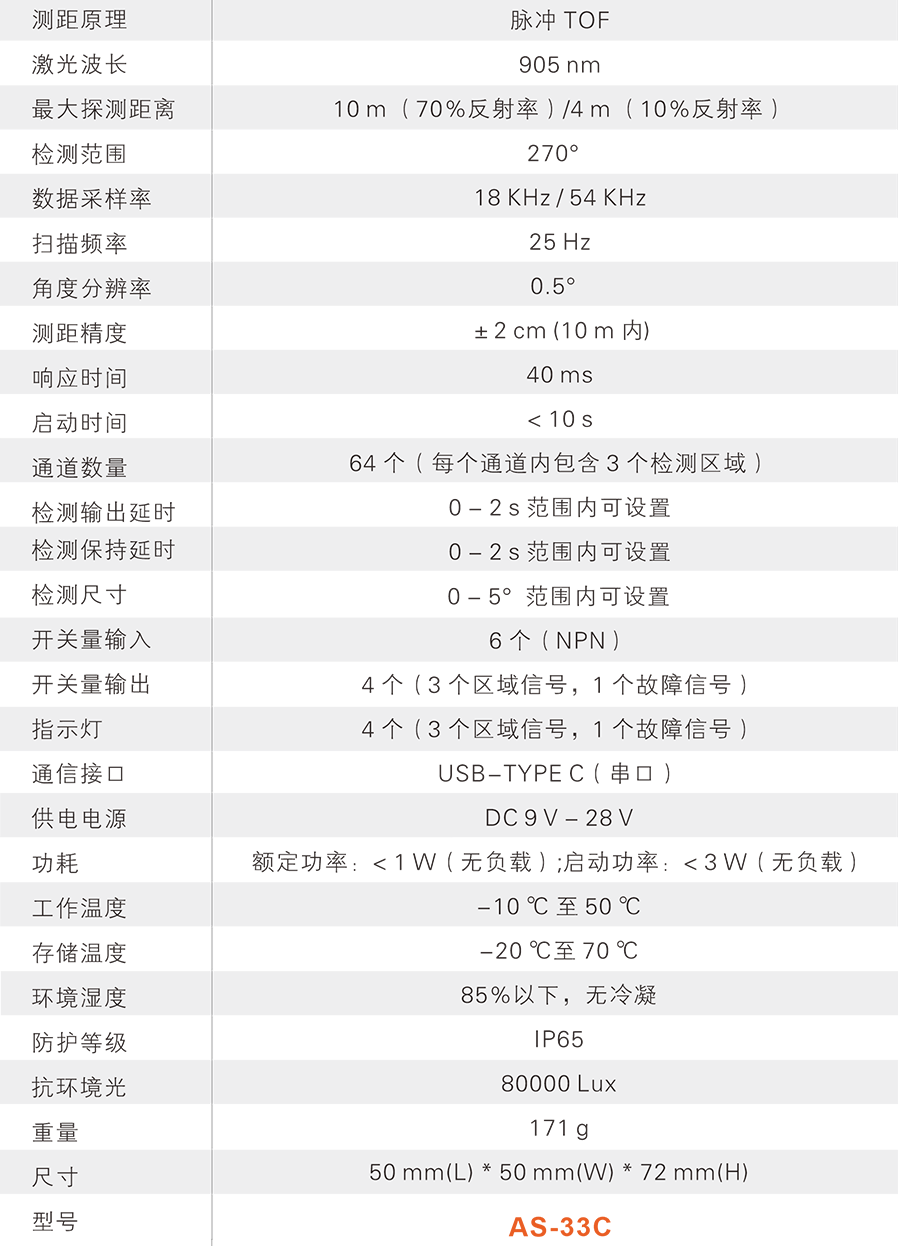
明治避障激光雷达的各类经典应用,采用的是TOF工作原理。精度高,反应速度快是TOF型激光雷达的主要优势,这种特性使得它成为工业场景AGV/AMR小车雷达选型的理想选择。
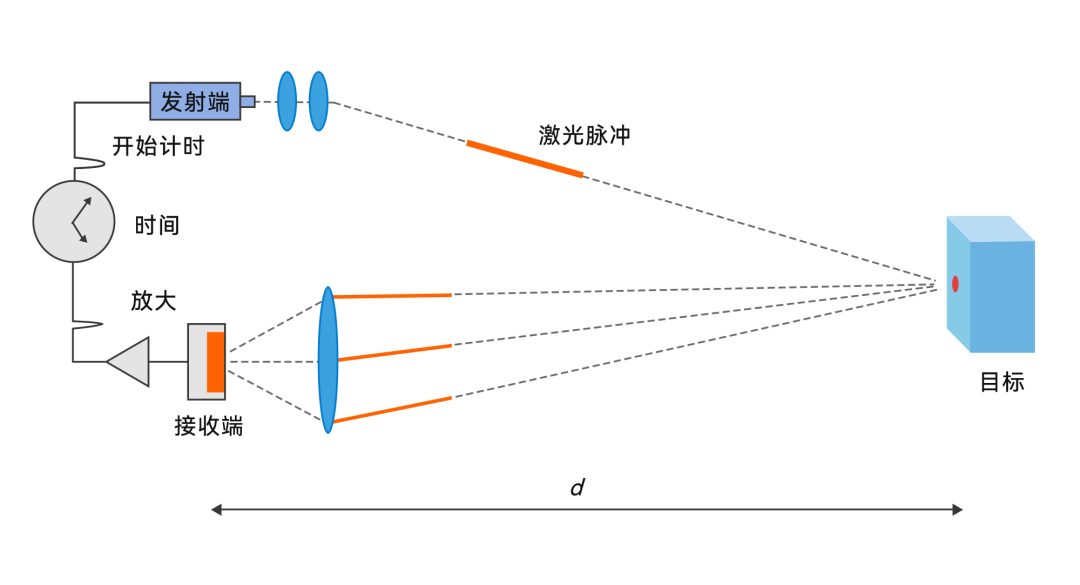
其工作原理是向目标发射一束光脉冲,然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,接收器准确地测量光脉冲从发射到被反射回的传播时间。通过距离与速度和时间的关系,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
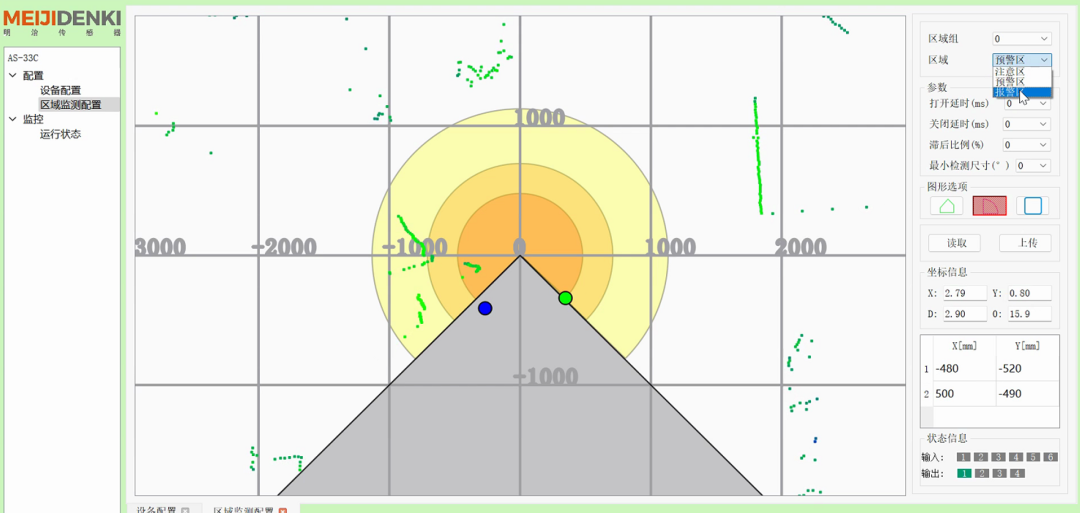
检测区域设置演示
根据实际应用需求在软件上划定注意区、预警区以及报警区域
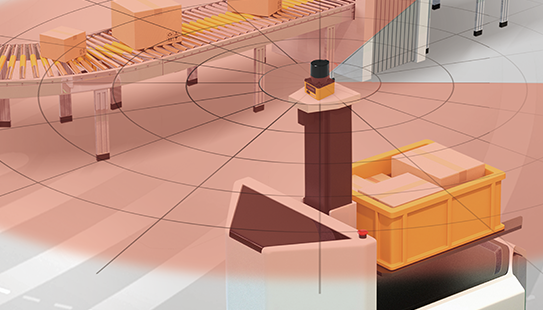
场景效果演示
AGV避障、叉车避障
明治的AS-33C激光雷达产品是保障AGV安全生产和提高生产效率的核心传感器,与这一应用需求高度契合。
得益于AS-33C较远的保护距离,以及较高的扫描频率,即使是在快速应用中,AS-33C也能有效保护AGV的行驶安全和周边设备、人员安全。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51051浏览量
753197 -
激光雷达
+关注
关注
968文章
3971浏览量
189865
发布评论请先 登录
相关推荐
AGV转运机器人需求快速增长,如何进行障碍物检测确保安全?
富唯智能移动机器人通过激光雷达导航算法,实现自动路径规划,无需轨道、磁条等。当路径中有障碍物时,会重新规划路径避开障碍物。

激光雷达的维护与故障排查技巧
激光雷达(LiDAR,Light Detection and Ranging)是一种利用激光进行距离测量和目标识别的技术。它广泛应用于无人驾驶汽车、地理信息系统(GIS)、环境监测、航空航天等领域
激光雷达技术的基于深度学习的进步
信息。这使得激光雷达在自动驾驶、无人机、机器人等领域具有广泛的应用前景。 二、深度学习技术的发展 深度学习是机器学习的一个分支,它通过模拟人脑的神经网络结构来处理和分析数据。近年来,深度学习技术在图像识别、语音
物联网系统中的自动驾驶的“眼睛”_纯固态激光雷达
物联网系统中为什么要使用纯固态激光雷达 物联网系统中使用纯固态激光雷达的原因主要基于其独特的优势和应用价值,这些优势使得纯固态激光雷达在

物联网系统中的高精度测距方案_单点TOF激光雷达
物联网系统中为什么要使用单点TOF激光雷达 物联网系统中使用单点TOF(Time of Flight,飞行时间)激光雷达的原因主要基于其独特的优势和应用场景的需求。以下是详细的解释:

操作技巧 | 明治激光雷达AS-33C的安装及使用注意事项
见红外激光偏转到不同的角度,从而实现对同一水平面270°范围内环境轮廓的扫描测量。与同类产品相比,AS-33C激光雷达具有如下特点:①测量距离远:由于采用脉冲测距原

光学雷达和激光雷达的区别是什么
光学雷达和激光雷达是两种不同的遥感技术,它们在原理、应用、优缺点等方面都存在一定的差异。以下是对光学雷达和激光雷达的比较: 定义和原理 光学
雷达探测障碍物是超声波还是次声波
雷达探测障碍物主要利用的是 超声波 ,而不是次声波。以下是对这一点的介绍: 超声波的特点 定义 :超声波是频率高于人耳听觉上限(约20000Hz)的声波。 特点 :超声波具有定向性好、穿透能力强
自动驾驶汽车如何识别障碍物
自动驾驶汽车识别障碍物是一个复杂而关键的过程,它依赖于多种传感器和技术的协同工作。这些传感器主要包括激光雷达(LiDAR)、雷达、摄像头以及
激光雷达VS毫米波雷达,一文读懂!
、反射和接收过程,通过比较发射信号与接收信号,获取目标的详细信息。 毫米波雷达原理 毫米波雷达(Millimeter Wave Radar) 利用毫米波频段的电磁波进行探测。其工作原理是发射电磁波信号,当信号遇到障碍物时发生反射

一文看懂激光雷达
文章大纲 城市 NOA 成竞争高地,政策助力高阶智能驾驶加速落地 成本下探+智驾升级,2030年激光雷达市场规模有望超万亿 ·城市 NOA面临工况复杂问题,激光雷达为“优选

激光雷达的应用场景
激光雷达在多个领域中都有着广泛的应用。以下是几个主要的应用场景: 自动驾驶汽车:激光雷达在自动驾驶汽车中起到了至关重要的作用。它可以帮助车辆检测和识别周围环境,包括障碍物检测、定位和导航、车道识别
做一个激光雷达,需要哪些基本部件?
激光雷达(LiDAR)是激光探测及测距系统的简称,目前广泛应用在无人驾驶和扫地机器人等领域。这种广泛的应用一方面得益于激光雷达的性能提升,一
发表于 01-19 14:22
•1093次阅读

【核桃派1B 开发板试用体验】激光声纳双雷达对比测试
就可以看到一下输出:
接着我们测试一下雷达特性:
可以看到在距离较短时,激光雷达所得测量值更精准,也更小。在此时参考激光雷达的读数会更
发表于 01-09 09:51





 工商网监
工商网监
评论