 米尔Zynq 7000系列单板的FPGA农业生产识别系统
米尔Zynq 7000系列单板的FPGA农业生产识别系统
随着农业生产模式和视觉技术的发展,农业采摘机器人的应用已逐渐成为了智慧农业的新趋势,通过机器视觉技术对农作物进行自动检测和识别已成为采摘机器人设计的关键技术之一,这决定了机器人的采摘效果和农场的经济效率。目前市面上最常见的是基于单片机开发的自动采摘机器人,但是随着人工智能的快速发展,通过建立神经网络基于大量图像数据训练的识别方法成为新一代智慧农业发展必不可缺的硬性条件。
智慧农业-图片来源于网络升级农业生产机器人,主控芯片该如何选择呢?FPGA实时高速采集功能,搭配ARM端高性能处理系统 ,必然是机器人构建自动识别采摘系统最优解决方案。Xilinx公司的Zynq 7000 系列的芯片作为控制器,既可以完成机器视觉算法,又可以实现对机器人的控制程序。此外,FPGA特有的并行处理能力可同时对多个目标进行识别采摘,提高了采摘效率;在此期间,可以通过优化算法和训练学习图像数据,对果实好坏进行分拣。
农产品识别系统的工作流程可分为以下几个步骤:(1)摄像头采集图像,将图像信息通过串口发送到FPGA,预处理图像数据。(2)调用ZYNQ芯片的识别算法程序包,识别农产品的种类,成熟度,大小等相关信息。(3)通过网络、多媒体接口把相应农产品信息显示在触摸屏和云端,实时监控画面并记录采摘信息。(4)在通过FPGA和软件的协调下,对图像中水果坐标信息进行计算,控制电机运转机械臂对成熟果实进行采摘操作。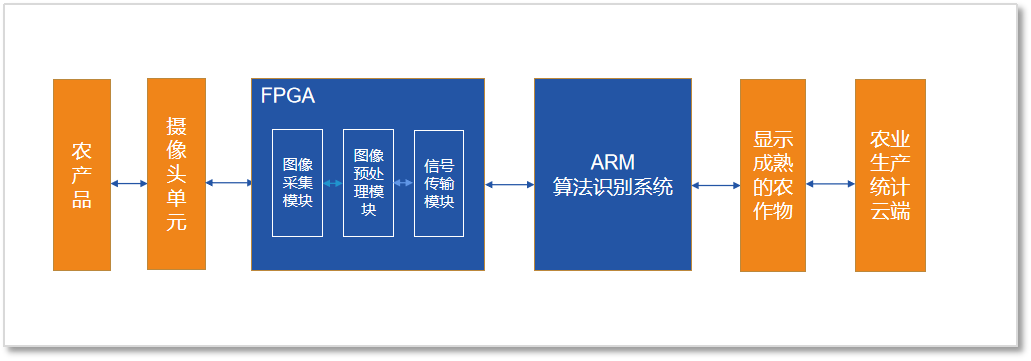 基于Zynq 7000系列FPGA农业生产识别系统流程框架图随着农业升级硬件需求的不断增加,米尔电子基于Xilinx Zynq 7000系列7Z010/7Z020处理器,设计了一款简单易开发的单板Z-turn Board,大容量存储设计,支持系统长期数据存储;拥有丰富的接口,摄像头接口,HDMI显示接口,LCD 接口,可连接高清触摸屏幕,显示各类数据信息,实现就地监控和农作物实时管理;拥有千兆网口和CAN,PMOD,丰富的I/O等数据通讯接口,可轻松应对各类场景下的多种功能需求。并且该单板支持PYNQ设计平台,设计人员可以通过Python语言和库,利用Zynq中融合可编程逻辑和微处理器的优势来快速构建更强大的嵌入式系统。
基于Zynq 7000系列FPGA农业生产识别系统流程框架图随着农业升级硬件需求的不断增加,米尔电子基于Xilinx Zynq 7000系列7Z010/7Z020处理器,设计了一款简单易开发的单板Z-turn Board,大容量存储设计,支持系统长期数据存储;拥有丰富的接口,摄像头接口,HDMI显示接口,LCD 接口,可连接高清触摸屏幕,显示各类数据信息,实现就地监控和农作物实时管理;拥有千兆网口和CAN,PMOD,丰富的I/O等数据通讯接口,可轻松应对各类场景下的多种功能需求。并且该单板支持PYNQ设计平台,设计人员可以通过Python语言和库,利用Zynq中融合可编程逻辑和微处理器的优势来快速构建更强大的嵌入式系统。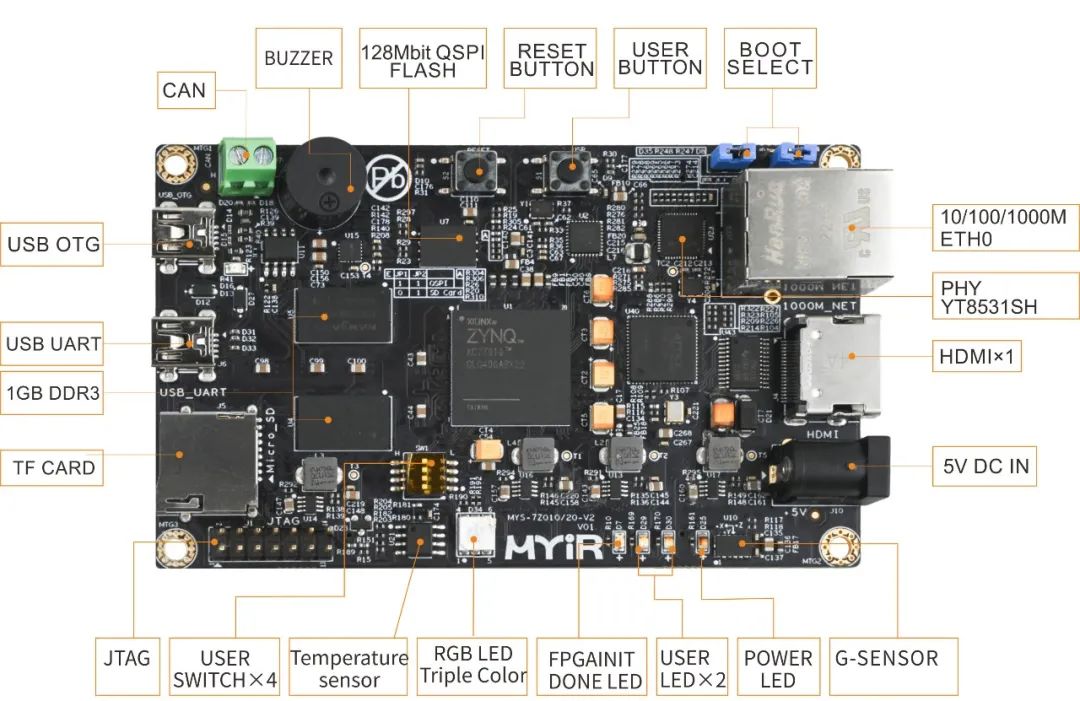
米尔基于Xilinx -7Z010/20-V2单板
附基于Xilinx -7Z010/20处理的MYS-7Z010/20-V2单板资料:
SOC:Xilinx Zynq-7010/20 高性能双核ARM Cortex-A9处理系统(PS),FPGA架构:可编程逻辑单元XC7Z010(28K,约43万逻辑门)XC7Z020(85K,约1.3M逻辑门)。
存储:QSPI 默认16MB,TF CARD槽(支持外部启动)
网络:一路千兆网口
USB:USB HOST*2
JTAG:1路PS/PL复用 JTAG接口(进行编程调试下载)
供电:5V/0.5A
为了开发的多样性,米尔还为Z-turn Board设计出专属Z-turn IO Cape,扩展了Z-turn 的普通IO,ADC,LCD,摄像头接口等,能搭配更多的外设模组共同使用。大大扩展了开发场景。

-
FPGA
+关注
关注
1629文章
21748浏览量
603887 -
单板
+关注
关注
0文章
31浏览量
10958
发布评论请先 登录
相关推荐
移远通信FMA310:智能农机自驾系统引领农业生产新变革
移远通信FMA310智能农机自驾系统,多元优势赋能农业生产

基于Xilinx ZYNQ7000 FPGA嵌入式开发实战指南
dac3174与xilinx zynq7000系列连接,fpga的案例参考代码有没有?
Xilinx ZYNQ 7000系列SoC的功能特性
正点原子ZYNQ7015开发板!ZYNQ 7000系列、双核ARM、PCIe2.0、SFPX2,性能强悍,资料丰富!
[XILINX] 正点原子ZYNQ7035/7045/7100开发板发布、ZYNQ 7000系列、双核ARM、PCIe2.0、SFPX2!
高效管理,LoRa技术赋能农业生产智能化!

基于FPGA的指纹识别系统设计
信息化与农业生产的深度融合

智慧农业气象站如何提升农业生产效益?
简谈Xilinx Zynq-7000嵌入式系统设计与实现
Zynq-7000为何不是FPGA?





 工商网监
工商网监
评论