 斗轮机无人值守控制系统之斗轮机安全防护系统
斗轮机无人值守控制系统之斗轮机安全防护系统
斗轮机是燃煤发电厂重要的大型设备之一,担负着电厂堆取煤的任务,但在作业时,受斗轮机结构、位置及运行方式的影响,加之驾驶室操作人员受视角、距离等因素的影响,易出现听不清话语,理解误差情况,导致操作人员与运维人员配合不当,启停皮带时间错乱、不合拍,这时就有可能会误伤正在皮带、机架或是轮斗上的工作人员,产生的危害性极大。
 XKCON祥控斗轮机无人值守控制系统
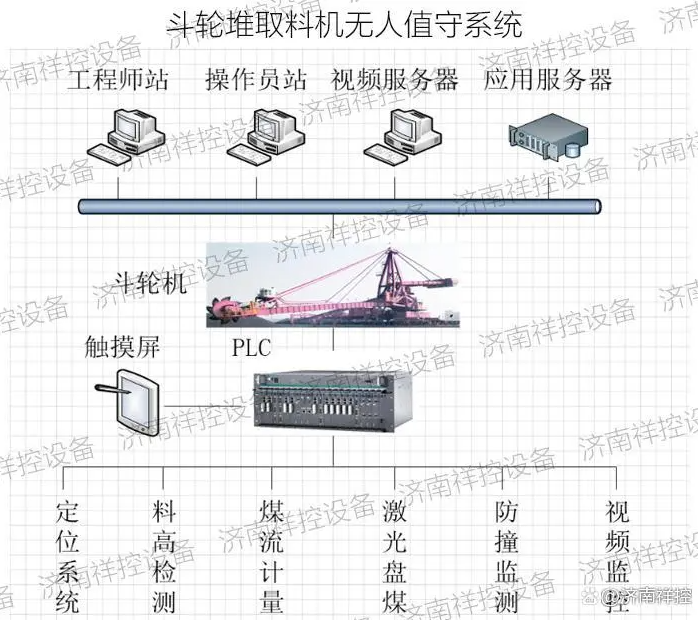
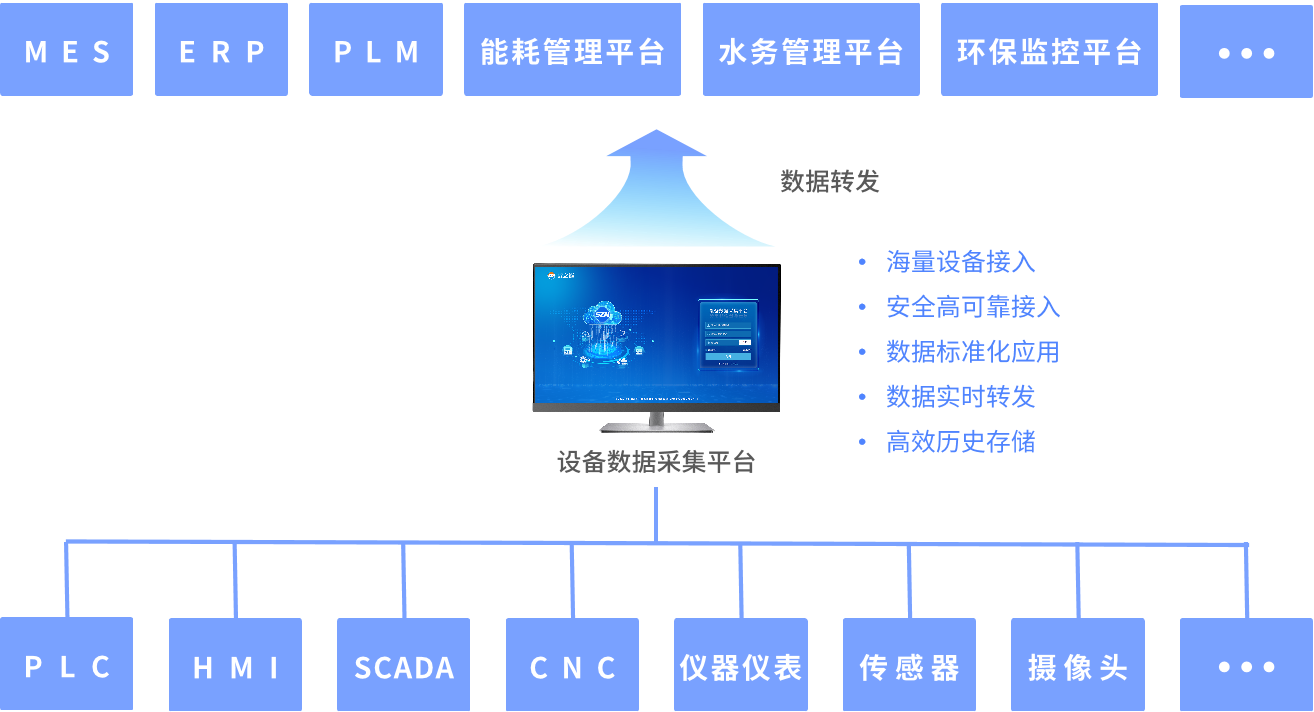
XKCON祥控斗轮机无人值守控制系统XKCON祥控斗轮机无人值守控制系统融合了空间精确定位、智能激光测量、红外测温、智能控制、数字建模和快速激光扫描等多种技术,通过安装精准定位装置、姿态传感器和斗轮机操控转换器等,将设备状态与煤场参数实时传送至上位控制系统,对斗轮位置和煤堆形状进行精准检测、数据运算、分析、判断,实现斗轮堆取料机对堆取煤、寻迹、流量、运行模式的全自动控制。
XKCON祥控斗轮机全自动无人值守系统在斗轮机安全运行方面,通过安装超声波距离传感器、安全避障激光扫描仪等检测设备构建了斗轮机安全防护系统,对斗轮机设置了四重安全防护控制:
1.软急停安全防护:在输煤程控室的上位机画面应设置急停按钮。
2.硬急停安全防护:从输煤楼斗轮机高压配电柜至输煤程控室铺设控制电缆,在输煤程控室的操作台上设置急停按钮。
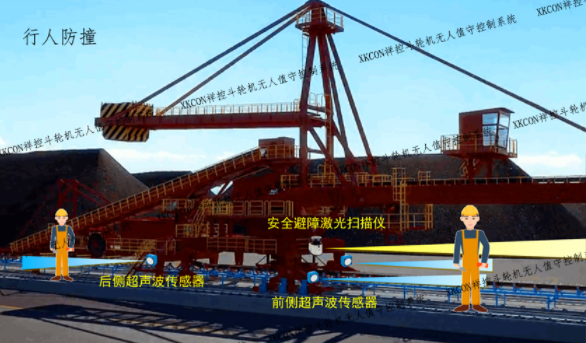 行人防撞
行人防撞3.行人防撞:在斗轮机行走轨道前后两侧分别安装超声波传感器,用于实现斗轮机行走过程中前后距离的测量,防止发生人员或者设备的碰撞,超声波传感器信号接入斗轮机综合控制系统,实现堆取料机整体的联锁保护。
4.悬臂防撞:在斗轮机悬臂两侧分别安装超声波障碍物检测装置,同时根据实时建立的煤垛模型与斗轮机悬臂实时空间位置,系统实时计算两者相对位置关系,当位置达到设定值时上位机进行预警,当达到极限值时自动停止旋转并提供报警信息,人工确认排除后自动恢复旋转,实现悬臂软硬双重防护。
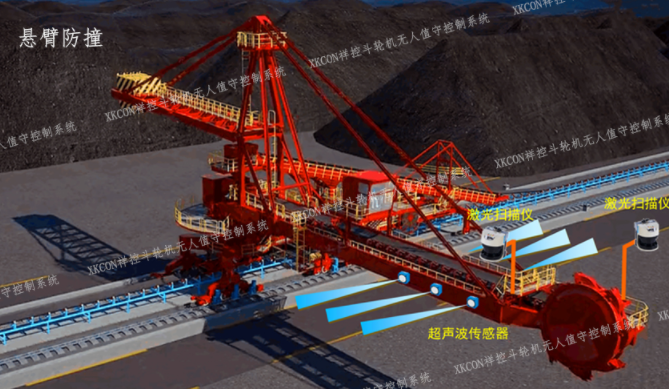 悬臂防撞
悬臂防撞开始作业后,XKCON祥控斗轮机全自动无人值守系统不再需要手动操作,全流程全自动控制,实现一键斗轮机启停,增强了斗轮机运行的安全性。
-
传感器
+关注
关注
2557文章
51738浏览量
758854 -
控制系统
+关注
关注
41文章
6697浏览量
111192 -
系统
+关注
关注
1文章
1023浏览量
21513
发布评论请先 登录
相关推荐
联核科技AGV无人叉车有哪些安全防护措施?

汽轮机故障诊断及解决方案
汽轮机在发电中的应用
汽轮机与煤气轮机的区别
汽轮机选型指南
汽轮机工作原理解析

最有效的云服务器网络安全防护措施
无人叉车的安全性能如何保证?有哪些防护机制?
斗轮机5G远程监控物联网系统解决方案
火电厂斗轮机PLC数据采集如何实现
MT6701 磁编码 IC:智能汽轮机叶片焊接系统的优化与升级
关于“低空安防”之卫星授时安全防护隔离装置,你知道吗?






 工商网监
工商网监
评论