 地平线参考算法:加速开发效率,释放极致计算性能
地平线参考算法:加速开发效率,释放极致计算性能
伴随着深度神经网络技术的发展,高阶自动驾驶算法正从传统2D感知向更先进的3D感知范式加速转变,这在为智能驾驶落地应用提供更多可能性的同时,也对实际开发效率提出了更高的挑战。在这个“快鱼吃慢鱼”的时代,“效率”已然成为产业玩家决胜智能驾驶“世界杯”的关键。抢滩智能驾驶技术高地,需要比快再快一点。
为了帮助产业开发者更高效地完成基于征程®系列芯片的性能验证与开发部署,地平线面向智能汽车产业客户与生态伙伴提供了参考算法开发加速包,避免对于典型任务的“重复造轮”,大幅降低算法开发门槛,加速产品原型的开发与迭代,实现计算与效率的并进“狂飙”。

软硬协同优化,发挥极致计算性能
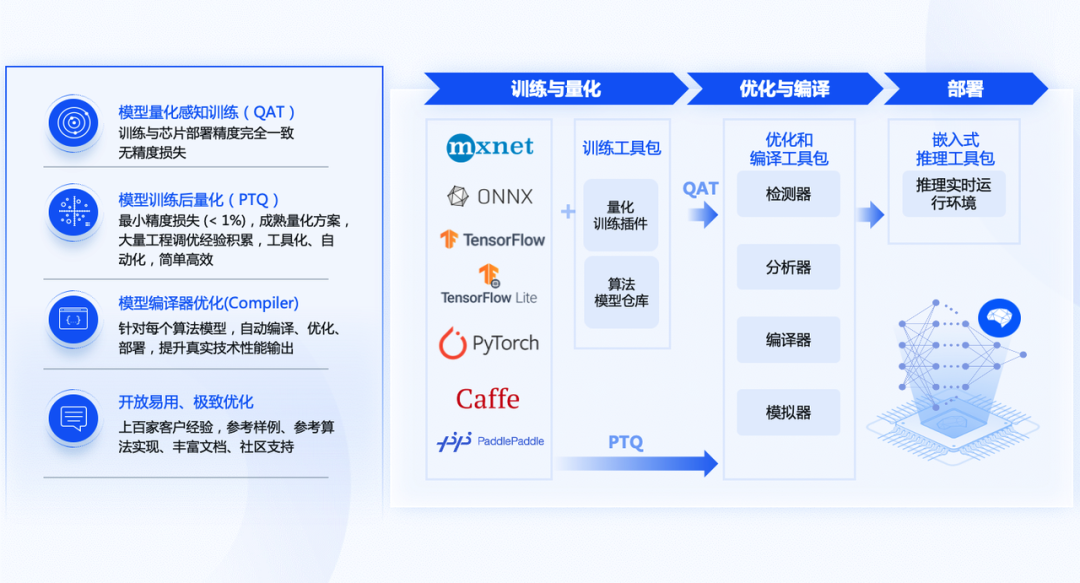
地平线作为最懂芯片的软件公司和最懂软件的芯片公司,始终践行“软硬结合”的技术理念,依托征程®系列芯片平台打造的地平线天工开物®芯片工具链,能够让算法充分受益软硬结合所带来的极致性能表现。
天工开物提供了算法开发全生命周期内所需的完善软件工具,能够满足模型量化、优化、编译、仿真、部署、调试等各个开发环节的需要。特别是在模型量化方面,提供量化感知训练(QAT)和训练后量化(PTQ)两类方式,可有效缩减模型大小,加速深度学习推理效率。同时,地平线在工具链基础之上,进一步提供了丰富的参考算法,全面满足开发者对计算性能与开发效率的要求与期待。
目前,地平线芯片工具链已积累近200家客户与生态伙伴的应用实践经验,研发水平各异的开发团队均能借助这一“得力武器”显著提升开发效率。经统计,通过天工开物芯片工具链在征程与旭日芯片上进行算法部署的用户,模型首次迁移成功率超过80%,性能和精度水平都能够充分满足业务预期。
降低软件开发门槛,灵活满足多样化开发需求
智能驾驶算法工程师在开发部署中主要涉及两类典型诉求,一方面是期待快速了解某个典型模型在征程芯片上的性能表现,另一方面则希望针对具体场景任务,高效完成在征程芯片上的部署调优。针对前者,地平线提供了丰富基础算法与相应的benchmark;对于后者,则提供一系列经过充分调优的场景参考算法。
基础参考算法
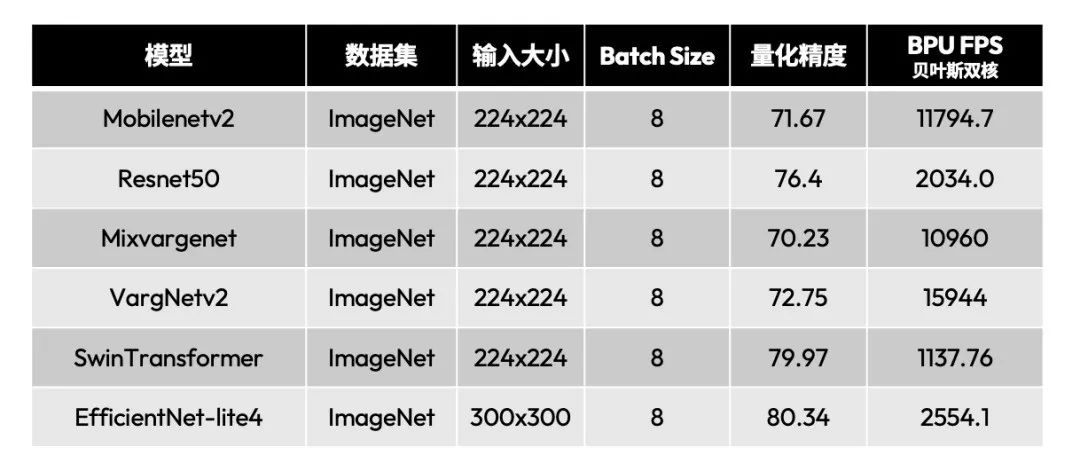
通过对智能驾驶算法演进与渐进式落地的持续探索,地平线构建了包含数百款算法模型的benchmark验证库,用于验证芯片工具链对于各类算法的广泛适用性,地平线还进一步筛选典型模型作为基础示例,帮助开发者快速开展benchmark性能评测,其中既包含产业普遍关注的常见模型,也包含了地平线推荐的基础模型。值得一提的是,为响应高阶智能驾驶开发需求,地平线还基于公版Transformer结构开发了适配于征程5的Swin-Transformer,能够高效支持SW-MSA和W-MSA结构,该模型在征程5芯片上的性能与端侧最强GPU上的部署性能相当。
除了基于公版改进的基础示例模型,地平线还开发提供了包含MixVarGENet在内,更为高效的自研模型。这类模型结构能够充分发挥征程5的算力优势,显著提升网络性能、减少访存时间。用户通过自由选用征程芯片高效支持的基础模型,在保证运行效率和任务表现的前提下,轻松实现自有算法的快速迁移与二次开发。
目前,相关基础示例模型均已随征程5芯片工具链发版,用户可直接通过「地平线开发者社区」获取相关文档与开发包,复现benchmark结果。
驾驶场景参考算法
智能驾驶嵌入式算法开发周期长、投入大、门槛高,benchmark能够帮助开发者快速了解典型模型在征程芯片上的性能表现,而在面向实际业务场景的开发过程中,工程师依然要在场景算法的设计与调优上花费不少精力。
面对此类挑战,地平线提炼了智能驾驶场景下的各类典型难题,并基于公开数据集提供了一系列经过充分优化的场景参考算法,当前已覆盖目标检测、光流预测、语义分割、车道线检测等常见自动驾驶任务,还提供支持摄像头与激光雷达等多类传感器的感知模型,面向高阶智能驾驶应用,地平线还提供支持Transformer、BEV等当下主流算法的先进模型示例,助力客户与生态伙伴快速布局高阶智能驾驶业务。
2D场景参考算法
地平线参考算法开放提供面向多种感知任务的2D场景模型,例如征程3、征程5芯片均可支持基于anchor-free实现的2D检测模型FCOS,同时开放提供包括U-Net、DeepLab等极具代表性的语义分割模型,以及GANet车道线检测、PWCNet光流预测等多类示例模型。

3D感知参考算法
在高阶自动驾驶感知算法中,3D感知势如破竹,成为主流技术应用方案。对此,地平线参考算法集成了基于Transformer的纯视觉BEV模型、基于雷达点云的3D检测模型以及单目3D目标检测算法。
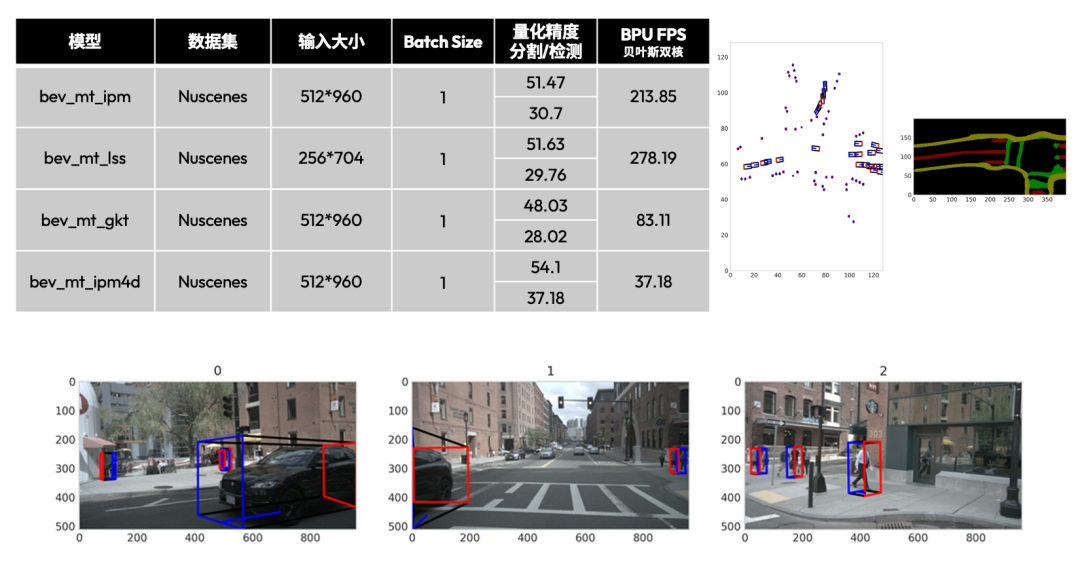
BEV算法能够从高处统观全局提供“上帝视角”,地平线所提供的BEV感知模型集成了目标检测和语义分割多重任务,可开放支持包括IPM、Transformer、LSS等多种转换方式,并在IPM基础上提供融合时序特征的bev\_ ipm\_temporal模型;基于Transformer大模型,更开放提供包括DETR 3D、GKT、PETR在内的多类感知示例。
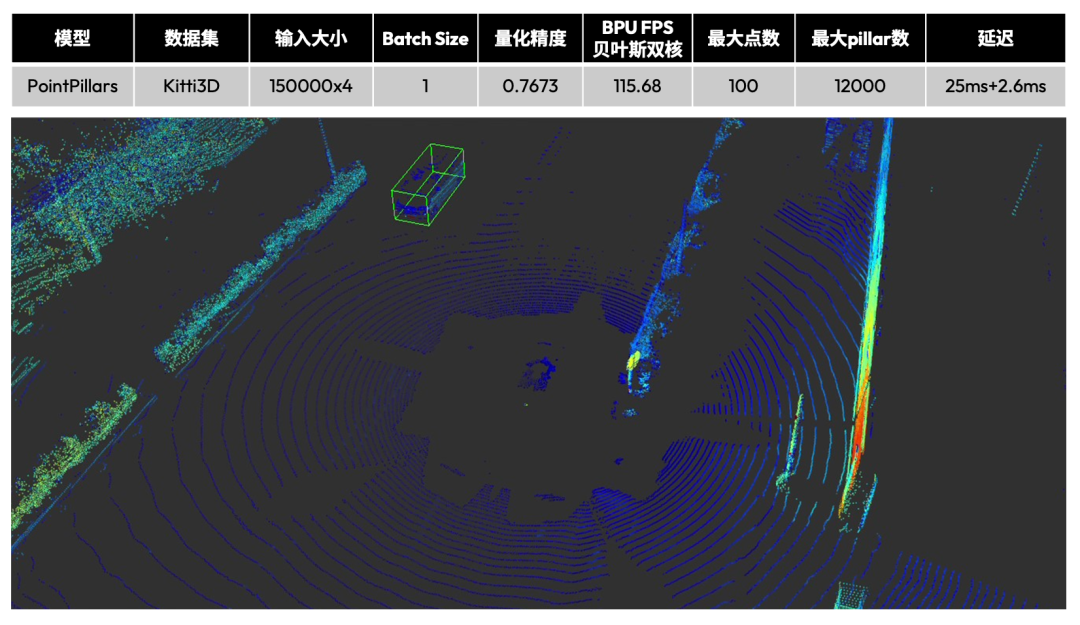
在纯视觉模型外,地平线针对基于激光雷达点云的3D检测,还提供了备受业界关注的PointPillars参考算法。通过对voxel-based模型中的复杂前处理进行针对性编译优化,该模型目前能在保证性能的情况下显著降低延时,让开发体验更加丝滑。
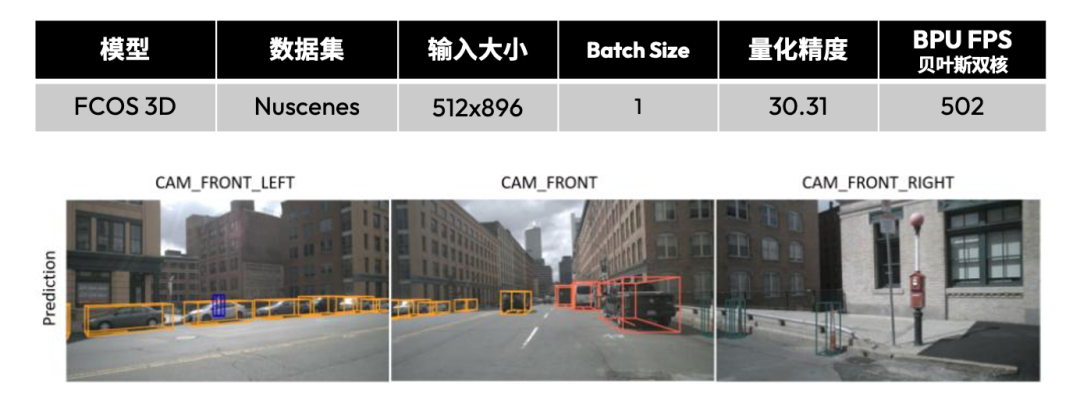
同时,地平线在FCOS 2D的基础上进一步提供FCOS 3D目标检测算法。通过使用征程5支持的高效模型结构efficientnet-b0替换backbone后,目前该示例模型性能可达双核502FPS,精度表现更具优势。
目前,以上经地平线充分优化的场景参考算法均已上线地平线开发者社区,未来还将持续拓展与丰富,为开发者提供更为开放与灵活的技术支持。
未来,地平线还将面向关键点检测、地图定位、多目标跟踪、轨迹预测、深度估计、视觉3D等更多场景算法,不断推动参考算法的研发扩展和升级迭代,让智能驾驶算法的开发部署不再艰难,让开发者收获远超预期的开发体验。
坚守Tier2定位,打造更开放的智能计算平台
在参考算法这一开发加速包以外,地平线基于软硬结合的前瞻技术理念,以“芯片+软件开发平台”为核心,已搭建起开放、成熟的智能计算开放平台。地平线通过持续提供高效能的征程系列芯片和配套完善的开发工具,全力支持客户与生态伙伴产品创新,为产业差异化需求提供最优解,助力中国智能汽车产业引领全球发展。
-
算法
+关注
关注
23文章
4637浏览量
93531 -
人工智能
+关注
关注
1799文章
47959浏览量
241161 -
自动驾驶
+关注
关注
785文章
13966浏览量
167346 -
地平线
+关注
关注
0文章
358浏览量
15074
发布评论请先 登录
相关推荐
地平线SuperDrive相关问答
地平线SuperDrive首发三大黑科技,决胜智能化竞争下半场

地平线SuperDrive首发三大黑科技
光庭信息获地平线坚实后盾奖
地平线荣获比亚迪“最佳合作伙伴奖”
智驾科技企业地平线登陆港交所
ETAS支持地平线征程6 AUTOSAR版本发布

地平线征程家族出货量破600万,智驾计算方案领跑市场
东软睿驰NeuSAR成功适配地平线征程6系列

地平线发布新一代Horizon SuperDrive™全场景智能驾驶解决方案






 工商网监
工商网监
评论