 DesignCon 解读 I《流浪地球2》中的机器狗“笨笨”走入现实
DesignCon 解读 I《流浪地球2》中的机器狗“笨笨”走入现实
一年一度的 DesignCon 是世界一流的高速通信和系统设计大会,在电子创新的核心硅谷汇集行业关键的技术发展与碰撞。在前不久刚刚落幕的2023 DesignCon 大会上,来自Boston Dynamics 的 Devin Billings 发表了题为《赋能机器人自主功能(Enabling Autonomous Robotic Capability)》主题演讲,并在现场为大家带来了一台真正的机器人。
Devin首先谈到了 Boston Dynamics 公司的发展历史:Boston Dynamics 于 1992 年在麻省理工学院成立,至今已经有 30 年历史。这 30 年来,公司一直致力于开发机器人,其销量超过 1000 台。2005-2009 年,他们开发了机器狗 Big Dog,由 Devin 本人亲自操刀。随后在 2021 年,Boston Dynamics 被现代汽车收购。如今,他们拥有 500 多名员工。著名的 Atlas 是一台双足机器人,其功率体重比与人类类似:

对于机器人领域的外行人士来说,Boston Dynamics 最出名的是一系列网络视频,展示了他们研发的机器人可以完成一些令人惊叹的动作,例如跑酷、跳舞;在最新的一部视频中,他们的机器人可以后空翻、旋转落下,然后将一个沉重的袋子扔到平台上。
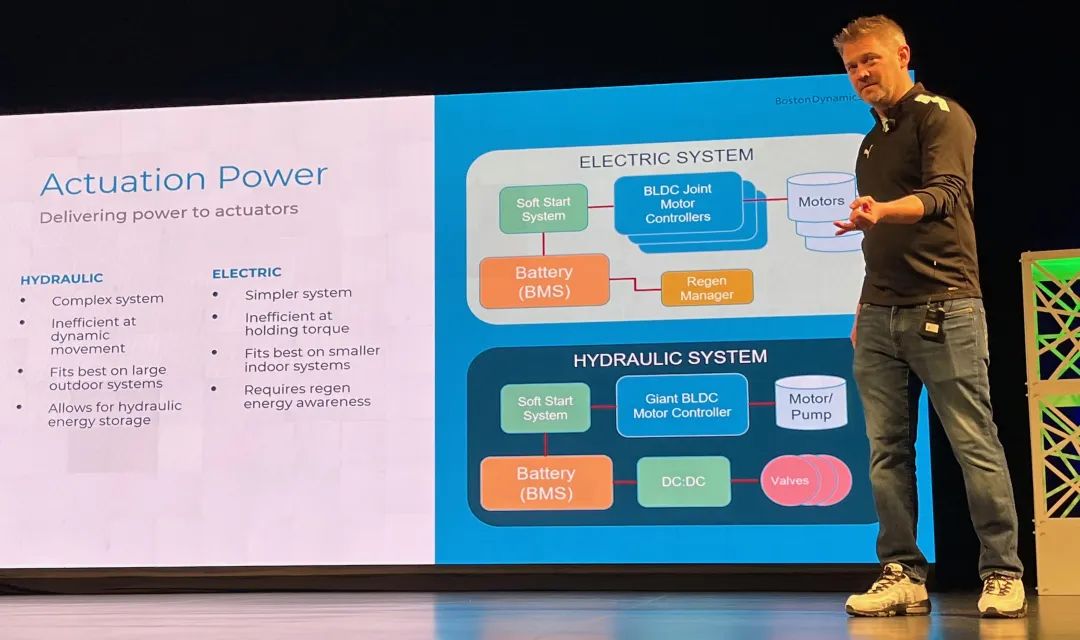
Devin 进而讲解了机器人制动器的应用。有两种选择:液压或电动。液压制动器最适合户外系统,特别是可以由内燃机提供动力的情况;而室内系统则最好使用电动制动器。电动制动器更简单,但不擅长一动不动地把持物体(例如沉重的箱子),因为它们需要持续不断的电力才能做到这一点;而这对于液压系统而言则是小菜一碟,只需关闭阀门,机器人就可以站立几个小时,而不会消耗电力。
接着,Devin 为现场观众带来了电动机器狗 Spot。Spot 从礼堂后面走下楼梯,在前排观众席的地方转身,然后又沿着阶梯走上了舞台。之所以转身,是因为它背后的摄像头经过了优化,可以向上看,因此可以爬楼梯。正面的摄像头也经过优化,可以向前或向下看,因此可以下楼梯。

在台上,Spot 展示了如何优雅地越过梯子,如下图所示:

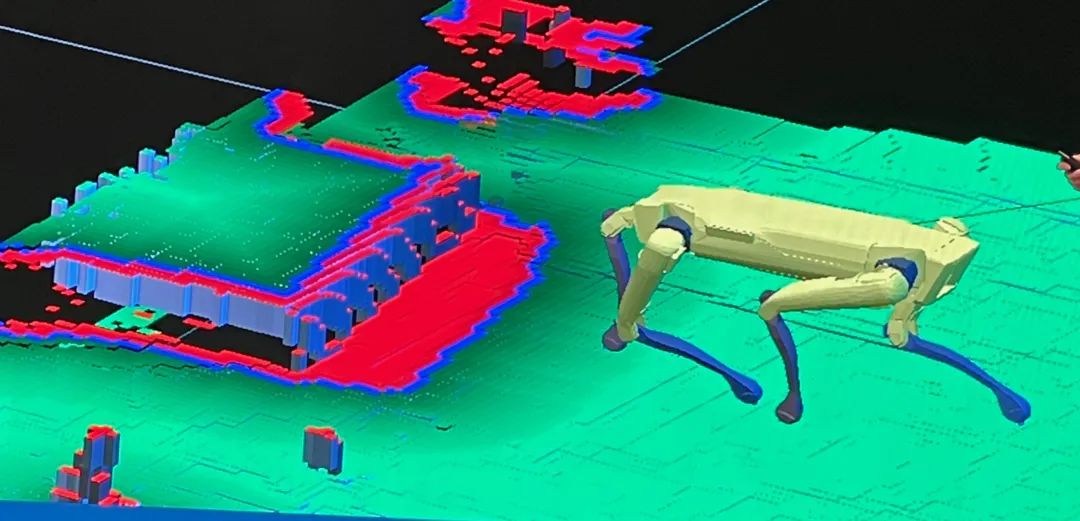
通过下图,我们可以了解一下 Spot 的大脑。绿色区域是 Spot 认为可以安全放下脚的位置,红色区域则是不安全的位置。在某种意义上,它还具有自我意识,知道自己的位置和四肢在哪里。
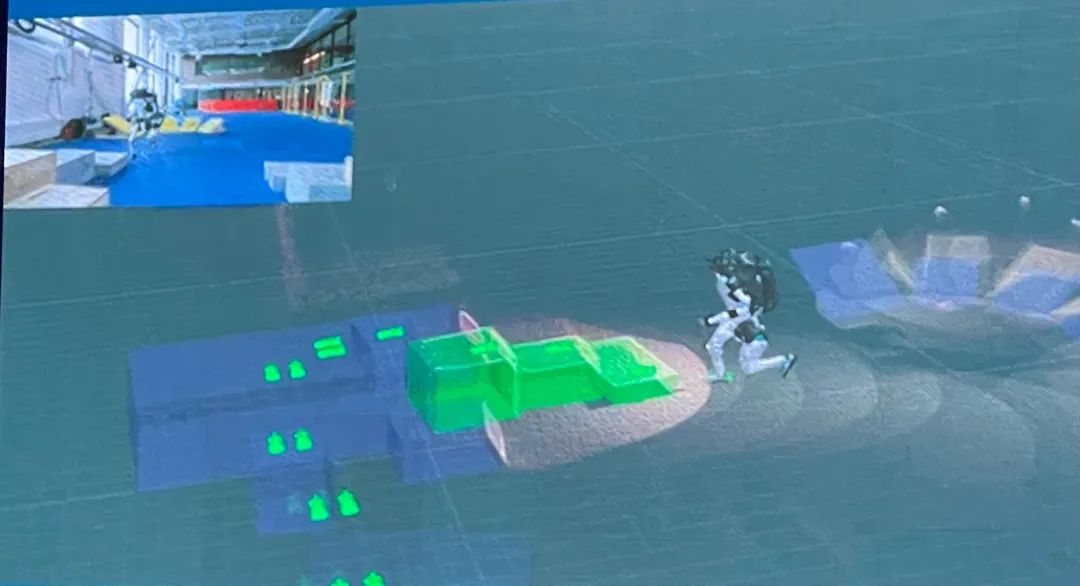
在下图中,我们可以看到 Atlas 正在思考应该把脚放在哪里。值得注意的是,落脚的位置不是精确的,因为 Atlas 可能要走过一段摇晃的木块(如上方视频所示);此外,和我们所有人走路一样,我们不会预测脚的落点,也不会以毫米级的精度来判断道路是否平坦。
Spot 并不只是 DesignCon 现场演讲中用来炫耀的噱头。它的后背上有两个带安装电池和以太网的隔舱,可用于安装摄像头或其他类型的显示器。
Devin 在现场展示了一段视频,内容是 Spot 正在检查建筑物(Boston Dynamics 办公室)内的灭火器:灭火器是否存在,是否可以轻松拿起等等。事实上,在很多场合,机器人都比人类的表现更好,如检查变电站。如果由人类员工检查变电站,出于安全考虑,需要先断电,这对供电企业来说不太友好。但即便在最坏的情况下,机器人是可以牺牲的,因此没有必要切断变电站的电源。同样,在任何有放射性的地点、地震后的建筑废墟以及类似的危险场合,Spot 可以代替人类(如检查灭火器),并且有时在人类无能为力的情况下,Spot 也可以完成任务。
-
机器人
+关注
关注
211文章
28399浏览量
207003 -
机器狗
+关注
关注
3文章
171浏览量
10127
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
从市场角度对机器人的基本解读

特朗普启用带激光雷达机器狗巡逻
RISC V的I2C操作
TPS389C0xEVM具有看门狗和I2C的多通道电压监控器评估模块

如何使用泰克示波器电流探头捕捉电流浪涌波形?
揭秘量子计算:科幻与现实的交汇点

连做两只机器狗,终于拿捏了这些算法……

软件看门狗和硬件看门狗的区别
为什么四足机器人设计常借鉴狗的外形特征?
制作一只3D打印的遥控机器狗
什么是I2C协议 I2C总线的控制逻辑

GD32 MCU硬件I2C不可靠不如软件I2C?来看看红枫派开发版的硬件I2C驱动如何做到稳得一批






 工商网监
工商网监
评论