 用SPAD512S在3D成像中的应用
用SPAD512S在3D成像中的应用

在从空间成像到生物医学显微镜、安全、工业检查和文化遗产等众多领域,对快速、高分辨率和低噪声3D成像的要求非常高。在这种情况下,传统的全光成像代表了3D成像领域最有前景的技术之一,因为其超高的时间分辨率:3D成像是在30M像素分辨率下每秒7帧的单次拍摄中实现的,对于1M像素分辨率为每秒180帧;无多个传感器,近场需要耗时的扫描或干涉技术。然而常规全光成像导致分辨率损失,这通常是不可接受的。
我们打破这种限制的策略包括将一个全新的和基础性的采用上一代硬件和软件解决方案。基本思想是通过使用新型传感器来利用存储在光的相关性中的信息实现一项非常雄心勃勃的任务的测量协议:高速(10–100 fps)量子全光成像(QPI)具有超低噪声和前所未有的性能分辨率和景深的组合。所开发的成像技术旨在:在成为第一个实际可用和适当的“量子”成像技术超出了经典成像模式的固有限制。
除了基础感兴趣的是,该技术的量子特性允许在3D上提取信息来自极低光子通量下的光相关性的图像,从而减少场景暴露于光照。对QPI的兴趣是由潜在的相对于其他已建立的3D成像技术的优点。实际上,其他与QPI不同,方法需要精细的干涉测量,如数字测量全息显微镜或相位恢复算法,如傅里叶全息图或快速脉冲照明,如飞行时间(TOF)成像。此外,QPI提供了无扫描显微镜模式的基础,克服了共聚焦方法。
量子全光相机有望提供全光成像的优势,主要是超快和免扫描的 3D 成像和重聚焦能 力,其性能是经典相机无法企及的。最先进的全光成像设备能够在单次拍摄中获取多视角图像.它们的工作原理是基于对给定场景中光的空间分布和传播方向的同时测量。获取的方向信息转化为快速 3D 成像所需的重聚焦能力、可增加的景深(DOF)和多视角 2D 图像的并行获取。
在最先进的全光照相机中,方向检测是通过在标准数码相机的主镜头和传感器之间插 入微透镜阵列来实现的。传感器获取复合信息,该复合信息允许识别检测到的光来自 的物点和透镜点。然而,由于结构(使用微透镜阵列)和基本(高斯极限)原因,图像分辨率与获 得的方向信息成反比地降低;因此,在基于简单强度测量的设备中,在衍射极限下的全光成像 被认为是无法实现的。
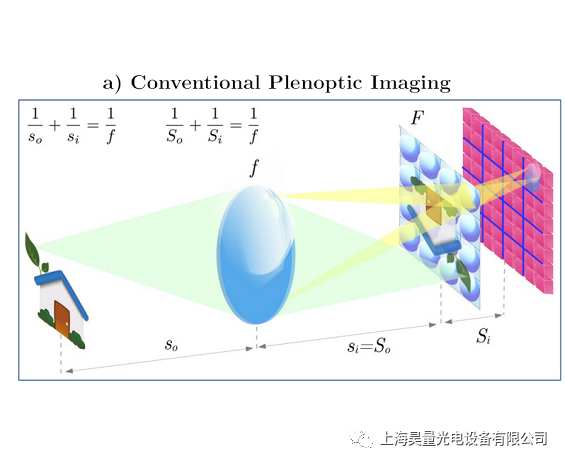
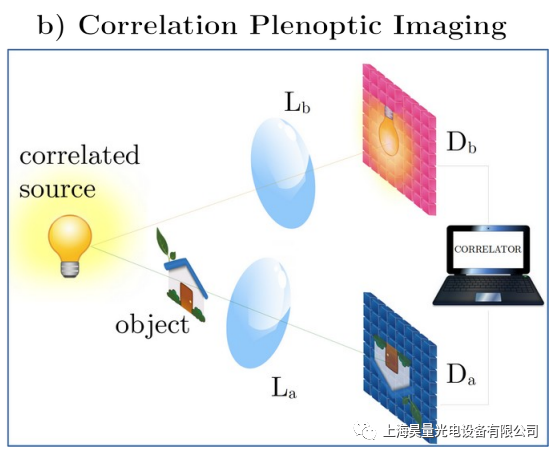
图(a)传统全光成像(PI)设备的方案:物体的图像聚焦在微透镜阵列上,而每个微透镜将主透镜 的图像聚焦在后面的像素上。这种配置需要与方向分辨率的增益成比例的空间分辨率的损失;(b)显示了相关全光成像(CPI)设置的方案,其中方向信息是通过将物体聚焦的传感器检索到的信号与收集 光源图像的传感器相关联而获得的。
为了实现全光成像,我们正在寻求一个超高性能的探测器,一个相关部分是通过用基于尖端技术的传感器(如单光子雪崩 二极管(SPAD)阵列)取代商用高分辨率传感器(如科学 CMOS 和 EMCCD 相机)来确定的。SPAD 基本上是一个光电二极管,其反向偏置电压高于其击穿电压,因此撞击其光敏区域的单个 光子可以产生电子-空穴对,从而触发次级载流子的雪崩,并在非常短的时间尺度(皮秒) 内产生大电流。这种操作方式被称为盖革模式。
SPAD输出电压由电子电路感测并直接转换成数字信号,进一步处理以存储光子到达和/或光子到达时间的二进制信息。从本质上来说,SPAD 可以被看作是一个具有精密时间精度的光子-数字转换装置。SPADs 也可以选通,以便只在短至几纳秒的时间窗口内敏感。如今,单个 SPAD 可以用作大型阵列的构建模块,每个像素电路都包含 SPAD 和即时光子处理逻辑和互连。
有几种 CMOS 工艺可供选择,可以定制关键 SPAD 性能指标和整体传感器或成像器架构.灵敏度和填充因子有一段时间落后于科学 CMOS 或 EMCCD,但近年来已大幅赶上。
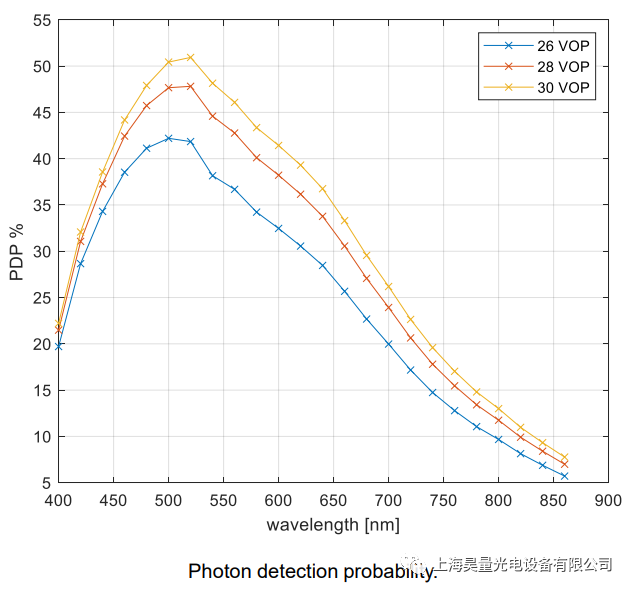
根据 QPI 的要求,我们选择使用由 EPFL AQUA laboratory group 开发的 SwisSPAD2 阵列,其特点是 512×512 像素分辨率,这是迄今为止最广泛、最先进的 SPAD 阵列之一。传感器内部由 256×512 像素的两半组成,以减少信号线上的负载和偏斜,实现更快的操作。这是一个纯粹的二进制门控成像器,即每个像素为每帧记录 0(无光子)或 1(一个或多个光子),读出噪声基本为零。传感器由 FPGA 控制,FPGA 产生门控电路和读出 序列的控制信号,并收集像素检测结果。在 FPGA 中,在发送到计算机/GPU 进行分析和存储之前,可以进一步处理得到的一位图像,例如,累积成多位图像。对于准直光,通过微透镜阵列,最大帧速率为 97.7 kfps,10.5%的自然填充因子可以提高 4-5 倍 (优化后的 模拟预计会有更高的值);在 520 纳米(700 纳米)和 6.5 伏过量偏压下,光子探测概率为 50% (25%)。该器件还具有低噪声(室温下每像素平均暗计数率通常低于 100 cps,中值约低 10 倍)和先进的纳秒门控电路。
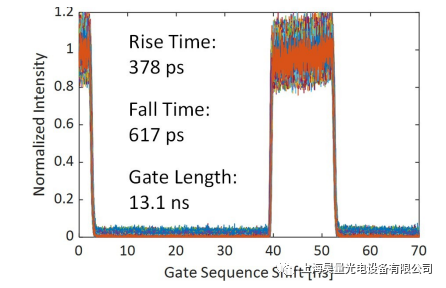
SwissSPAD2 门窗口轮廓。图中标注了转换时间和栅极宽度。栅极宽度可由用户编程,内部激光触发模式下的最小栅极宽度为 10.8 ns。
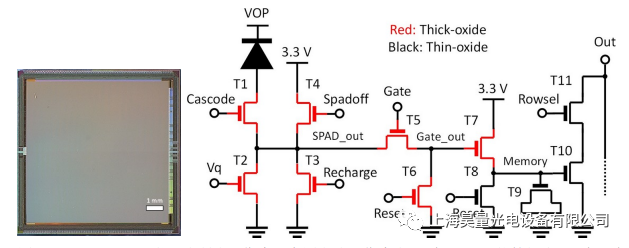
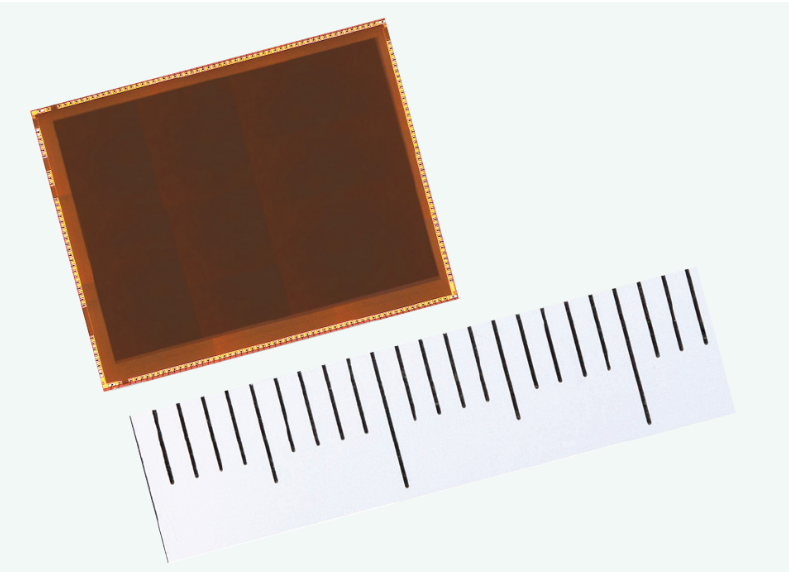
SwissSPAD2 显微照片(左)和像素示意图(右)。像素由 11 个 NMOS 晶体管组成,7 个具有厚氧化 物,4 个具有薄氧化物栅极。像素在其存储电容器中存储二进制光子计数。像素内门定义了相对于 20 MHz 外部触发信号的时间窗口,其中像素对光子敏感。
全光相机是一种全新的 3D 成像设备,利用动量-位置纠缠和光子数相关性来提供全光设备典型的重新聚焦和超快速、免扫描的 3D 成像能力,以及标准全光相机无法实现的显著增强的性能:衍射极限分辨率、大焦深和超低噪声;然而,为了使所提出的器件的量子优势有效并吸引最终用户,需要解决两个主要挑战。
首先,由于相关测量需要大量的帧 来提供可接受的信噪比,如果用商业上可获得的高分辨率相机来实现,量子全光成像(QPI)将需要几十秒到几分钟的采集时间。第二,为了检索 3D 图像或重新聚焦 2D 图像,对这大量数据的加工需要高性能和耗时的计算。为了应对这些挑战,我们正在开发高分辨率单光子雪崩光电二极管(SPAD)阵列和超快速电子设备的高性能低级编程,结合压缩传感和量子层析成像算法,旨在将采集和加工时间减少两个数量级。还将讨论开发 QPI 设备的途径。
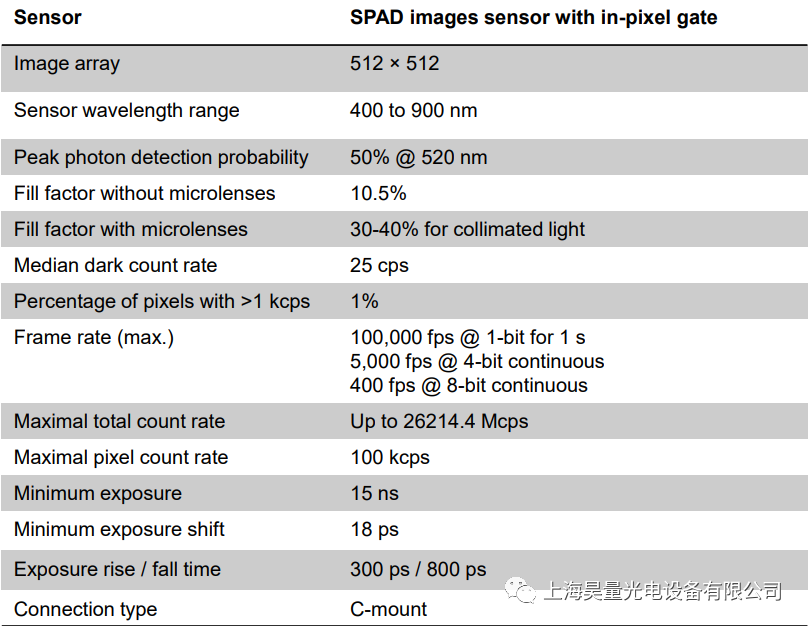
如下为昊量光电SPAD512S相机参数,看后你将对全光成像有新的了解及认识。

-
传感器
+关注
关注
2578文章
55567浏览量
794259 -
3D成像
+关注
关注
0文章
100浏览量
16909
发布评论请先 登录
3D雷达料位计应用行业有哪些
常见3D打印材料介绍及应用场景分析

简单认识3D SOI集成电路技术

深入解析DLP300S:开启低成本DLP 3D打印新时代
DLP301S:TI DLP® 3D打印机的理想之选
半导体“HBM和3D Stacked Memory”技术的详解
用SPAD也能做全彩图像传感器?
玩转 KiCad 3D模型的使用
季丰电子邀您相约2025国际3D视觉感知与应用大会
如何提高3D成像设备的部署和设计优势

【Milk-V Duo S 开发板免费体验】3- 尝试免费3D打印了开发板外壳
文件嵌入详解(一):在PCB封装库中嵌入3D模型



评论