 激光跟踪仪的机器坐标系是不固定的
激光跟踪仪的机器坐标系是不固定的

激光跟踪仪的机器坐标系是不固定的。
激光跟踪仪是采用球坐标系测量系统,在测量的时候,是需要操作者手拿测量靶球,激光跟踪仪射出一道激光主动跟踪测量靶球,在操作者将靶球接触待测工件表面时,激光跟踪仪精确采集该点的三维坐标并上传至测量软件,通过在工件上采集若干点,即可在软件上根据采集的点位坐标,拟合成需要的点、线、面、球等特征,分析拟合的特征,可得到对应的形位公差数据,也可将工件的三维模型导入测量软件,进行实物与数模的三维比对,得到三维比对数据,从而分析出实物与设计状态的差异,实现精准检测。
RobotMaster机器人检测校准套件
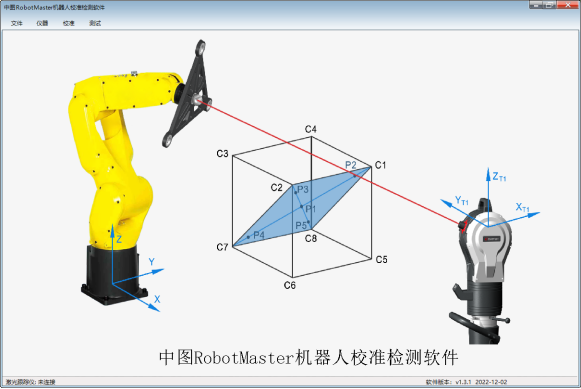
基于GTS激光跟踪仪的RobotMaster机器人套件为工业机器人空间绝对位置精度测量标定和性能检测提供高效可行的解决方案,既提供基于光学靶球的经济方案,也提供基于6D姿态智能传感器的增强方案。
●机器人标定校准软件
根据机器人的D-H参数建立机器人校准数学模型,进行机器人零位校准,机器人D-H参数校准,机器人TCP中心点精度校准。在不改变现有机器人任何结构和硬件尺寸的条件下,通过机器人校准标定软件有效的提高机器人绝对位姿精度。
●机器人性能检测软件
按照ISO 9283工业机器人性能规范及其实验方法完成机器人性能检测,检测内容包括:
机器人位姿准确度、位姿重复性、多方向位姿准确度变动、距离准确度、距离重复性、位置稳定时间、位置超调量、位姿特性漂移、互换性、轨迹准确度、轨迹重复性、拐角偏差、轨迹速度特性、静态柔顺性等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器
+关注
关注
0文章
801浏览量
41960 -
激光跟踪仪
+关注
关注
0文章
86浏览量
9249
发布评论请先 登录
相关推荐
热点推荐
固定式测斜仪日常维护成本分析
固定式测斜仪作为长期自动化监测的关键设备,其日常维护成本是用户普遍关心的问题。实际上,由于设计优化与技术改进,现代固定式测斜仪的维护成本已控制在合理范围内,整体维护负担并不高。现代

机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
;
移动底盘跟随目标物体,保持安全距离;
机器人机械臂抓取物体,完成“识别-跟随-抓取”闭环。
名词预先了解:
手眼转换:将相机看到的物体坐标转换到机械臂可执行的坐标系下。
逆运动学:给定末端目标位姿,反
发表于 04-10 21:23
ZEISS GEAR PRO 一键搞定特殊齿轮高精度测量
软件提供了一套高精度、符合标准的理想测量方案。 01 装夹方案 如下图所示,用V形铁水平固定工件。根据图纸要求,分别在ME=2mm和ME=6mm两个截面上进行测量。 02 建立坐标系 依据图纸基准 A、B、C-D,使用ZEISS CALYPSO建立数学

磐时助力坐标系纯机电线控制动系统通过TÜV北德ISO 26262 ASIL-D功能安全认证
作为线控底盘领域的先行者,坐标系智能科技有限公司(以下简称“坐标系”)始终以安全为技术落地的核心基石。基于在2025年展开的EMB功能安全前瞻布局,当前,在磐时的专业技术支持下,坐标系纯机电线控制

一次讲清TOA 测距与卫星定位基础:原理 + 坐标系
TOA 测距是定位技术核心!本文从二维雾号定位到卫星三维定位,详解距离交会原理与两大参考坐标系,帮工程师快速掌握 GNSS 与车载定位基础逻辑。

矢量网络分析仪与示波器的技术分野
在电子测量领域,矢量网络分析仪与示波器如同两个并行的坐标系,分别以频域和时域为基准构建起不同的测量维度。前者聚焦于射频微波信号的相位与幅度解析,后者则专注于电信号随时间变化的波形捕捉。这种本质性

矢量网络分析仪与示波器的区别
在电子测量领域,矢量网络分析仪与示波器如同两个并行的坐标系,分别以频域和时域为基准构建起不同的测量维度。前者聚焦于射频微波信号的相位与幅度解析,后者则专注于电信号随时间变化的波形捕捉。这种本质性的差异决定了二者在功能定位、应用场景和技术架构上的显著分野。
中图仪器高精度三坐标,赋能安徽汽车零部件产业计量
近日,安庆市计量测试所迎来一批重量级“新成员”——由深圳市中图仪器股份有限公司自主研发的固定桥式三坐标测量机、全自动影像仪、光栅测长机及激光干涉仪
三坐标和激光跟踪仪的不同之处
跟踪仪基于球坐标系,通过激光束追踪目标反射镜(靶球),实时测量距离与角度,动态捕捉目标点坐标。支持无靶标扫描(如LeicaATS600)。特

激光干涉仪:解锁协作机器人DD马达的精度密码
当协作机器人需要执行微米级的精密任务时,一个隐形挑战浮出水面:如何确保其核心动力单元DD马达的旋转精度达到角秒级?答案藏在一束激光的干涉条纹之中。解决方案:SJ6000激光干涉仪+角度

激光跟踪仪为生命护航:X射线计算机断层扫描成像系统检测的应用
对设备安装过程中关键部件的几何精度进行有效把控,致使设备整体性能和稳定性受到影响。2、运动部件静态检测效率与便捷性欠佳:针对CT设备运动部件的检测,当前主要采用激光干涉仪开展单轴线性精度或旋转精度等进行
发表于 07-09 13:20
•0次下载
鸿蒙地图功能开发【3. 代码开发】##地图开发##
以后再去更新这个配置参数。
第二,一定要注意经纬度坐标的坐标系。从大家的惯性认知中,既然我是通过原生鸿蒙的Location Kit获取的经纬度坐标,那么当然适用于原生鸿蒙的Map Kit的地图咯。我最近
发表于 06-29 22:59
传感器数据计算质心位移轨迹,结果不理想
处理
2、使用滤波后的数据,将四元数转换成旋转矩阵
3、利用旋转矩阵将加速度数据从传感器坐标系转换到全局坐标系,之后直接进行z轴的重力补偿
4、去除z轴的全局平均值
5、对加速度直接梯形积分得到速度
发表于 06-24 17:07
创想智控激光焊缝跟踪系统助力管道行业专机埋弧焊智能化升级
在如今的工业制造领域,智能化和自动化成为提升效率和质量的重要力量,管道行业作为基础设施建设的重要组成部分,焊接的智能化升级是必不可少的。面对传统埋弧焊中存在的诸多挑战,创想智控自主研发的激光焊缝跟踪
固定式测斜仪的数据存储和导出方式有哪些?
在工程安全监测领域,固定式测斜仪凭借其高精度和自动化优势,成为监测结构物位移的重要工具。而数据的高效存储与导出,直接影响监测结果的实时性与可靠性。下面以南京峟思YS-1A型固定测斜仪为




评论