 KMT39磁阻角度传感器对电机的影响
KMT39磁阻角度传感器对电机的影响

大家好,我是【广州工控传感★科技】KMT39磁阻角度传感器事业部,张工。
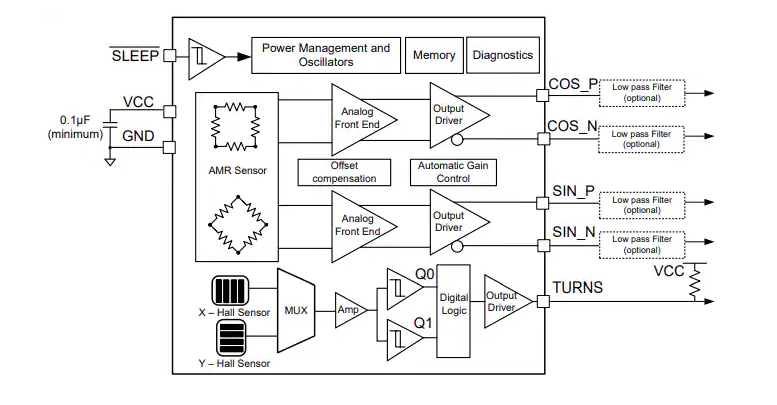
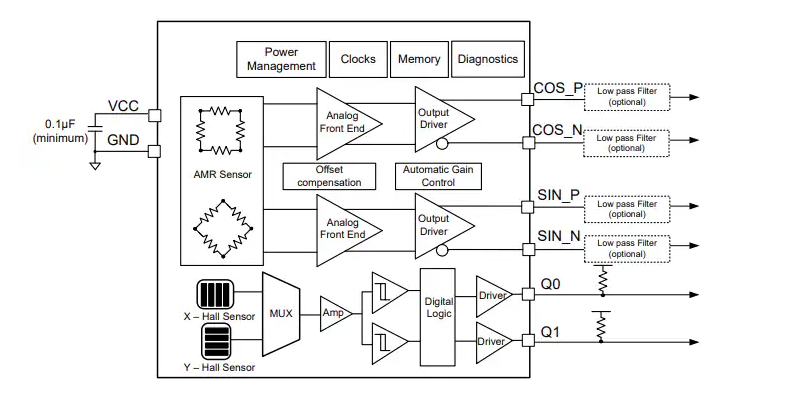
KMT39磁性AMR角度传感器包含两个平行的惠斯通电桥,每个电桥可以测量 45 度。 平行于芯片的表面上的旋转磁场将因此提供两种独立的正弦曲线输出信号,一种按照 cos函数计算,另一种按照函数计算,在传感器和磁场方向之间形成角度。KMT32B 磁场G-MRCO-048传感器适合在常规磁场强度 25 kA/m 的情况下(例如,在室温下距离为 5.2 mm 时,来自生成的磁场强度)高精确角度测量应用。如降低精度,KMT32B AMR 角度传感器可用于磁场强度 H0 的情况(室温下对地磁场产生的影响!)。大多数磁体的磁场强度随温度改变,但磁场方向不变。
那么电机里有没有传感器,都有什么影响呢?
许多这些应用由电机的速度和扭矩控制。 电机的启动和驱动方式大致可分为①带位置传感器驱动”和②不带位置传感器驱动两种。

①电机由位置传感器驱动 KMT39:需要使用传感器检测电机转速和旋转位置的电机驱动方式。
② 不带位置传感器的电机驱动器 G-MRCO-048:不需要上述传感器的电机驱动方式
①中型电机由传感器KMT32B驱动的优点:在启动和驱动时能够准确检测电机的位置和旋转,通过电机驱动器实现平滑的电机驱动和从低速到高速的旋转控制。 内置硬连线逻辑控制器。 缺点:电机中必须安装霍尔元件/霍尔IC等传感器,因此需要考虑传感器的安装位置精度以及传感器与电机控制器之间的接线。
②中型电机G-MRCO-016无传感器驱动的优点:可用于驱动无法物理配置传感器的电机和暴露于高温、水、油等不利环境的电机。
对于 KMT36H 的无传感器驱动,还有一种方法是通过 MCU 外部带有硬接线逻辑的专用控制器,从外部强制换向信号开始,然后将速度 EMF 用作位置信号。 综上所述,每种方法都有其优点和缺点。 因此,需要根据电机的使用环境、所需的可靠性程度、电机负载的种类(恒转矩、恒输出、平方转矩),选择适合所需特性的电机驱动方式。
-
传感器
+关注
关注
2578文章
55772浏览量
795106 -
电机
+关注
关注
145文章
9740浏览量
154986 -
磁阻传感器
+关注
关注
0文章
82浏览量
18655
发布评论请先 登录
非接触磁阻架构,车载角度测量技术方案

探索VCE1715角度传感器:高精度测量的理想之选
MT6813 磁角度传感器芯片核心应用场景技术解析
MT6813 磁角度传感器在伺服电机位置检测中的应用
MAX9924–MAX9927:可变磁阻传感器接口的卓越之选
MAX9924–MAX9927:可变磁阻传感器接口的卓越之选
探索TLE49SR:高性能角度传感器的卓越之选
角度传感器原理、技术与实用指南

Littelfuse公司磁性传感器产品组合扩展-高精度TMR角度传感器
使用位置传感器进行无刷电机控制

Texas Instruments TMAG6181-Q1角度传感器数据手册
Texas Instruments TMAG6180-Q1角度传感器数据手册
基于锁相环的无轴承同步磁阻电机无速度传感器检测技术
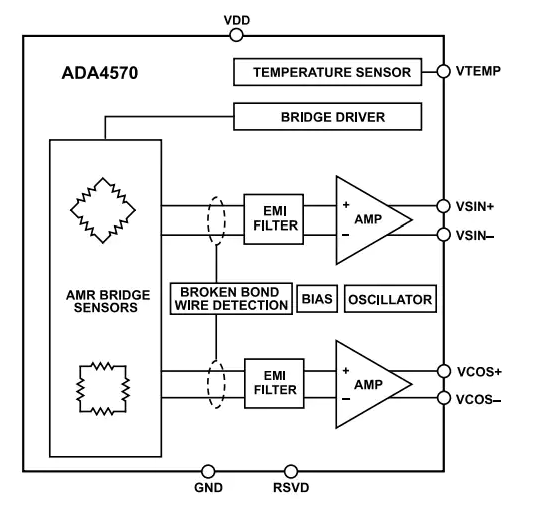
Analog Devices Inc. AD4570 AMR磁阻传感器数据手册



评论