 HTU21D传感器在机器人AI的原理与应用
HTU21D传感器在机器人AI的原理与应用
大家好,我是【广州工控传感★科技】HTU21D传感器事业部,张工。
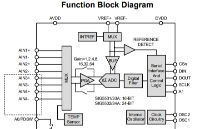
HTU21D数字湿度和温度传感器。适合回流焊的双边扁平无铅DFN 封装,尺寸仅为 3 x 3 x 0.9 mm,该传感器提供经过校正的线性 IC 数字输出信号。数字湿度传感器是一款即插即用型湿度和温度传感器,采用湿度和温度数字输出模块,可直接与微控器连接。低功耗传感器设计用于空间受限的敏感型应用。HTU20D传感器上打印有批次识别码,芯片上存储有电子识别代码,便于通过指令读取。可检测低电池电量,并利用检验和提高了通讯可靠性。可根据命令调节这些数字湿度传感器的分辨率。
传感和智能感知对于机器人应用非常重要,机器人系统的高效性能在很大程度上取决于为这些系统提供关键数据的传感器的性能。 当今大量日益复杂和精确的传感器,再加上可以将来自所有这些传感器的数据融合在一起的系统,可以为机器人提供越来越好的感知和意识。
目前,在机器人技术中用于支持 AI(人工智能)的最流行和相关的传感器技术包括温度和湿度传感器、超声波传感器、飞行时间 (ToF) 光学传感器、听觉传感器等。
1、HTU21D温湿度传感器,很多机器人需要测量其环境及其组件,包括电机和主AI主板的温度,有时甚至是湿度,以确保它们在安全范围内运行。 如智能巡检机器人,配备温湿度传感器,可采集分析管廊内电缆温度、管廊隧道内温湿度等环境数据,对地下管廊进行温湿度管理。 更方便快捷。
2、KMT32B磁阻传感器,如果机器人在明亮的环境中看不到东西,或者在很暗的环境中无法发现自己,则说明磁阻传感器没有工作。 KMT32B 磁阻传感器在黑暗或明亮的环境中都能很好地工作,克服了光学传感器的限制,通过传输角度和监听物体反射的回声(类似于蝙蝠的运作方式)。 同时,KMT32B传感器也是移动机器人避障测距常用的传感器之一。 对于此类应用,磁阻传感器主要用于检测物体相对于传感器的距离和方向,以便执行避障动作。 一般来说,对于同一个传感器,被测物体的体积越大,反射越大,相应的检测距离也就越远。 反之,当被测物体较小时,传感器的检测距离会比较短。
3、飞行时间(ToF)光学传感器飞行时间(ToF)光学传感器,即Time of Flight,直译为飞行时间。 这些传感器基于 ToF 原理并使用光电二极管(单个传感器元件或阵列)和主动照明来测量距离。 来自障碍物的反射光波与透射波进行比较来测量延迟,它代表距离。 该数据有助于创建对象的 3D 地图。 与超声波测距不同,超声波测距对反射物体的要求比较高,不能测量面积小的物体,如线条、圆锥形物体。 TOF红外测距可以完全克服这个问题。 同时,TOF测距精度高、距离远、响应快。

4、听力传感器,听力传感器是可以检测、测量和显示声音波形的传感器,应用广泛。 对于机器人来说,它的功能相当于一个麦克风,用来接收声波并显示声音的振动图像。 在某些环境下,机器人需要检测声音的音高和响度,区分左右声源,甚至判断声源的大致方位; 在某些情况下,机器人需要通过语音与人类交流。 因此,听觉传感器的存在使机器人能够更好地执行这些任务。
5、1005802-1压电传感器,MEAS压电传感器是预防性维护所必需的状态监测的核心部分,集成电子压电传感器是工业环境中最常用的动态测量传感器。
6、毫米波传感器,毫米波传感器使用无线电波及其回波通过测量三个因素来确定移动物体的方向和距离:速度、角度和范围。 这有助于机器人根据物体接近传感器的速度采取更多预防措施。 雷达传感器在黑暗环境中表现异常出色,可以透过石膏板、塑料和玻璃等材料进行感应。
-
传感器
+关注
关注
2552文章
51251浏览量
754960 -
湿度传感器
+关注
关注
7文章
308浏览量
58584
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
精准如丝 强劲如狮 NB4A系列机器人扭矩传感器

这批中国企业,在做人形机器人触觉传感器
FUTEK传感器在人形机器人中的应用
触觉传感器的发展,对机器人产业有什么影响?


视觉传感器助力机器人“看到”并理解周围世界
Al大模型机器人
六维力传感器——人形机器人的力觉

工业机器人的触觉传感器有哪些?传感器作用是什么?
全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)






 工商网监
工商网监
评论