 KMA36磁阻传感器线性测量应用原理
KMA36磁阻传感器线性测量应用原理

大家好,我是【广州工控传感★科技】磁阻传感器事业部,张工。
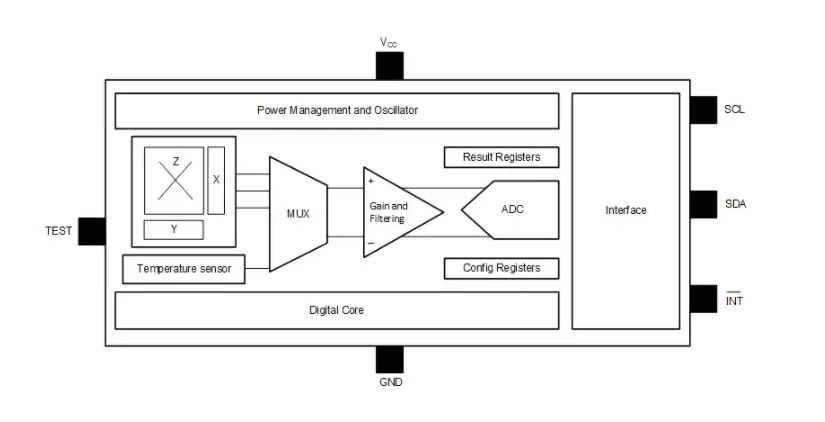
KMA36是一款精确测量转角或直线位移的通用磁性编码器。芯片包括一个磁阻元件,模数转换器和信号处理系统。利用AMR各向异性磁阻,KMA36可以非接触测量360°角位移以及直线位移。传感器的睡眠/低功耗模式和I2C唤醒功能可以让电池供电设备。数据可以通过PWM或两线(SDA,SCL)通讯总线传输。
通常,KMA36 磁阻传感器用于测量磁场角度。 此功能通常用于旋转测量,但也可用于线性测量。 这是由于磁场在整个磁铁上旋转了 180°。 因此,当磁铁直线运动时,KMA36 会识别出这种磁场旋转。 传感器信号可以作为 IC(内部集成电路)或 PWM(脉冲宽度调制)信号接收。

使用条形磁铁进行线性测量 (14mm x 4mm)
在此示例中,使用的棒状磁铁由 N38 级 NdFeB 烧结而成,几何形状长 14 毫米,直径 4 毫米,可在许多应用中找到。
校准
KMA36 传感器和条形磁铁需要水平对齐。 条形磁铁和传感器之间的气隙取决于磁铁产生的磁场强度。 KMA36 设计用于在 25-60 kA/m 的磁场强度下工作。 在本例中,气隙选择为 1mm。 这是为了使条形磁铁按照指令直线移动。
配置
开始测量之前,需要通过IC使用以下参数配置传感器:

结果
由于磁心位于 KMA36 正面的中心,传感器读数在 14 毫米的移动过程中显示出线性关系。 显示了具有 1 mm 气隙的 KMA36 不同位置的传感器响应。

显示了传感器的输出,几乎是线性的。 红线表示以 μm 为单位的绝对位置误差,最大误差为 ~/- 90 μm。 误差是信号与理想线性过程之间的差异。
综上所述
已经完成了使用棒状磁铁的线性测量设置中的有效磁铁运动范围(线性行为)的分析,并检测到大约 14 毫米的线性范围,绝对最大误差为 150 微米。使用 KMA36 阵列和磁棒进行线性测量 (14mm x 4mm)在本应用说明中,我们提供了一个使用 KMA36 传感器阵列测量 60mm 线性磁铁运动的示例。 在此示例中,我们使用了由烧结钕铁硼制成的圆柱形条形磁铁,等级为 N38,几何形状长 14 毫米,直径 4 毫米。
结论
为了进行这种测量,传感器和磁棒需要在相同的高度对齐。 条形磁铁和传感器之间的气隙取决于磁铁产生的磁场强度。 KMA36 设计用于在 15 至 60 kA/m 的磁场强度范围内工作。 在本例中,气隙选择为 1mm。 如图 所示,条形磁铁直线移动。
结果
当条形磁铁在 4 KMA36 传感器系统前线性移动时,每个传感器都会以特征信号输出曲线进行响应。 与前面的示例一样,如果磁铁在传感器前面移动,则输出更加线性。 有几种方法可以确定使用四个 KMA 传感器中的哪一个来确定实际位置。

相邻放置的两个传感器的线性范围必须重叠,以确保至少有一个传感器始终在其线性范围内。 评估此重叠区域中的信号有不同的可能性。 例如,信号可以被加权或以定义的值切换。 至少选择哪种方法并不重要,重要的是信号与前一个传感器的偏移量正确相加。
综上所述
分析了所有四个传感器的可用线性区域。 下图显示了所有四个线性区域的总和。 整个系统表现出近似线性的行为,延伸约 60 毫米。 合适的拟合算法可以使位置误差小于 1% FS。
-
传感器
+关注
关注
2578文章
55756浏览量
795036 -
测量
+关注
关注
10文章
5761浏览量
117066
发布评论请先 登录
面向测量初学者的入门专栏: 各种测量仪器介绍:振动测量(传感器)篇

探索VCE1715角度传感器:高精度测量的理想之选
深入解析LM1815自适应可变磁阻传感器放大器
MAX9924–MAX9927:可变磁阻传感器接口的卓越之选
MAX9924–MAX9927:可变磁阻传感器接口的卓越之选
MAX9924 - MAX9927:可变磁阻传感器接口的卓越之选
MAX9924–MAX9927:可变磁阻传感器接口的卓越选择
如何优化气体压力传感器性能,提高传感器测量精度?

TMAG5273线性3D霍尔效应传感器的技术解析与应用
从原理到实践:MT9101线性霍尔传感器的设计要点与全参数解读
基于锁相环的无轴承同步磁阻电机无速度传感器检测技术
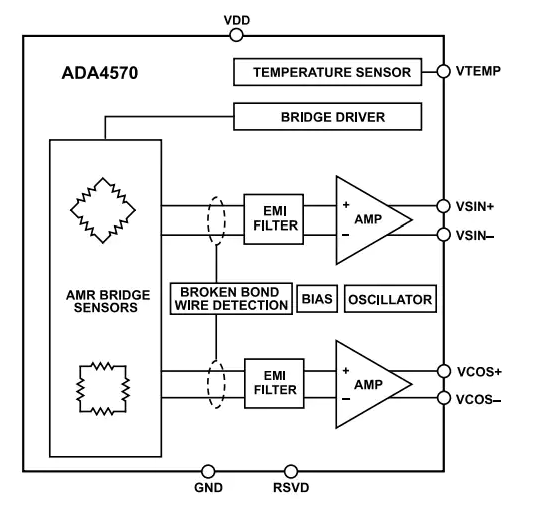
Analog Devices Inc. AD4570 AMR磁阻传感器数据手册
国产替代 | 芯森电子AN4V724线性霍尔电流传感器的介绍及其应用




评论