 看完这一篇,HPM6000系列PWM波尽在掌握(上)
看完这一篇,HPM6000系列PWM波尽在掌握(上)
概 述
在进行电机类、电源类应用开发时,如何使用PWM定时器模块灵活、高效的实现所需 PWM波形的输出,是众多开发者关注的问题。先楫半导体已发布的HPM6000系列芯片上,均带有PWM定时器模块。与普通定时器产生的PWM相比,其产生的PWM可方便的配置为互补PWM对,并带有强制输出、死区插入、故障封锁、影子寄存器等功能。
本文将简单介绍PWM定时器模块内的一些概念,以图文的形式帮助开发者理解PWM定时器模块的运行方式。然后辅以大量代码实例,介绍了如何生成普通 PWM、互补 PWM、同步 PWM、错相 PWM,以及PWM如何使用ACMP封波。帮助广大开发者更好地使用 PWM 定时器模块实现自己所需的功能。
1
24+4 位向上计数器
一个 PWM 定时器模块内共有 3 个 24+4 位寄存器,分别为 STA、CNT、RLD。STA 与 RLD 为计数器计数的起点和终点;CNT 内保存着当前时刻的计数值。计数器从 STA 开始计数,达到 RLD 后重新从 STA 计数,一个又一个周期的循环往复,周期为 RLD-STA+1。
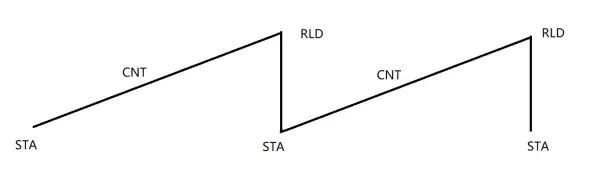
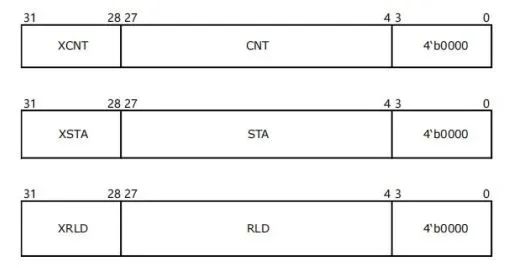
4 位拓展位,为开发者提供了更多样的计数信息:每当 CNT 计数到 RLD时,会产生 RLD 事件(可以生成中断或 DMA 请求);若 XRLD 不为 0,则每当 CNT 计数到 RLD 时,XCNT 加 1,当 XCNT 等于 XRLD 时,产生 XRLD 事件(可以生成中断或 DMA 请求)。
2
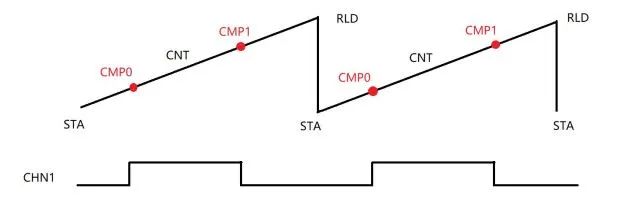
一个 PWM 定时器具有 16~24 个通道,以及 24 个比较器 CMPx(x=1~24)。比较器 CMPx 可以理解为 CNT 计数过程中的触发开关:每当CNT 等于 CMPx 时,该通道 PWM 输出会进行翻转。
开发者可以配置将哪些 CMPx 安装在目标通道上:配置方法为指定 x,再指定用于该通道比较器的数量 n,结果就是 CMPx、CMPx+1、... 、CMPx+n-1 比较器被应用于该通道。
假设我们对通道 1 进行配置,x=0,n=2,则如下图所示:
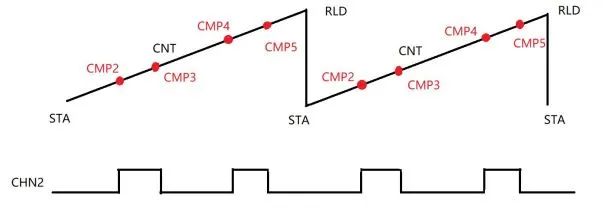
假设我们对通道 2 进行配置,x=2,n=4,则如下图所示:
3
影子寄存器
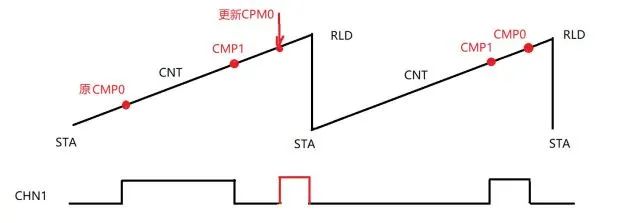
影子寄存器的作用是为 PWM 定时器的部分关键寄存器提供保护。在 CPU访问寄存器的时候,实质上改变的是它的影子寄存器,新值并不马上生效。只有在指定的时刻,才把影子寄存器的值更新到寄存器,防止即时生效的方式导致 PWM 输出波形异常,导致炸管子、短路等事故发生。
在芯片内,STA、RLD、CMPx、FRCMD 寄存器带有影子寄存器(这 4 类寄存器的更新会影响 PWM 的波形)。总体而言,HPM 芯片提供了 4 种方式将影子寄存器更新到控制寄存器内,分别为:
软件将 SHCR [SHLK]位置 1 时生效
即时生效
某个 CMPx 比较事件发生时生效
SHRLDSYNCI 上捕获到上升沿时生效
通常建议开发者配置影子寄存器为“某个 CMPx 比较事件发生时生效”,其它 3 种方式更新影子寄存器到寄存器内时,多多少少不能保证此时 PWM 输出的状态,可能会导致 PWM 波形异常。只有在开发者确定用其它 3 种更新方式不会导致硬件故障时,才推荐使用。下图展示了 CPU 以实时方式将影子寄存器更新到寄存器内可能产生的异常。
4
同步输入 SYNCI 与同步定时器 SYNT
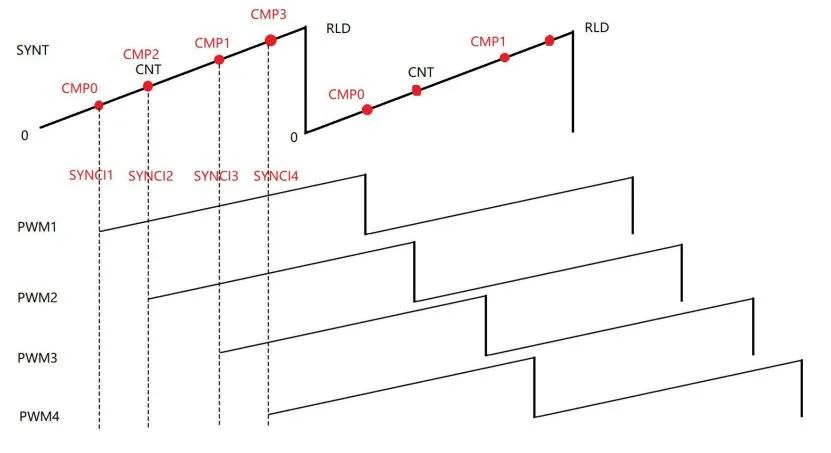
同步输入 SYNCI 的作用是,当此信号有效时 CNT 的值被强制为 STA,SYNCI 无效后 CNT 开始正常计时。当需要多个 PWM 定时器的时基相同或错相时,操作PWM 定时器的 SYNCI 信号即可达到目标。
同步定时器 SYNT 是专门用来完成以上操作的计时器。SYNT 上有 4 个通道,每个通道有一个 CMP,发生 CMP 比较事件时,可通过互联管理器 TRGM将此事件路由到 SYNCI 信号上,从而实现了多个 PWM 的同步/错相。
5
互联管理器 TRGM
互联管理器是将片上众多外设相互关联使用的桥梁。例如可以用 PWM 比较事件触发 ADC 采样,使用模拟比较器 ACMP 比较结果对 PWM 封波,使用IO 输入触发 GPTMR 同步计时等等。其功能非常强大,且易用。下面以一张图绘出 TRGM 的基本模型。
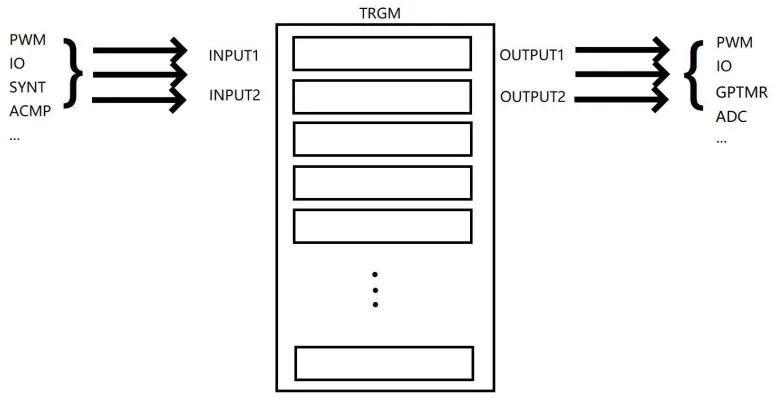
简而言之,TRGM 的每个 output 通道都可以在众多的 INPUT 中选一个。例如可以将 SYNT 的比较事件做为 INPUT,输出到 PWM 的 SYNCI,这样就实现了 PWM 同步;例如可以将 IO 作为 INPUT,输出到 IO,这样就实现了IO 电平的转移输出。
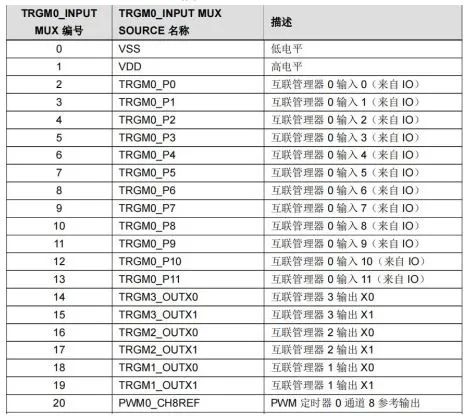
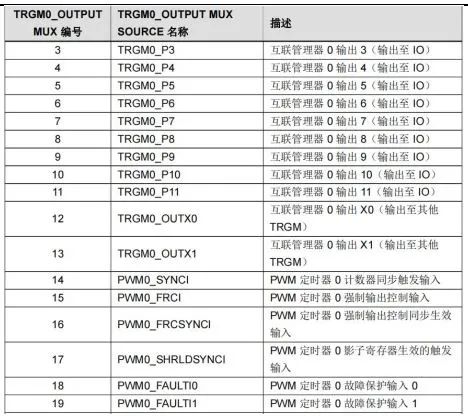
TRGM 可以实现外设硬件级别的同步与触发,可以实现各种外设互联配合使用,是极有用的一个功能模块。使用 TRGM 时,需要参考 UM 手册中TRGMx_INPUT_MUX 列表与 TRGMx_OUTPUT_MUX 列表,合理分配资源,选择需要的 INPUT 与 OUTPUT 信号。
PWM模块
普通PWM
由上述可知,一路普通PWM的输出需要配置好以下几点:
PWM 输出控制:是否互补对、死区插入等
RLD、STA
CMPx
影子寄存器
函数如下,逐一进行分析:
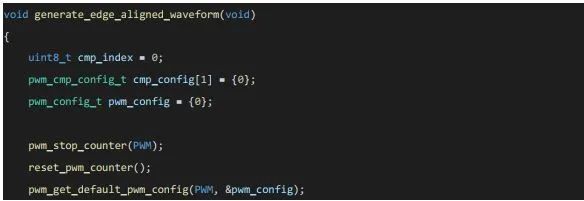
首先停止 PWM 计时器的计数器,将 PWM 计数器清零,获取 SDK 提供的 PWM 输出默认配置。程序没有特别之处,属于配置前的初始化工作。

配置 PWM 允许输出,死区为 0,输出不反相;

设置 RLD 与 STA,分别为 reload 和 0;
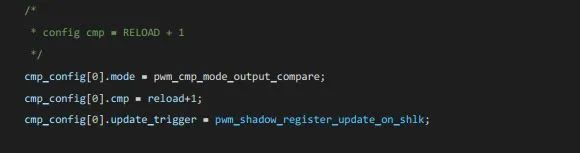
配置 CMPx,模式为输出比较模式,比较值为 reload+1,影子寄存器更新方式为写入 shlk 位更新;此时由于计数器计数无法达到 CMPx,故输出波形恒为低电平。
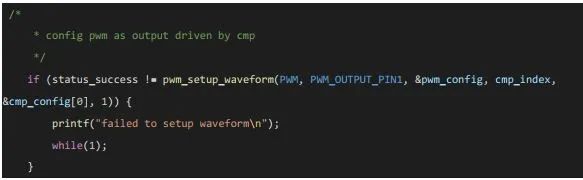
配置通道 0 使用 CMP0,比较器数量为 1 个,因此 CMP0 的大小决定了pwm 的占空比,占空比为(RLD-CMP0)/RLD

启动计数器,更新 CMP0 的影子寄存器为 reload/4,最后将影子寄存器的值提交到寄存器内生效。运行结果如下:
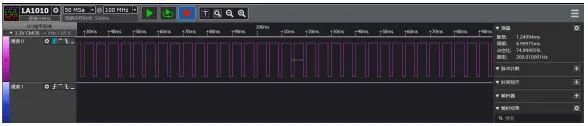
普通PWM
本篇内容到此结束,下一篇我们会介绍了如何生成互补 PWM、同步 PWM、错相 PWM,以及PWM如何使用ACMP封波。敬请期待哈~
-
PWM
+关注
关注
114文章
5206浏览量
215272 -
定时器
+关注
关注
23文章
3257浏览量
115625
发布评论请先 登录
相关推荐
开发者分享 | 适用于HPM的RustSBI实现

先楫半导体发布高性能HPM6E8Y系列MCU
精准驱动,尽在掌握 —— 探索伺服编码器的无限可能
高清视界,尽在掌握——深度解析变焦机芯模组技术

支持HPM6E00!HPMicro Pintool Web v0.3.1正式上线!

有奖提问!先楫半导体HPM6E00系列新品发布会!!
HPM USB系列:HPM6700双USB功能介绍
HPM USB系列:HPM6700双USB功能介绍

基于先楫HPM5300 RISC-V内核MCU的HPM5361EVK开发板测评效果(二)






 工商网监
工商网监
评论