 HR100位移传感器的设计
HR100位移传感器的设计
大家好,我是【广州工控传感★科技】02291333-000位移传感器事业部,张工。
HR100位移传感器是霍尔效应最重要的应用之一。 霍尔效应器件感应外加磁场的强度。 为了检测物体的位置,我们可以在物体上附上一个小的永磁体。 当物体相对于霍尔器件移动磁铁时,磁场强度会发生变化。 系统可以处理这些变化以检测物体的位置。
有几种不同的 HR200传感器磁铁配置可用于基于霍尔效应的位置传感应用。 对于每个传感器-磁铁配置,磁铁以不同的方式相对于传感器移动。 这会影响霍尔器件感应到的磁场并改变系统特性。我们将研究基于霍尔效应的位置传感中使用的一些基本磁性配置,并讨论它们的优缺点。

HR100
正面配置:最简单的磁性配置是图1所示的迎面感应。

在这种情况下,磁铁的南极直接移向或远离HR500传感器。 当磁铁非常靠近位移传感器时,大量的磁力线穿过传感器的传感面。 然而,当磁铁的南极远离传感器时,磁场强度迅速下降,如图1(b)所示,请注意,高斯与距离曲线有时被称为结构的磁通图。 正面结构的磁通密度与磁体与HR2000传感器之间距离的平方成反比。 图1(b)中给出的磁通量值可以由长约30毫米、直径约6毫米的磁铁产生。
应用:检测物体的存在
正面配置可与数字(开/关)霍尔效应传感器一起使用,以检测物体的存在。 假设 HR3000 位移传感器的磁性工作点和释放点如图 1(b) 所示。 磁性工作点指定了霍尔器件将开启的增强磁场水平。 磁释放点对应于霍尔器件关闭时减弱的磁场。

HR100
随着磁铁靠近HR4000位移传感器,磁场强度越来越大。 在大约 3.1 毫米的距离处,感应到的磁场等于磁工作点(在我们的例子中约为620高斯),此时传感器开启。 将磁铁靠近传感器会产生更大的磁场并保持传感器开启。 随着传感器远离磁体,磁场减小。但是,只要磁场不小于释放点(在我们的例子中约为 420 高斯),HR5000 位移传感器就会保持开启状态。 仅当磁场降至释放点以下时,设备才会关闭。 通过这种方式,我们可以检测到物体的存在。
正面感应的局限性
这种配置不太精确,尤其是在使 02560400-000 位移传感器接近的距离方面。 这是因为通量图的斜率(高斯与距离)在释放点附近较小。 磁释放点值的给定变化会导致02560396-000传感器关闭的距离值发生相对较大的变化。 磁操作点的相同变化导致距离变化更小。 这如图 2 所示。
假设如图2所示,对于假设的02560395-000传感器,工作点和释放点的单元间变化为 ΔB。 由于曲线在磁工作点处具有较大的斜率,因此 Δd1 远小于 Δd2。 因此,不同电路板之间的磁工作点对应的距离会更加一致。

另一个缺点是,由于磁场线的衰减非常快,正面传感不能用于检测大位移范围。 此外,在正面配置中,感应磁场与距离之间的关系是非线性的。 这使得在需要线性位置测量时检测长行程运动具有挑战性。 由于这些限制,在精度不那么重要的应用中,正面感应通常用作接近检测器。
单极滑移感应在这种布置中,磁铁的一个单极子从侧面移动,经过 HR050 位移传感器的感应面。 这如图 3(a) 所示。

当磁极通过 HR200 传感器时,它处于恒定的垂直距离(由图中的“气隙”表示)。 在中心位置(距离 = 0),感应磁场最大。 随着磁体远离传感器,磁场减小。 由于磁铁产生的磁场是对称的,所以磁通图是围绕原点对称的,如图3(b)所示。
如图 4 所示,磁通图的峰值随“气隙”值的变化而变化。

前滑还是侧滑配置?
值得注意的是,磁性配置的选择取决于被检测到的运动类型。 每个系统可能有一组不同的机械约束和能力。 例如,在正面配置中,物体无法通过HR2000MC传感器。 这种安排适用于被检测对象具有明确定义的端点位置并且我们有兴趣在该端点检测对象的存在/不存在的应用。
例如,正面感应可能是检测智能手机盖子是打开还是关闭的好选择。 滑动感应没有这个限制; 无论物体是否经过传感器,都可以使用它。
滑动配置的一个有趣特征是它的对称性。 由于这种结构的高斯与距离曲线是围绕原点对称的,所以操作点和释放点不取决于我们是面对传感器还是远离传感器。 这对于检测偏离中心线的情况很有用。
-
传感器
+关注
关注
2553文章
51511浏览量
757279 -
微位移传感器
+关注
关注
0文章
4浏览量
5581
发布评论请先 登录
相关推荐
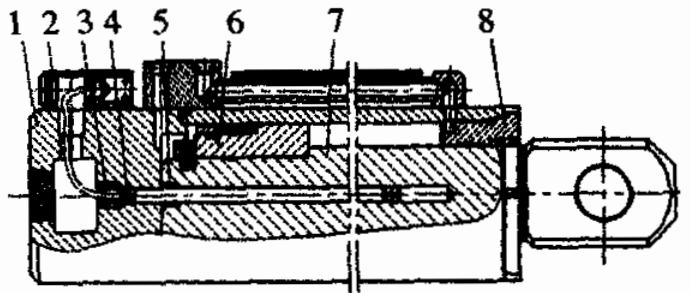
内置磁致伸缩位移传感器的推移油缸
高精度位移传感器选型指南 位移传感器在自动化中的应用
如何安装位移传感器的详细步骤
位移传感器与位移测量技术的关系
常见位移传感器故障及解决方法
如何校准位移传感器
位移传感器:原理、分类、应用与未来趋势
电涡流位移传感器的测量原理是什么

磁致伸缩位移传感器工作原理及结构






 工商网监
工商网监
评论