 RVIT-15角度传感器线性化
RVIT-15角度传感器线性化
大家好,我是【广州工控传感★科技】RVIT-15角度传感器事业部,张工。
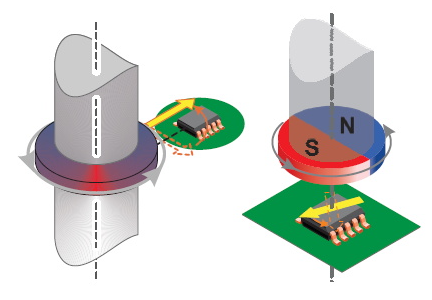
RVIT-15角度传感器用单轨直流电压供电,在120°角度感应范围内提供±3VDC (RVIT 15-60) 或4-20mA (RVIT15-120i) 输出。RVIT-15采用四个印刷电路线圈和一个轻质导电扰流板来实现超高性能和低转动惯量。传感器工作时,轻质扰流板会随着传感器轴旋转,从而改变印刷电路线圈的电感。产生的变化通过获得专利的自动处理电路加以精密测量。该信号随后被转换为与转轴角度成正比的线性直流电压输出。绝对输出旋转式位移传感器测量直角回转阀、烟道挡板、堰门、信件分类装置、输送机检查称重系统、松紧调节臂张紧器,以及分匝绕组轴运动等各种其他应用的位移。
从工业自动化和机器人技术到电子助力转向和电机位置检测,以监控同轴或离轴布置的旋转轴的角度。此应用的任何成功的角度测量系统设计都需要包括离轴或同轴放置、气隙、精度和温度范围等。特别是,最小化与温度相关的角度误差、未对准和气隙是最关键的目标之一。
这些变量又与系统级设计选择有关,例如磁体尺寸、磁体同轴或离轴排列、磁体材料和机械公差。因此RVIT-15-120i角度传感器足够灵活,不会在误差源处增加系统级设计的复杂性,磁角测量系统有两个主要的误差来源。与RVIT-15-120i角度传感器相关的误差本质上是非线性参数温度漂移和噪声。与磁场输入相关的误差是场强变化和场强非线性。
角度误差是磁铁的实际位置与RVIT-15-90i角度传感器测得的磁铁位置之间的偏差。该测量是通过读取角度传感器的输出并将其与高分辨率编码器进行比较来完成的。完整旋转的“聚合”角度误差定义为角度精度误差,并根据以下公式计算:角度精度误差=Emax–Emin/2
换句话说它在0°到360°的范围内偏离了理想的直线。在设计中使用磁体时,磁输入在整个旋转范围内可能并不均匀,并且存在固有误差。这些磁输入误差将导致系统中的测量误差,这在考虑具有高固有磁误差的侧向或离轴设计时尤其重要,如果磁场输入的误差占主导地位,即使是最精确校准的RVIT-15-60角度传感器也会产生不准确的结果。在大多数情况下,即使是同轴磁设计也存在相对较大的未对准问题。这个问题通常发生在生产线中用户模块的组装过程中。这些磁误差来源是不可避免的,减少这些误差通常是不可能的或非常昂贵。
分析RVIT-15角度传感器中的片载线性化功能:与RVIT-15-90i角度传感器相关的误差针对非线性和参数温度漂移进行了优化,而噪声性能可以针对使用片上滤波进行优化。

RVIT-15-120i通过使用线性化末端制造位置补偿这些误差来解决这个问题。 具体来说,它显示了如何通过线性化将与磁输入相关的±20°以上的误差降低到±0.3°,大约提高了65倍。这种线性化可以基于RVIT-15-120i角度传感器周围的目标磁体的单次旋转数据来完成。从该旋转读取的角度数据用于生成线性化系数,然后将其存储到片上,以最终优化该磁性系统的特定角度传感器。
RVIT-15-120i角度传感器分段线性化和谐波线性化。分段线性化是一种可编程功能,它允许调整角度传感器的传输特性,以便角度传感器可以输出施加磁场矢量角度的线性变化作为相应的线性角度增量。这种线性化是对从磁体围绕角度传感器旋转一圈收集的数据执行的。
两种技术的比较测试表明,虽然分段线性化技术可以实现更短的处理时间,但其校正正弦误差项的能力有限。谐波线性化技术在这方面可以做得更好。此外,谐波线性化方法的灵活性——尤其是改变所用校正谐波数量的能力——允许用户在计算时间和误差性能之间实现最佳平衡。测试表明,应用线性化技术后,±20°的角度误差可以降低到±0.3°以内。
-
传感器
+关注
关注
2551文章
51090浏览量
753478 -
角度传感器
+关注
关注
7文章
133浏览量
36180
发布评论请先 登录
相关推荐
线性传感器的灵敏度是什么是多少
多维科技高精度TMR3081角度传感器芯片的离轴应用案例
热电阻温度变送器线性化采用什么方法
TMAG3001低功耗3D线性和角度霍尔效应传感器数据表

方向角度传感器故障怎么解决
方向角度传感器坏了有什么影响
A1332角度传感器集成电路中先进的片上线性化





 工商网监
工商网监
评论