 科聪控制系统助力铸造行业向“智能”实现“质”的突破!
科聪控制系统助力铸造行业向“智能”实现“质”的突破!
此项目现场为传统铸造业,铸造是装备制造业发展不可或缺的重要环节,是众多主机和重大技术装备发展的重要支撑。该现场以往由人工遥控车辆来进行物资的挪动,现投运搭载科聪控制系统的AGV来代替人工用遥控车辆来移动物资。实现上位机上一键发送任务,AGV就能自动去执行一系列任务,完成自动化搬运物资。作为代替传统人工操作,本次AGV实施有着较大的意义,是传统铸造业往智能发展的重要一步。
科聪提供一体化整体解决方案
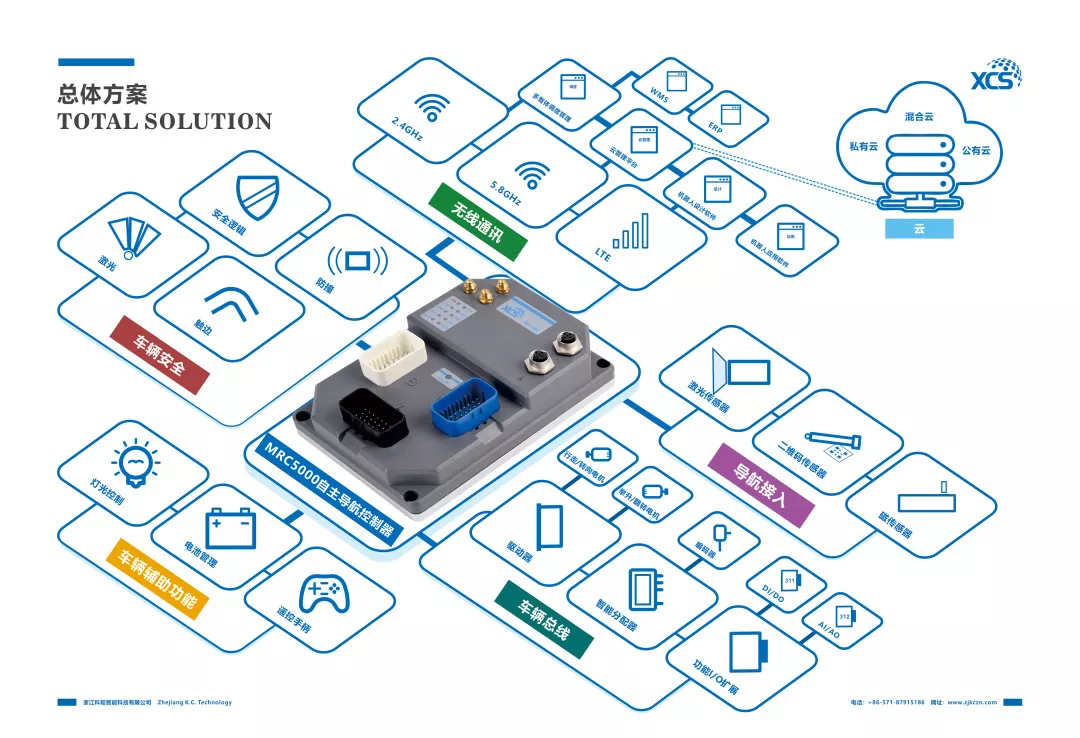
科聪在了解项目需求后,为项目提供“科聪MRC系列导航控制系统+机器人调度软件”软硬件为主的整体解决方案。科聪自主研发的MRC控制系统,对上层系统、下层系统紧密对接,针对现场不同的设计需求,进行了优化以及定制开发,满足其厂区现场恶劣作业环境和工况。
项目应用难点对策
01 车辆体积大
此现场应用的六舵轮搬运车承重要求高,车体体积较大,对导航精度要求极高。
对策:科聪高精度导航控制系统
科聪控制系统具有行业领先的导航定位性能,可实现最高+5mm导航精度和最高±0.5”角度控制。面对车体较大的移动机器人,科聪控制系统可以减小运行误差,助力项目落地。
02 现场制造环境地面油渍污染严重
由于铸造业的特殊工艺性,制造现场往往会出现地面油渍污染问题,车辆横移过程中会出现打滑问题。
对策:软件程序逻辑判断
科聪二次开发平台,可作程序逻辑判断分解横移时其各个方向轮子时正确的角度,检测是否正确,结合反光板绝对定位,避免出现打滑问题。
03 现场搬运道路相对较窄
现场搬运路径窄,且车辆较大,转弯时传统的直线以及曲线,小于车辆转弯所需的转弯半径,会出现车辆难转弯现象,进而对物资经行损害。
对策:窄巷道高精度控制功能
路径窄,对于车辆的导航精度及到点精度很高,通过应用科聪MRC系列导航控制系统,可达到导航±5mm精度,结合科聪应用软件窄巷道高精度控制功能,在参数上可以设置提前转弯,以及延后转弯来通过那些狭窄的通道,可高精度控制转弯时会出现的误差,避免出现转弯难问题。
此次投运实现对人力替代完成搬运货物的准确作业,并保障了生产和仓储作业的安全性、稳定性。此外,科聪自主研发的MRC控制系统,对上层系统、下层系统紧密对接,针对现场不同的设计需求,进行了优化以及定制开发,满足其厂区现场恶劣作业环境和工况。
在车辆本体厂商和科聪共同力量下,将移动机器人投用到铸造行业,极大加速了铸造行业向智能化发展的步伐。选择科聪控制系统,是各行各业迈向智能化的“快车道”。
-
AMR
+关注
关注
3文章
422浏览量
30176 -
移动机器人
+关注
关注
2文章
757浏览量
33534 -
AGV小车
+关注
关注
4文章
156浏览量
11081
发布评论请先 登录
相关推荐
家居空调智能控制系统应用
智能路灯远程控制系统
揭秘起重行业IO模块应用,助力智能高效作业!
AGV是什么? ——科聪智能自主导航控制系统
智能密集架控制系统有哪些
浅谈智能照明控制系统在综合管廊中的设计应用与研究
突破传统界限:讯维中央控制系统在多媒体领域的创新应用
浙江科聪完成A轮近亿元融资:持续领跑移动机器人控制系统市场

LED智能照明控制系统应用解决方案
科聪停车移动机器人整体解决方案!






 工商网监
工商网监
评论