 磁致伸缩位置传感器的五个核心部件
磁致伸缩位置传感器的五个核心部件
磁致伸缩传感器描述了铁磁材料放置在磁场中时变形的趋势,在这些材料中,分子偶极子和磁场边界(布洛赫壁)旋转以与施加的碳场对齐,这会导致材料内的变形。因此,在磁致伸缩材料中,电磁能转化为机械能。

识别和定位磁致伸缩位置传感器的五个核心部
各向同性铁磁材料,如铁、铜、镍、金或铝,在磁致伸缩方面最有效,因为它们允许其分子偶极子轻松旋转。
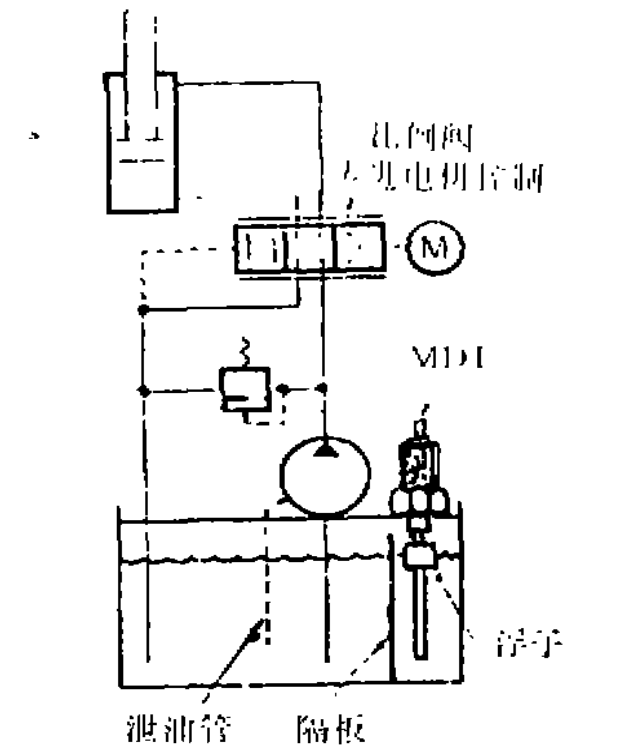
磁致伸缩线性位置(位移)传感器测量位置磁铁和传感模块之间的距离,零件不会磨损,因为定位磁铁不会在任何点接触感应杆,传感杆沿运动轴定向,定位磁铁连接在被测机器部件上,电子模块记录定位磁铁的位置。

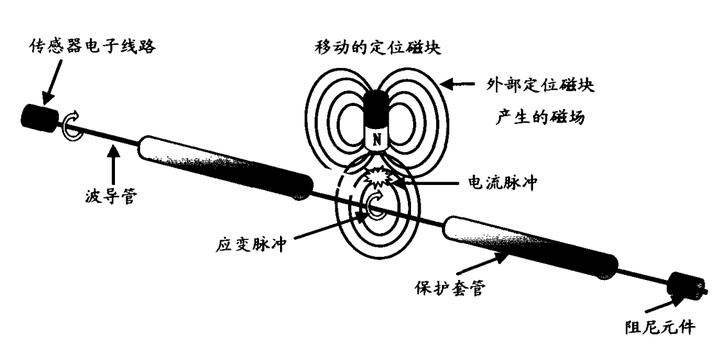
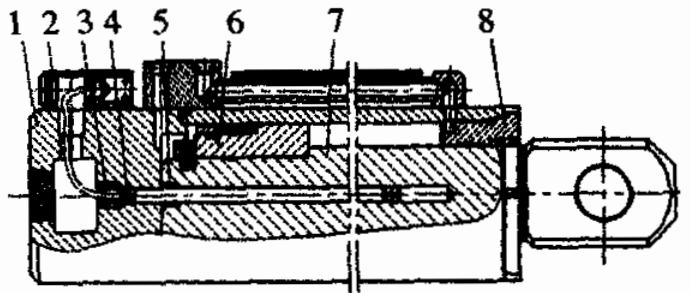
磁致伸缩位置传感器有五个核心部件组成:
1、定位磁铁:定位磁铁对波导施加磁场。
2. 波导:波导构成器件的核心,之所以叫它,是因为它在测量时会携带超声波,该波(应变波)是由磁体位置的磁场与电子模块在波导中感应的场(称为询问脉冲)之间的相互作用产生的。
3.电子模块:如前所述,电子模块在波导中启动询问脉冲。 发生这种情况时,计时器启动,一旦电子模块接收到返回脉冲,计时器就会停止,由于定位磁铁的时间延迟与其距离成正比,因此可以计算距离。
4、应变波换能器:应变波换能器从定位磁铁的位置接收应变波,应变波(返回脉冲)沿着波导以大约10倍的声速(大约 3000 m/s)向电子模块传播。
5.阻尼:由于另一个应变波也在波导中以与返回脉冲相反的方向传播,因此通过阻尼将其去除以防止干扰。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2553文章
51511浏览量
757256 -
位置传感器
+关注
关注
3文章
274浏览量
27603
发布评论请先 登录
相关推荐
EtherCAT在磁致伸缩位移传感器中的应用
EtherCAT是实时工业网络协议,应用于磁致伸缩位移传感器,实现低延迟、高带宽数据传输,多设备集成与精确同步控制,广泛用于自动化、机器人控制等领域。
GB-Series Analog磁致伸缩位移传感器
博尔森GB型磁致伸缩位移传感器提供模拟量的电流和电压输出、正向和反向测量功能。模拟输出信号是与磁铁的位置成比的。测量范围是工厂设定的,不需要

内置磁致伸缩位移传感器的推移油缸
内置磁致伸缩位移传感器提高煤矿支架移架精度,通过非接触测量避免摩擦磨损,确保恶劣工况下正常工作,为精确控制支架移动距离提供技术支持。

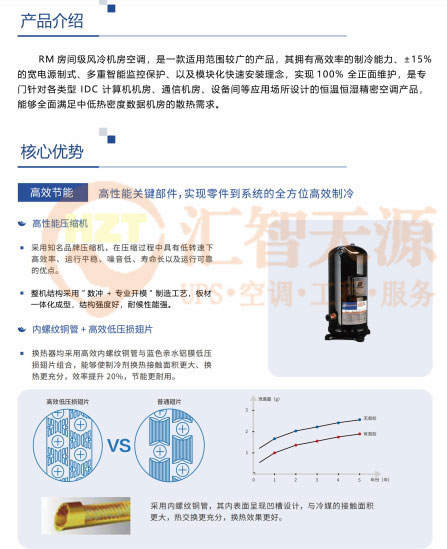
精密空调核心部件有哪些?工作原理是什么?
机房精密空调是专门为计算机房、数据中心等场所设计的空调设备,其核心部件包括压缩机、冷凝器、蒸发器和膨胀阀等。下面将详细介绍这些核心部件的工作原理。


电机控制器的核心部件是什么
电机控制器的核心部件是其内部的电子控制系统,它负责驱动和控制电机的运行。本文将详细介绍电机控制器的核心部件,包括其功能、原理和应用。 一、电机控制器





 工商网监
工商网监
评论