 【产品应用】MX2000上如何拓展CAN接口?
【产品应用】MX2000上如何拓展CAN接口?
MX2000平台接口虽然丰富,但其本身不具备CAN接口。如果在实际产品应用中,需要使用到CAN接口的时候那该怎么办呢?本文将以新产品MX2000核心板为例讲述如何解决该问题。 概述
概述 软硬件准备
硬件设计和连接使用SPI转CAN功能时,需要将CSM300(A)的MODE引脚接至高电平(3.3V)。MCU的SPI接口与CSM300(A)的SPI接口连接,同时MCU需要提供GPIO与RST、INT、CTL0、CTL1引脚连接,实现对CSM300(A)的有效监测与控制。若需要通过MCU对CSM300(A)进行配置,则需要额外的GPIO与CFG引脚连接。图1是CSM300A的参考电路。不使用的模块引脚只需悬空而不用连接,以免因电路连接不当从而造成模块损坏。
软硬件准备
硬件设计和连接使用SPI转CAN功能时,需要将CSM300(A)的MODE引脚接至高电平(3.3V)。MCU的SPI接口与CSM300(A)的SPI接口连接,同时MCU需要提供GPIO与RST、INT、CTL0、CTL1引脚连接,实现对CSM300(A)的有效监测与控制。若需要通过MCU对CSM300(A)进行配置,则需要额外的GPIO与CFG引脚连接。图1是CSM300A的参考电路。不使用的模块引脚只需悬空而不用连接,以免因电路连接不当从而造成模块损坏。
软件改动1. 修改设备树在设备树中增加如下节点:
概述MX2000平台上不具备CAN接口,但可通过我司CSM300(A)系列SPI(UART)转CAN模块进行拓展CAN接口。在实际产品应用场景中如果需要使用CAN接口,则可以参考本文进行拓展、测试、评估。
软硬件准备
硬件设计和连接使用SPI转CAN功能时,需要将CSM300(A)的MODE引脚接至高电平(3.3V)。MCU的SPI接口与CSM300(A)的SPI接口连接,同时MCU需要提供GPIO与RST、INT、CTL0、CTL1引脚连接,实现对CSM300(A)的有效监测与控制。若需要通过MCU对CSM300(A)进行配置,则需要额外的GPIO与CFG引脚连接。图1是CSM300A的参考电路。不使用的模块引脚只需悬空而不用连接,以免因电路连接不当从而造成模块损坏。
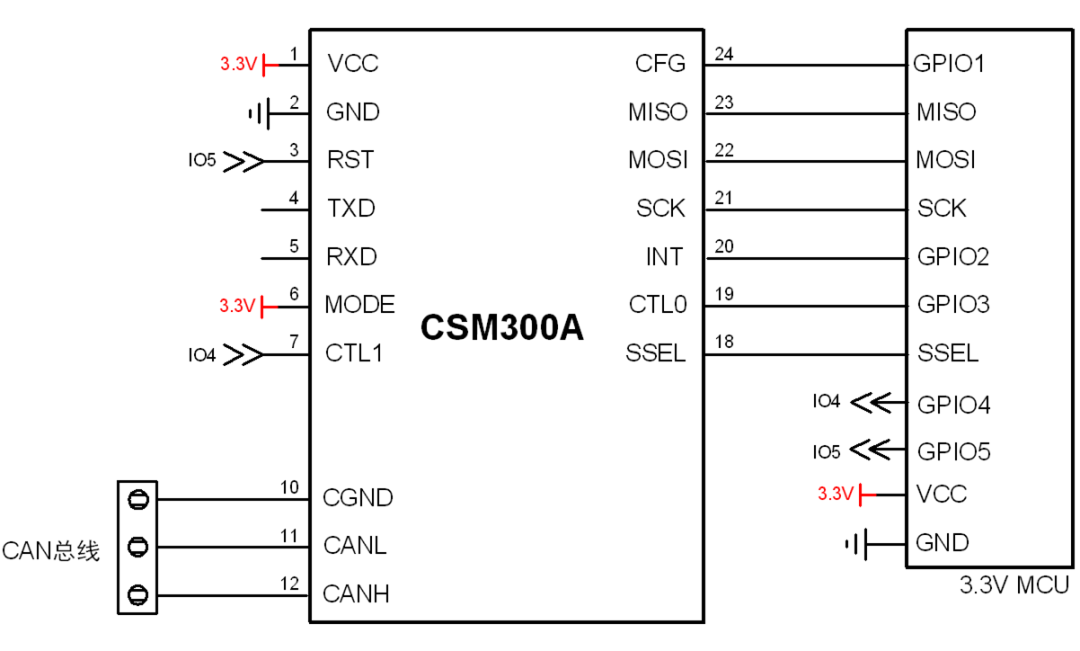
| CSM-Eval引脚 | MX2000-EV-Board端引脚 | CSM-Eval引脚 | MX2000-EV-Board端引脚 |
| SSEL | SSI1_CE0 | CFG | PB27 |
| SCK | SSI1_SCK | INT | PC20 |
| MISO | SSI1_DI | CTL0 | PB24 |
| MOSI | SSI1_DO | CTL1 | PB25 |
| GND | GND | RST | PB26 |
| VCC | 3.3V |
软件改动1. 修改设备树在设备树中增加如下节点:&spi1 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&spi1_pe_normal>, <&spi1_pe_cs>;
spi-max-frequency = <2000000>;
num-cs = <1>;
cs-gpios = <0>;
ingenic,chnl = <0>;
ingenic,allow_cs_same = <1>;
ingenic,bus_num = <0>;
ingenic,has_dma_support = <0>;
ingenic,spi-src-clk = <1>;/*0.ext; 1.ssi*/
/delete-node/ spidev@0; // 删除原有spidev节点
csm300@0 {
compatible = "zhiyuan,csm300";
status = "okay";
spi-max-frequency = <1000000>;
reg = <0>;
gpios = <&gpb 24 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL0引脚 */
&gpb 25 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL1引脚 */
&gpb 26 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* RST引脚 */
&gpb 27 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CFG引脚 */
>;
interrupt-parent = <&gpc>;
interrupts = <20 IRQ_TYPE_LEVEL_LOW>;
};
};2. 增加驱动并修改内核配置
驱动文件请联系FAE或者销售工程师。将驱动文件csm300.c,放置于kernel/drivers/net/can/spi/文件夹下。并在该目录的Makefile文件中加入以下内容:obj-$(CONFIG_CAN_CSM3XX) += csm300.o/*添加至文件末尾*/同时在该目录下的Kconfig文件中加入以下内容:
config CAN_CSM3XX
tristate "CSM3XX SPI CAN controllers"
help
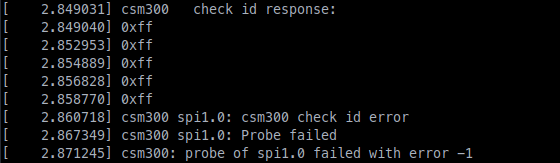
Driver for CSM3XX SPI CAN controllers.成功加载并且硬件连接无误的情况下,会出现如下log打印。
[]
[] csm300 check id response:
[] csm300 spi0.0: csm300 check id succeed
[] csm300 spi0.0 can0: csm300 successfully initialized.
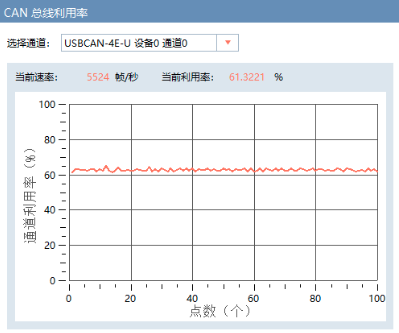
性能测试
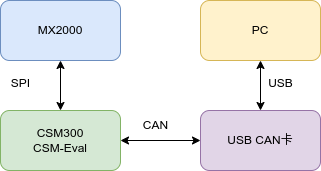
将CSM-Eval评估套件通过USB CAN卡USBCAN-4E-U和电脑连接,框图如图3所示。
[]
[]
[] set bitrate is 1000000
[]
[] csm300 check id response:
[] 0xf7
[] 0xf8
[] 0x2
[] 0x13
[] 0x1e
[] csm300 setup response:
[] 0xf7
[] 0xf8
[] 0x1
[] 0x13
[] 0x1d
[] csm300 setup succeed
[]MX2000端推荐使用以下命令进行测试。其中-g 后面所带参数代表间隔时间(单位:s),经过测试会直接影响丢包率,最优为0.1。
[]
技术交流群
长按识别如下二维码可加入“工控板/核心板技术交流群”,与志同道合的朋友交流,并有专业技术人员为您答疑解惑,如有问题可以咨询小致微信:zlgmcu-888。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
致远电子
+关注
关注
13文章
410浏览量
31589
原文标题:【产品应用】MX2000上如何拓展CAN接口?
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
DLP2000EVM和DLP2010EVM是否可以从光机模块上取下来装到电路板上对应的接口上使用?
DLP2000EVM和DLP2010EVM这两款上面的DMD是否可以从光机模块上取下来装到电路板上对应的接口上使用。如果不可以,又没有对应的开发板可以实现这个功能,有的话可以推荐型号
发表于 02-27 07:04
CAN总线十万个为什么 | 如何轻松应对CAN(FD)接口不足?
导读项目扩张时,CAN(FD)接口不足常常成为硬件工程师的痛点。本期将为您介绍一种高效解决方案,帮助您从根本上解决接口瓶颈问题,同时提升项目效率和系统可靠性。很多硬件工程师在项目扩张的时候,都需要

千兆以太网解决方案:MX2000核心板,高性能不高价
导读在嵌入式开发中,千兆以太网的需求日益增长,特别是在工业自动化、视频监控和云计算等场景。MX2000核心板以其高性能和经济性,为您提供了满足高速数据传输和成本效益双重需求的理想解决方案。在

CAN总线的接口类型
CAN总线(Controller Area Network)是一种基于广播的串行通信协议,广泛用于连接分布式系统中的各个设备,实现它们之间的数据交换和控制。CAN总线接口的定义涵盖了物理层和数据链路层的多个方面,包括
芯力特车规TVS产品助力CAN/LIN通讯接口保护
芯力特深耕车规CAN/LIN通讯接口芯片,在大量的客户项目应用中深入了解客户需求后,推出了汽车级TVS防护器件,助力车规CAN/LIN通讯接口保护。该系列

如何使用CAN盒测出目标CAN设备的波特率
要使用CAN盒测出目标CAN设备的波特率,可以按照以下步骤进行: (1)硬件准备: 准备一个与目标CAN设备兼容的CAN盒。 确保CAN盒的
如何将PSoC CAN控制器与NMEA 2000网络结合使用?
NMEA 2000 是一种用于航海应用的网络,采用 ISO 11898-2(CAN)标准。 11898-2 (CAN) 的加入反映了 CAN 总线作为 NMEA
发表于 05-23 07:04
全新Linux环境PCAN驱动程序发布!CAN/CAN FD通信体验全面升级!
全新8.17.0版本的PCAN-Linux驱动程序正式发布,专为CAN和CAN FD接口量身打造。无论是CAN 2.0 a/b还是CAN F






 工商网监
工商网监
评论