 VASS标准 : FB 565 FB_TYP_RS车型转换中间存储数量
VASS标准 : FB 565 FB_TYP_RS车型转换中间存储数量
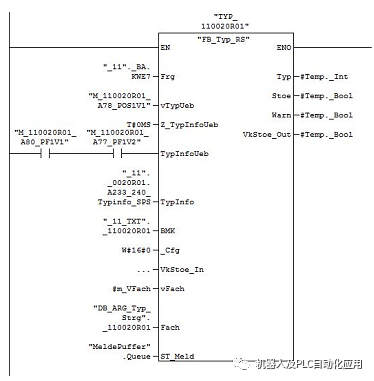
块 "FB_TYP_RS" 用于记录来自工厂搬运机器人站的型号信息且属于块计数功能的组成部分。
对于每个搬运机器人和每个站,都为其集成一个块。该块将站/机器人的型号信息发送至型号管理的数据邮箱,防止向站、机器人等交接零件时零件被计数两次。这种情况下,站/机器人会耦联到上游的站/机器人。
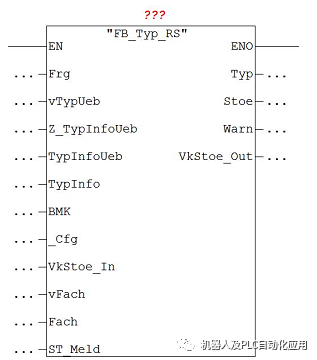
Frg BOOL 使能手动输入
vTypUeb BOOL 在型号管理中传输或删除的上游型号
Z_TypInfoUeb TIME 来自零件控制的型号信息覆盖掉零件计数器中的型号信息以前的时间(用于人工干预,或者处理外部对型号管理带来的影响)
TypinfoUeb BOOL 应用型号信息
Type info BYTE 型号信息
BMK BOOL 名称
_Cfg WORD 组态字 X0:无消息:X1:0= 基于位 1= 基于型号信息值;
X2:在该设定时间后,来自零件控制的型号信息覆盖零件计数器中的型号信息
VkStoe_In BOOL 连接故障
Type BOOL 来自型号管理的当前型号
Stoe BOOL 故障
Warn BOOL 警告
VkStoe_Out BOOL 连接故障
vFach INT 上游站的型号(零件型号从上游站/机器人获得,且在传输后立即清除)
Fach INT 站/机器人的型号(该单元含站/机器人的零件的型号信息,这些信息由 vFach 传输或者从带无配置站/机器人的零件控制功能获得)
ST_Meld 消息缓冲区 信息结构、用于消息 ID 时间戳和状态的全局数据结构。
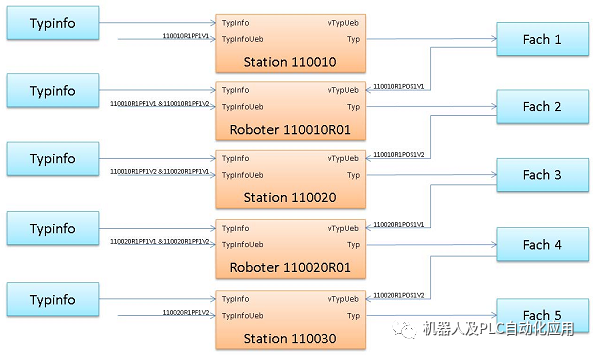
该块可采用两种方式获得用于计数且保存在“Fach”下的型号信息。
第一种方法是通过数据块的存储位置或上游零件计数器“写”型号信息。仅第一个零件计数器需要通过零件识别功能读型号信息。所有后续零件计数器都是写型号信息。零件控制被忽略不用。对于从一个零件计数器至下一个零件计数器的这种“写”功能,只需利用输入"vTypUeb" 和 "vFach"。该功能可以正确地处理 90% 的零件数量。"vTypUeb"上出现边沿信号时(最好采用 POSxVx),"vFach" 的型号信息被复制至 "Fach",接下来,删除 "vFach" 中的型号信息。
该块的另一个功能也可以可靠地计数到 90%;并可以处理例如从站中人工地移除舱室、PLC 故障、删除数据块等状况。机器人的零件控制/型号信息用于处理上述这些情况。输入 "Typinfo" 和 "TypInfoUeb" 的连接即用于该目的。站的零件检查或机器人的型号信息,被连接至输入(型号信息)(Type info)。机器人的无配置信号 (PFxVx) 则连接到输入 "TypInfoUeb"。"Typ
Info" 上被施加一个 1 信号,该 1 信号被作用到 "TypInfoUeb" 上;只要该 1 信号还在,将信号也会写入到 "Fach" 中。
这两种功能,即“写”功能 和通过零件检查实现的型号识别功能,都可达到 90% 的覆盖率。
交叉使用这两种功能,可以覆盖 100% 的零件数。
由于这两个功能可以正确地计数(除错误情况外),因此,可以单独地测试这两个功能(调试时建议如此做)。
零件计数器必须编程在用于型号管理的 FC 中。
如果没有 Cfg.X0,则将上游站/机器人的已传递型号信息与站/机器人的实际型号信息相比较。
采用 Cfg.X1,可以在基于值的型号输入和基于位的型号输入之间进行切换。
Cfg.X2 将无配置型号传输过程推迟某个已组态时间 "Z_TypInfoUeb"。
示例:
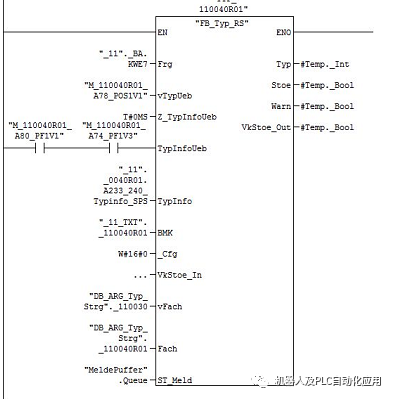
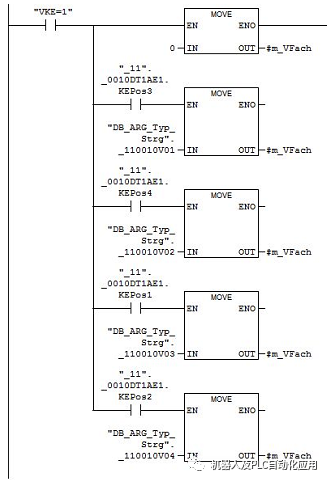
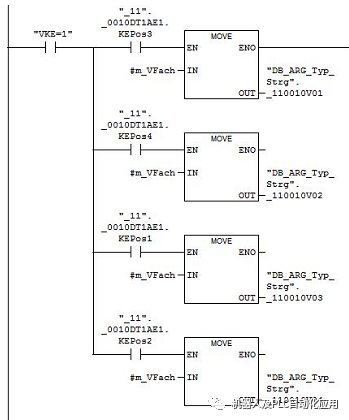
转盘接线示例中有三个设备和一个机器人;机器人从三个设置中的某一个设备取零件。必须注意:背景数据块中 "vFach" 的变化取决于转盘的舱室移除操作,但始终会写同一个 "Fach"。
为了对零件正确地计数,必须基于舱室位置,将机器人计数器块上 "vFach" 的内容移至辅助标志 "m_VFach" 上。接着,再将该辅助标志连接至计数器块。执行完计数器块后,该辅助标志必须复制回该输出变量。
-
机器人
+关注
关注
211文章
28419浏览量
207110 -
计数器
+关注
关注
32文章
2256浏览量
94575
原文标题:VASS标准 : FB 565 FB_TYP_RS 车型转换中间存储数量
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何优化DC/DC变换器中FB分压电阻的FB布线
FB2031 pdf datasheet
FB2000 pdf datasheet
FB412- 在VASS 标准中对大气缸的控制解析
PLC控制中FB和FC块的不同之处

西门子FC与FB究竟有啥区别?
VASS滚床输送控制FB453

监控机器人运动的过程条件FB ONL/FB PSPS


西门子博途:SCL中FB模块的结构






 工商网监
工商网监
评论