 焊接变位机的主要组成结构及运动特点
焊接变位机的主要组成结构及运动特点
无锡金红鹰工业自动化有限公司是一家设计生产工业机器人及提供机器人工业自动化系统解决方案的高新技术企业。如果您对焊接机器人感兴趣,可以联系无锡金红鹰,我们是专业的工业机器人集成商,提供机器人系统设计、生产、销售及售后一站式服务。
焊接变位机主要的组成原理有:控制的装置、操作的装置、工艺的保障装置和动力源的装置四大类。
一、控制的装置:主要的组成是电气的控制系统,可以对变位机在整个工作的状态进行控制;
二、操作的装置:包含的有垂直的导向机构、导轨、焊枪、焊枪夹和倾角的调节机构等,其中倾角的调节机构可以保障焊枪绕中心进行正负的旋转焊接。
三、工艺包装的装置:组成有导丝嘴、导丝的机构和焊丝的导管,能够实现焊丝自动的导向和定位,保证整个焊缝的质量。
四、动力源的装置:在组成上主要是气缸,采用的是气压的驱动来对动力进行传送。

无锡金红鹰单轴水平回转变位机
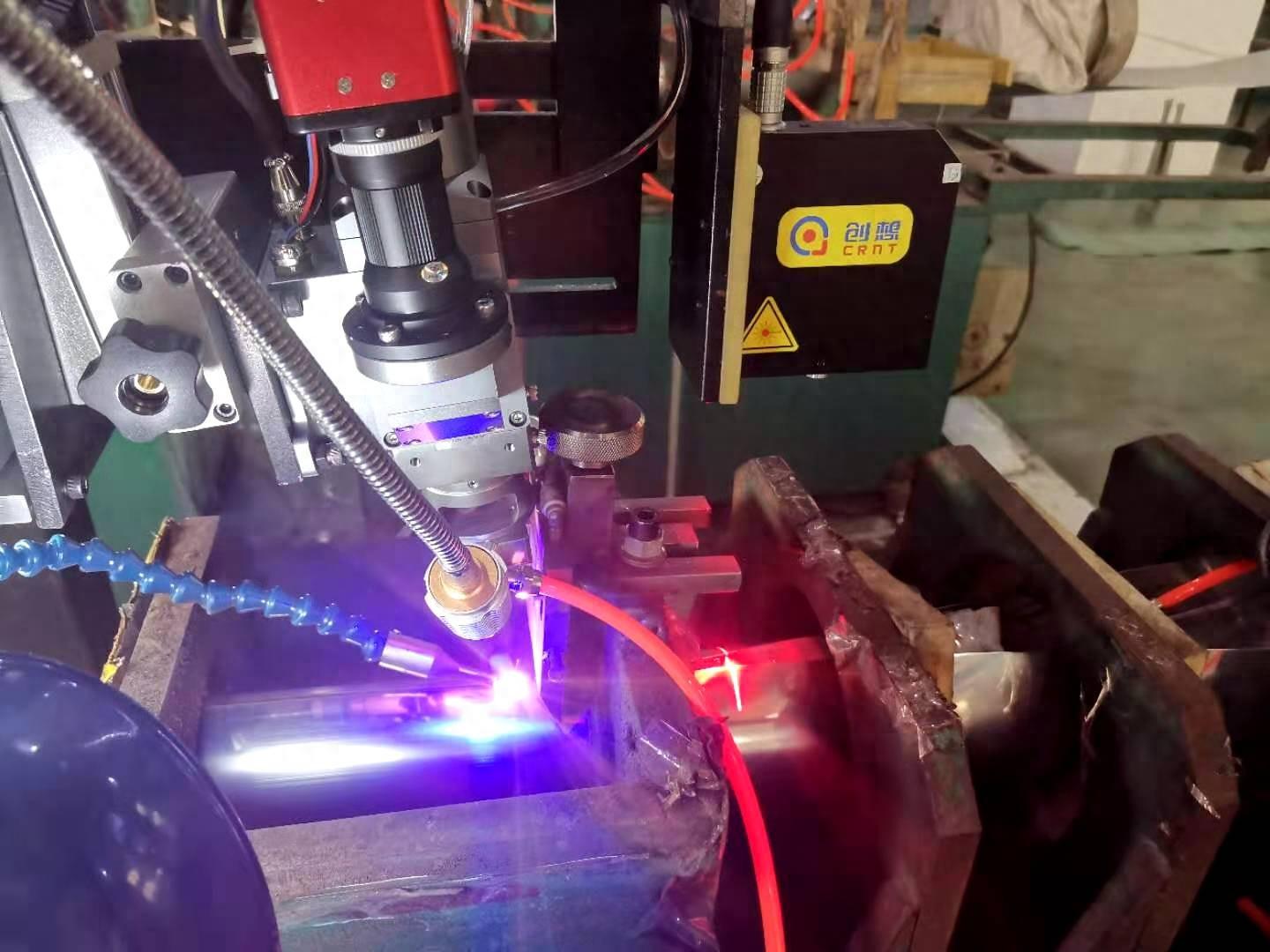
焊接变位机是一种安装用于将焊头或焊枪发送并坚持在待焊接的位置,或者以选定的焊接速度沿指定轨迹挪动焊剂,应遵守以下原则:
标准计划优化原则当计划需要一些工作空间请求时,经过标准优化选择小臂标准,利于加强变位机的刚度,进一步减小运动惯性。高强度数据的选择规范。由于设备的从伎俩、手臂、手臂到框架依次充任负载,所以高强度数据的选择规范应该是降低零件的质量。

无锡金红鹰双轴U型变位机
较小的运动惯量原则由于焊接变位机,中有许多运动部件,运动状态经常发作变化,冲击和振动将不可防止地发作。选择较小的运动惯量原则能够加强设备的运动稳定性,改进其动态特性。
因而,在符合强度和刚度的前提下,应留意尽可能减小运动部件的质量,并留意运动部件对转轴质心的设备。在焊接变位机计划中,刚度比强度重要。为了使刚度大,需要合理选择杆件的截面外形和规格,行程支撑刚度和接触刚度,合理布置作用在臂上的力和力矩,尽量减小杆件的弯曲变形。
审核编辑黄宇
-
机器人
+关注
关注
211文章
28524浏览量
207563 -
焊接
+关注
关注
38文章
3183浏览量
59903
发布评论请先 登录
相关推荐
直流无刷电机的主要特点是什么?直流无刷电机具体可以组成哪些结构?

bnc母头免焊接的典型结构特点

简述毫米波雷达的结构、原理和特点
深度剖析:MT6816 磁编码 IC 在机器人焊接变位机中的应用
激光焊接技术在焊接医疗介入导丝的特点有哪些

激光焊接技术在焊接医疗耳内窥镜的工艺特点

手持激光焊接机特点

运动控制系统由什么组成
激光焊接机在焊接内窥镜的技术特点

关于直线电机的运动形式、结构以及力的计算

焊接质量缺陷产生的主要原因

激光焊接技术在焊接鼻胆引流导管的应用特点






 工商网监
工商网监
评论