 一文了解bootloader
一文了解bootloader
Bootloader 介绍
大多数Bootloader 包含两种操作模式。
启动加载模式
下载模式
对于大多数汽车软件开发者来说,从客户需求的角度,他们更多关心Bootloader的下载模式。下面我们将从CAN Bootloader的一般需求入手,来介绍一下CAN Bootloader 的整个实现过程。
CAN Bootloader 简述
通过CAN网络升级一般需要考虑下面几个方向。
01
针对单一节点
CAN网络是串行结构,在对节点升级的时候,不能被别的节点影响,也不能影响到别的节点。这里就需要进行点对点升级。在OEM 的规范中会对每一个ECU 都有自己的诊断ID。一般情况下针对CAN网络的ECU有。
两个接收ID
功能寻址ID
物理寻址ID
一个发送ID
诊断发送ID
这样可以确保点对点的操作,和其他节点互相不干扰。
02
节点的智能设计
在CAN网络中实现数据更新,最进本的就是master ECU 把数据有效的传输给Slave ECU, 这样Slave ECU 对自身的flash 进行操作。在这个过程中需要对数据进行一定要求。
保证数据传递的有效性-->传输过程没有错误
保证数据本身的真实性--> 未被篡改
保证数据发送方的可靠性-->被授权的ECU
保证数据本身的正确性--> 是否与Bootloader 兼容
等等需求
这里对传输过程的保证,汽车OEM 一般通过UDS 让Master ECU 和 Slave 进行交互。通过握手协议,以及一些routine 来对上面需求进行一一实现。
针对UDS 这里不一一介绍,可以翻阅14229 自行查询。
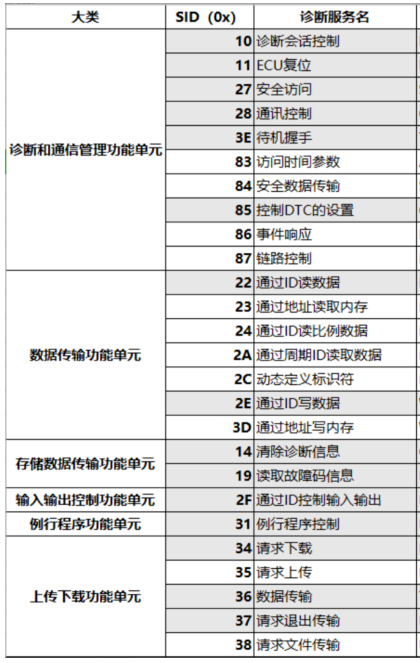
注意这里缺少新版的 0x29 服务。
UDS诊断29认证服务-Authentication Service
03
进入Bootloader 模式
一般来说这里有一下几种方式
APP 主动跳转至 Bootloader 模式
上电启动由于Bootloader 检测APP 失效,主动停留在Bootloader
APP 软件异常,自动复位到Bootloader 模式下。
这里针对OEM 的升级需求,一般是 第一种, APP 主动跳转至Bootloader 模式。因为Bootloader 不一定都是需要依赖UDS的,这里统一叫Bootloader 模式,OEM 的 UDS 的规范里面的名称叫做programming session。
一般来说OEM 会在APP 里面先进行session 跳转,身份验证。
最后通过 10 02 命令让APP 跳转到Bootloader 模式下。
在我们进行bootloader设计的时候,可以通过任何特定方式,注意这里的特定方式不能是随随便便就可以触发 的,防止误触进入bootloader 模式。
因为跳转的逻辑是 APP 检测到一定的条件,然后 对某些寄存器,或者某些Bootloader 可读的内存空间进行写flag. 随后进行reset. 这样在reset完成之后, bootloader 会检测到,这次不需要跳转至APP 了。
04
对bootloader的要求
从实际的研发需求出发,这里列出了一些常用的需求。实际OEM 的bootloader 可能会细化需求,但是最终都是为了下面的目的提出来的需求。
多次数据更新
刷写速度,传输速度
差分更新
身份验证
数据格式的标准化
对数据的完整性,有效性等进行校验
对APP 的有效性进行校验
上位机方便友好
OEM 对Bootloader 的基本要求
在OEM 的需求里,在刷写过程一般分为三个步骤。
前处理
刷写
后处理
分别是做什么的呢?
前处理
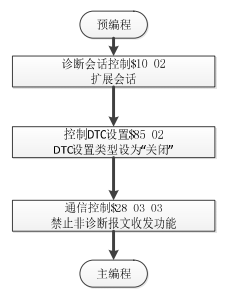
需求各不相同,但是目的基本都一致。
避免其他节点对升级过程的影响
避免自身节点对升级过程的影响
避免自身节点对其他节点的影响
刷写
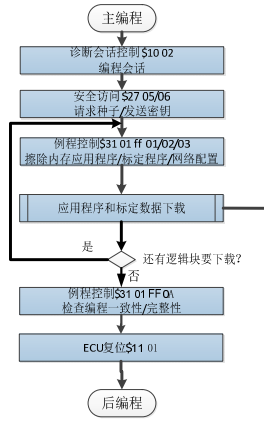
通过一系列的UDS 命令进行 点对点 交互。其目的和前面提到的一致。
发送数据的ECU 可靠
数据传输过程可靠
数据有效性(识别有没有被篡改)
数据加密解密数据安全
等等
后处理
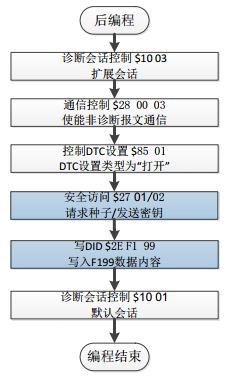
解除自身的特殊状态。更新配置参数等等。
这里面 ECU 需要做好和APP 的相互校验。需要达到
APP 是否有效,Bootloader 需要能判断出
APP 运行时无效,需要能有效进入Bootloader模式。
APP 无效, Bootloader 不应该跳入
等等
Bootloader的设计与实现
总结一句话
最基本的Bootloader通过传输协议把数据可靠的写入指定的内存空间
通过上面的分析,总结一下我们需要实现哪些功能。
01
控制器最小系统
单纯运行Bootloader的软件,这里是不需要os的。只需要一个while(1) + 中断系统顺序执行即可。
本文以Aurix Tricore芯片示例代码介绍。
启动代码
static void __StartUpSoftware(void); static void __StartUpSoftware_Phase2(void); static void __StartUpSoftware_Phase3ApplicationResetPath(void); static void __StartUpSoftware_Phase3PowerOnResetPath(void); static void __StartUpSoftware_Phase4(void); static void __StartUpSoftware_Phase5(void); static void __StartUpSoftware_Phase6(void); static void __Core0_start(void);
main 函数
这里面实现很简单,只需要判断是否进入app. 如果不进入app. 就只需要监听通讯接口的数据,进行相对应的操作即可。
int main(void)
{
if(*((uint32_t *)APP_EXE_FLAG_START_ADDR)==0x80001000){
CAN_BOOT_JumpToApplication(APP_START_ADDR);
}
__set_PRIMASK(0);//开启总中断
CAN_Configuration(1000000);
while (1)
{
if(CAN1_CanRxMsgFlag){
CAN_BOOT_ExecutiveCommand(&CAN1_RxMessage);
CAN1_CanRxMsgFlag = 0;
}
}
}
02
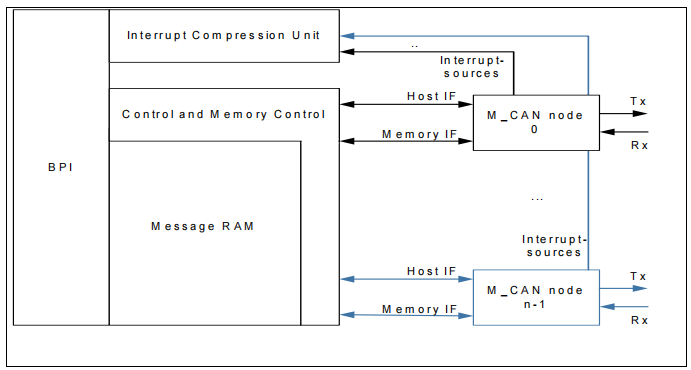
通讯驱动
这里面采用的是比较简单的CAN 通讯。
一般来说因为上位机在传输数据的时候,速度是很快的。我们bootloader里面的CAN 接收需要采用中断的模式进行收发。
对于CAN 的参数配置。
波特率
typedef struct {
unsigned char SJW;
unsigned char BS1;
unsigned char BS2;
unsigned short PreScale;
} tCAN_BaudRate;
可以根据芯片手册的原理进行配置。
这里面对于Bootloader来说,比较重要的就是波特率和收发报文ID 以及中断模式。
因为这些是需要和上位机进行配合的。
这里给出以下Mcal 代码初始化CAN时候的形参。可以大概看出需要初始化的内容
/******************************************************************************* ** Traceability : [cover parentID={196A1432-EAB1-461a-BD6C-259784BF6397}] ** ** ** ** Syntax : void Can_17_McmCan_Init ** ** ( ** ** const Can_17_McmCan_ConfigType* const Config ** ** ) ** ** ** ** Description : Driver Module Initialization function ** ** * This function initializes: ** ** * Static variables, including flags ** ** * CAN HW Unit global hardware settings ** ** * Controller specific settings for each CAN Controller ** ** All CAN Controllers will be in state CANIF_CS_STOPPED after initialization** ** [/cover] ** ** ** ** Service ID : 0x00 ** ** ** ** Sync/Async : Synchronous ** ** ** ** Reentrancy : Non-Reentrant ** ** ** ** Parameters(in) : Config - Pointer to all cores CAN driver configuration ** ** ** ** Parameters (out) : none ** ** ** ** Return value : none ** ** ** *******************************************************************************/
对于bootloader来说,这里只需要三个接口
初始化,收,发
void CAN_Configuration_init(uint32_t BaudRate); uint8_t CAN_WriteData(CanTxMsg *TxMessage); uint16_t Read_CAN_Address(void);
03
内存驱动
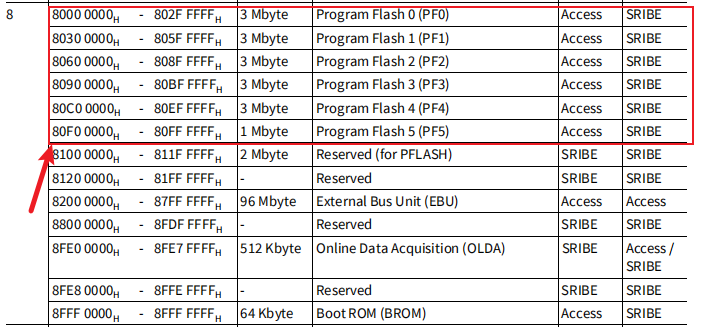
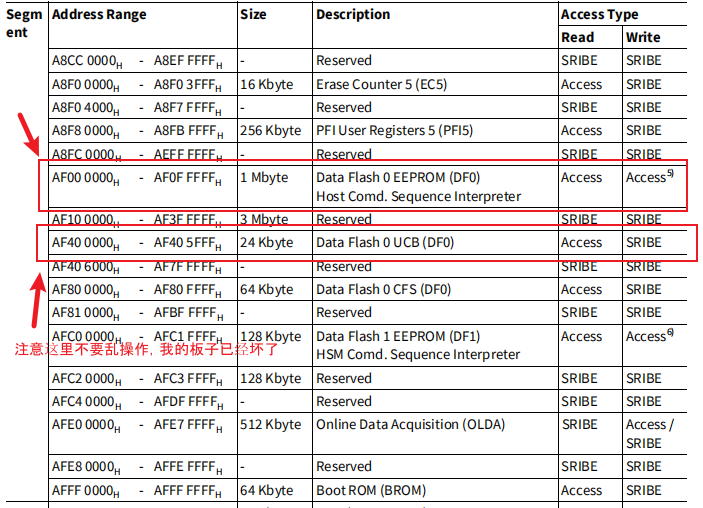
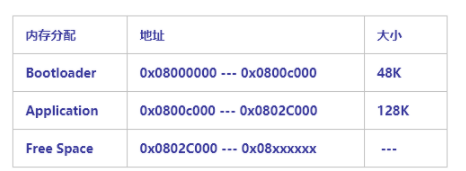
首先看一下内存分配
PFLASH
DFLASH
一般来说 被刷的软件格式是Hex 或S19. 针对这两种格式就不说了。
code 和 data 可以根据主机厂需求分为两个或多个Hex.
所以这里需要对Pflash 和 DFlash 都进行操作。
需要注意的是两个不同的flash 操作的 扇区大小是不一样的。Mcal提供的接口已经做了相对应的处理。
对于bootloader来说,需要的接口 擦除 和 写入。
/******************************************************************************* ** Syntax : FlsLoader_ReturnType FlsLoader_Write( ** ** const FlsLoader_AddressType TargetAddress, ** ** const FlsLoader_LengthType Length, ** ** const uint8* const SourceAddressPtr) ** ** ** ** Service ID : 0x31 ** ** ** ** Sync/Async : Synchronous ** ** ** ** Reentrancy : Non Reentrant ** ** ** ** Parameters(in) : Length: Number of bytes to be written. It should be ** ** multiple of the following page sizes of the ** ** selected Flash for write. ** ** PFlash: 32 Bytes ** ** DFlash: 8 Bytes ** ** SourceAddressPtr: Pointer to source data buffer ** ** TargetAddress: Target address in Flash memory. ** ** It should be aligned to the following page sizes ** ** of the selected Flash for write. ** ** PFlash: 32 Bytes ** ** DFlash: 8 Bytes ** ** ** ** Parameters (out) : None ** ** ** ** Return value : FLSLOADER_E_OK: Successful execution. ** ** FLSLOADER_E_BUSY: Flash is busy with erase/write ** ** operation. ** ** FLSLOADER_E_NOT_OK: Returned when DET, Sequence error, ** ** Program/Erase verify errors occur, SourceAddressPtr is** ** null pointer. ** ** FLSLOADER_E_LOCKED: Programming a locked sector. ** ** ** ** Description : This function is used to program a page of internal ** ** Flash. Sectors of PFlash and DFlash can be programmed. ** *******************************************************************************/
/******************************************************************************* ** Syntax : FlsLoader_ReturnType FlsLoader_Erase( ** ** const FlsLoader_AddressType TargetAddress, ** ** const FlsLoader_LengthType Length ** ** ) ** ** ** ** Service ID : 0x32 ** ** ** ** Sync/Async : Synchronous ** ** ** ** Reentrancy : Non Reentrant ** ** ** ** Parameters(in) : Length: Number of Flash (PFlash or DFlash) sectors to ** ** be erased. Note: Number of sectors should lie within ** ** single Flash bank. Erase operation across the Flash ** ** banks is not supported. ** ** TargetAddress: Target address in Flash memory. It ** ** should be aligned to the following sector sizes of the ** ** selected Flash for erase. ** ** PFlash: 16 Kbyte ** ** DFlash: 4 Kbyte ** ** ** ** Parameters (out) : None ** ** ** ** Return value : FLSLOADER_E_OK: Successful completion. ** ** FLSLOADER_E_BUSY: Flash is busy with erase/write ** ** operation. ** ** FLSLOADER_E_NOT_OK: Returned when DET, Sequence error, ** ** Erase verify errors occur. ** ** FLSLOADER_E_LOCKED: Sector is protected. ** ** ** ** Description : This function erases the logical sectors of the ** internal Flash. The completion of this operation is ** denoted by clearing of busy status flag or error. **
04
额外需求库
这里比如需要对数据进行CRC 校验
需要对数据包进行数据解密用到的加密算法
等等
05
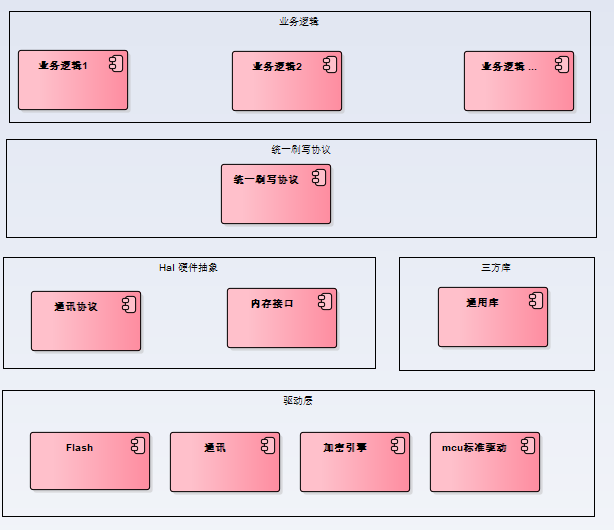
交互逻辑 上层应用
根据具体的OEM 需求实现的功能。比如说。配置参数的交换,与APP软件的有效位相互校验,等等需求。这里无法给出对应代码。
总结 一张图
审核编辑:刘清
-
CAN总线
+关注
关注
145文章
1963浏览量
131458 -
OEM
+关注
关注
4文章
404浏览量
50679 -
上位机
+关注
关注
27文章
948浏览量
55184 -
bootloader
+关注
关注
2文章
237浏览量
46007 -
加密解密算法
+关注
关注
0文章
7浏览量
1629
原文标题:一文了解 -- bootloader
文章出处:【微信号:新能源入门客,微信公众号:新能源入门客】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是Bootloader 浅谈STM32中bootloader的内存分配
有老哥用过Bootloader吗?小弟有问题请教!
一文了解BLDC与PMSM的区别
Bootloader是什么Bootloader的介绍和过程详细解





 工商网监
工商网监
评论