 简要介绍ActiveSLAM的应用场景
简要介绍ActiveSLAM的应用场景

1 前言
SLAM(The Simultaneous Localisation and Mapping)中文的意思是同时定位和地图绘制,即将一个移动机器人(也可以是水下机器人(ROV)或者无人机(UAV))放置于一个位置环境中的一个未知位置,在没有先验图的情况下,机器人可以自主地逐步构建周围环境的一致地图,同时可以在环境中确定自身的位置。SLAM问题自90年代提出以来,被视作移动机器人领域的“圣杯”,它是使机器人完全实现自主的手段,是机器人的核心技术之一。
对于SLAM技术的研究目前已经发展的比较成熟,框架也比较完善,但在技术落地的过程中免不了会遇到各种各样的问题,学者将不同的方法引入SLAM框架进行完善,进而产生了各种各样的SLAM方法,ActiveSLAM就是其中一种。
本篇文章先简单介绍SLAM框架,然后会通过一个例子简要介绍ActiveSLAM的应用场景,最后会对ActiveSLAM问题以及他的解决方案进行阐述。
2 SLAM简述
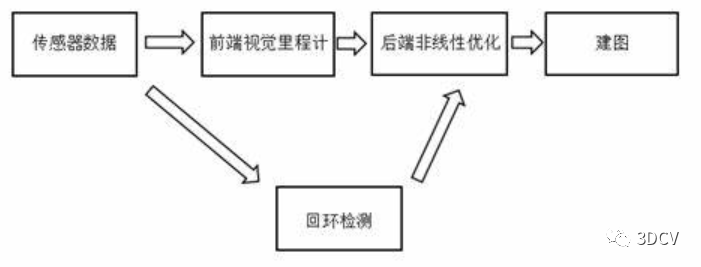
一个经典的视觉SLAM框架由五部分组成:传感器的信息读取、前端的视觉里程计、后端的优化、回环检测、建图。
传感器信息读取:在视觉SLAM中主要为相机图像信息的读取和预处理,在机器人系统中还包括编码器、IMU等其他传感器信息的读取和融合。
前端视觉里程计(VO):用于估算相邻图像间相机的运动以及局部地图的样子。
后端(非线性)优化(Optimization):后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。
回环检测(Loop Closure Detection):回环检测判断机器人是否到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
建图(Manning):它根据估计的轨迹,建立与任务要求对应的地图。
3 一个例子
想象这样一种情况:一架无人机要穿过某个地形,前往一个目标点进行物品运输,无人机上配备视觉传感器,通过SLAM技术实现自身定位,沿途有两种选择:
穿过沙漠前往目标点:距离更短,但特征纹理单一
穿过丛林前往目标点:距离稍长,但特征纹理丰富
在传统情况下,可能会选择穿过沙漠前往目标点,但是由于沙漠中特征纹理过于单一,无人机在穿越沙漠的过程中很有可能会出现里程计漂移甚至定位失败的情况,这样不仅不能完成任务,而且还会造成的巨大损失。
ActiveSLAM的提出就是为了解决这一问题,ActiveSLAM会将机器人导航过程中更多其他的信息(比如:定位精度、光照影响、安全因素等)加入到路径选择过程中,虽然有时候会付出一些代价(比如路径更长,造成燃油等损耗的提高),但这些代价与考虑进去的信息相比往往无关痛痒;比如这里如果选择穿过丛林前往目标点,虽然距离稍长,会造成一些燃油损耗,但由于丛林中有丰富的纹理信息,可以保证无人机的定位精度,使得无人机可以更安全到达目标点。
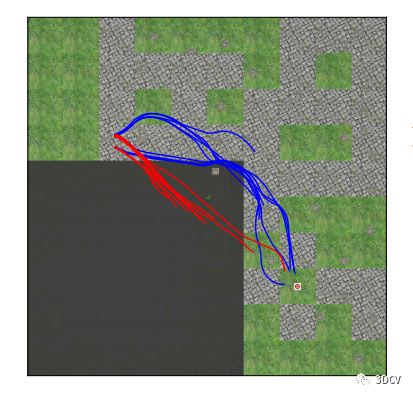
比如下面这张图:蓝色的路径虽然距离更长,但由于沿途有丰富的纹理特征,可以顺利地到达目标点;而红色的路径虽然距离更短,但由于纹理特征的缺失,很多导航都在半路失败了,并没有到达目标点。
4 Active SLAM问题概述
经典的SLAM问题的解决使得机器人拥有了在环境中自由移动的能力,但这也给运动规划算法带来了额外的限制。具体来说,机器人的运动会影响相机捕捉到的信息,从而影响感知算法的性能。换句话说,当机器人移动到一个位置时,相机捕捉到的信息可能不是最优的。因此SLAM界最近新兴起了一种新型的SLAM算法,这种算法在进行运动规划时需要考虑视觉感知的需求,这就是所谓的Active SLAM(主动SLAM)
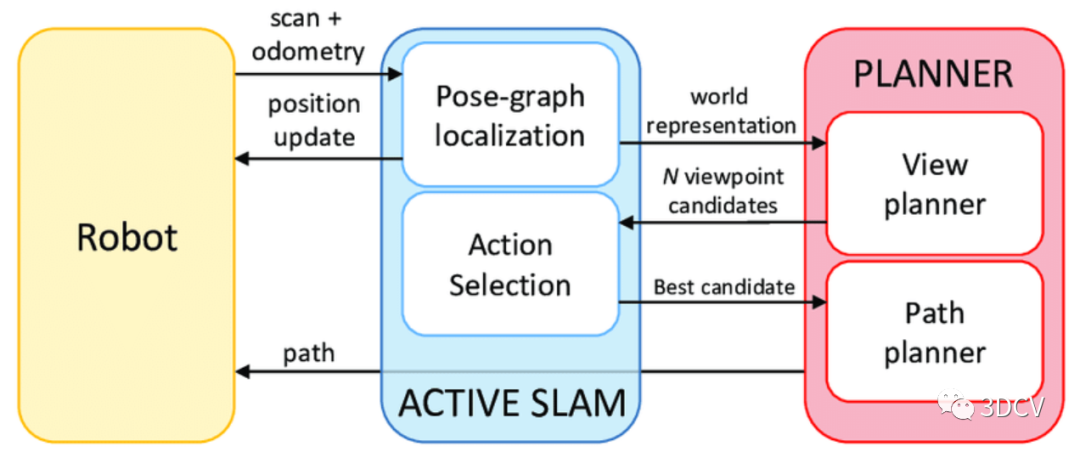
著名的ActiveSLAM框架包括模型预测控制(MPC)框架[1,2]和部分可观察马尔科夫决策过程(POMDP)形式化[3]。主动SLAM的目的是如何在探索新区域和重新访问已知空间之间取得平衡,并为机器人选择最优的未来轨迹。这涉及到了三个基本问题:
生成候选路径
评价标准的选择
在生成的路径中选择最优路径
主动SLAM在现实中的意义也十分重大,许多农业任务,如灌溉、虫害控制和施肥,都涉及覆盖任务,并且是在没有GPS全球定位信息的室内环境中进行的。为了避免SLAM结果中不确定性增长可能导致的较大漂移和任务失败,主动SLAM是有利的。一般来说,在这项任务中,可以获得温室的粗略平面图,并提供有关障碍的先验信息。地图的特征可以定义为来自图像的普通视觉特征(如ORB特征和SIFT特征)和任何检测到的对象(如水果和植物)。
5 Active SLAM问题解决方案
针对于上一节中提到的主动SLAM的三个基本问题, 我们分别论述其解决方案。
生成可用动作集(轨迹)的两种主要方法是基于动态的方法和基于几何的方法。在基于动态的方法中,未来候选轨迹是利用机器人模型或潜在信息场来获得的。流行的MPC和POMDP框架都属于这一类。基于几何的方法的灵感来自于路径规划算法,如RRT,A和D*。然而,复杂环境下的实际系统很难满足动态约束,这限制了这些方法的实用性。因此,动态方法比基于几何的方法更受欢迎。
评价指标的选择用于确定地图或机器人位姿的不确定性,正确地解释不确定性对于主动SLAM算法非常重要,特别是对于航位推算场景,在这种场景中机器人姿态的不确定性会增加。如果在这种情况下单调性不成立,主动SLAM算法可以在不确定性降低的错误信念下执行动作,常见的评价准则有有A-opt、D-opt和E-opt准则,它们用来计算预测的Fisher信息矩阵(FIM),A-opt和E-opt在一些情况下会失去单调性,而D-opt往往不会失去单调性[4,5]。
选择最优轨迹是一个具有多约束的非凸非线性最优控制问题。直接方法是一种常见的解决方法,其中的问题是在离散优化领域中制定。减小了搜索空间的大小,但解是次优的;一个重要的示例是基于前沿的探索。其他方法的目的是在连续置信空间[6]中搜索局部最优策略。寻找主动SLAM的最优(甚至次优)解决方案仍然具有挑战性。
审核编辑:刘清
-
传感器
+关注
关注
2578文章
55771浏览量
795101 -
机器人
+关注
关注
214文章
31611浏览量
224319 -
编码器
+关注
关注
45文章
4021浏览量
143683 -
MPC
+关注
关注
2文章
38浏览量
21764 -
SLAM
+关注
关注
24文章
460浏览量
33442
原文标题:浅析ActiveSLAM
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论