 使监控摄像头能够在不被听到的情况下捕捉场景
使监控摄像头能够在不被听到的情况下捕捉场景

Brian Kostecka 和 Michael Jackson
本博客讨论了步进电机噪声的两个主要因素 - 振动和电流纹波 - 以及克服它们的传统方法。然后,本文考虑了ADI公司的Trinamic团队所做的其他改进,以实现有效监控摄像头运行所需的更平滑、更安静的步进电机性能。
克服问题1 - 振动
根据设计,步进电机通过固定数量的机械步进 - 通常每转200个完整步 - 对应于每步1.8度。传统上,它们使用“全步进”控制,其中定子相线圈通电以产生磁场,将转子推向下一个完整步进。然而,当在步骤之间转换时,转子不受任何形式的控制,这会导致抖动转移到电机外壳中,从而导致机械振动,产生可闻噪声。
微步 - 全步之间的一种受控运动形式 - 是解决振动引起的噪声 问题的 第一阶段。 这涉及让电机驱动器产生精确的控制电流,以将转子移动到每个完整步骤之间的n个中间位置。最常见的方法是 每整步使用 16 微步,即 1/16 微步。 虽然这减少了振动,但并不能 完全消除振动。 为了进一步改进这一点,ADI公司的Trinamic团队开发了一种分辨率更高的 电机驱动器,具有1/256微秒的TEPS。这导致整个步骤之间的移动异常 平稳,大大降低了振动水平,从而降低了产生的噪音水平 。 图 2 显示了提高分辨率的增量优势。在i个全步控制下,驱动电流 变化迅速, 导致目标值附近的振荡离子。 随着 微步s数量的 增加,振荡开始减少,电流波形更接近所需的 理想正弦形状为了顺利移动。
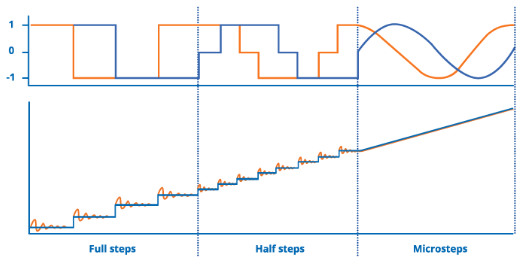
图 2:比较不同步进分辨率的电机电流
克服问题2 – 电流纹波
基于微步进的优势,第二阶段努力使电机控制电流尽可能正弦。传统的电流模式方法允许电机驱动器监视和调整电流,并改变MOSFET开关频率。不幸的是,不断改变开关是必要的,因为步进电机几乎总是产生几毫伏的测量噪声,但这会产生产生可听噪声的不良副作用。
ADI公司的Trinamic团队通过开发一种称为StealthChop的电压(而不是电流)控制方法解决了这个问题,该方法执行控制电压的脉宽调制(PWM)。使用固定频率可防止因改变开关频率而引起的可闻噪声。图3比较了使用电流控制与隐形斩波的电机线圈电压。使用StealthChop,电机控制电压中没有可见的频率抖动。
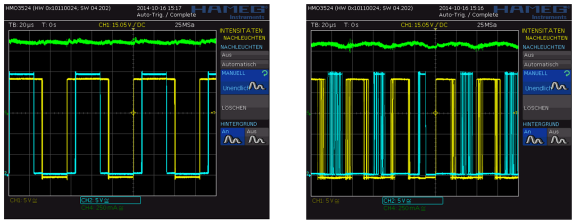
图 3:比较用于 StealthChop 的电机线圈电压(左)与使用电流模式方法(右)
此外,除了减少可听见的噪音外,StealthChop 还产生具有更平滑轮廓的正弦波,从而提供了进一步减少振动的额外优势。对于有效的 PTZ 监控摄像机,使用 1/256 微步的 StealthChop 是实现低噪音和低振动的最佳方法。
审核编辑:郭婷
-
线圈
+关注
关注
14文章
1899浏览量
47327 -
摄像头
+关注
关注
61文章
5128浏览量
103608 -
步进电机
+关注
关注
153文章
3277浏览量
152888
发布评论请先 登录
监控摄像头的选型方法
网络摄像头监控的系统优势
b+如何连接多个摄像头?
【OK210申请】简易摄像头监控系统
在已知(确定)视频编解码芯片的情况下,如何选择相应的摄像头呢?
罗技备130万像素传感器的合金版摄像头问世
监控摄像头无法远程监控的故障原因以及解决办法
超级看看 icsee 摇头机 监控摄像头 无法查看 故障
如何用VideoCapture进行USB摄像头的视频捕捉呢
无线监控摄像头怎么装
积水自动监控摄像头

红外摄像头模组是什么?科技时代的眼睛




评论