 使用三纳米电机控制的PTZ安全摄像机
使用三纳米电机控制的PTZ安全摄像机
传统裤子倾斜变焦 (PTZ) 安全摄像机有节奏的扫荡运动意味着它们并非万无一失——入侵者在首先观察其指向的方向后很容易溜过一个。此外,负责同时监控多个摄像机流的过度劳累的安保人员很容易错过单个馈送中的场景变化。现代 PTZ 摄像机(图 1)配备了传感器和智能图像处理器,能够实时自主跟踪物体,并可以自动提醒安保人员场景变化。但是,旧相机中使用的运动控制系统不再适合用途,并且无法支持此功能。本博客系列着眼于当今自主跟踪PTZ摄像机的一些关键设计挑战,并介绍了Trinamic电机控制解决方案可以解决这些问题的方法,从平稳和准确的运动要求开始。
PTZ 摄像机必须能够水平(平移)和垂直(倾斜)移动,并改变其视野(缩放)。与固定摄像机相比,这些运动平面允许它们测量更广泛的区域,但需要三个独立的电机,每个电机必须提供:
平滑运动:如果电机没有平稳地移动到其目标位置,则相机馈送将显得生涩,使观看者在电机的加速和减速阶段难以观察视频流。
高精度快速跟踪:电机必须快速精确地移动以跟踪移动物体。否则,它可能会从视野中消失。
低振动和噪音:必须尽量减少振动,以防止整个摄像机晃动,从而难以查看观察到的场景。噪音会干扰音频信号,也可能提醒入侵者注意摄像机的存在。
传统上,使用“恒定关断时间”算法驱动的步进电机使相机能够移动。然而,这种类型的算法会导致电流波形中出现明显的转矩纹波,并产生可闻的电机噪声。现代步进电机使用微步进,每整步最多 256 微步,这意味着每转一圈就有 51,200 微步。这使得相机移动更加平滑、安静和精确,但对于MCU来说,以这种分辨率运行步进电机是很困难的。例如,要以每秒10转的速度旋转电机,所需的PWM输出步进频率为512000赫兹,并且很难找到一个微控制器来为多个电机执行此操作。
ADI Trinamic的展讯算法提供平滑、精确的运动
ADI公司的Trinamic团队专注于运动控制解决方案,并开发了广泛的先进技术来控制步进电机(和其他)的运动,包括基于硬件的电机驱动器和运动控制器。它们提供专用的硬件斜坡发生器,可用于产生高达 4 MHz 的步进频率。这种方法减轻了主摄像头微控制器的阶梯配置文件生成,使其能够专注于其他任务,如管理视频馈送。
过去,使用梯形轮廓生成运动是很常见的。电机将不断加速到定义的速度并保持它,直到达到恒定的减速阶段。由这种突然的加速和减速引起的启动和停止运动可以在摄像机的视频馈送中看到。为了克服梯形算法引起的抖动问题,Trinamic 基于硬件的运动控制器使用了一种称为 SixPoint 斜坡的更高级算法。这会在轮廓中引入两个加速段和两个减速段。添加辅助加速 (A1) 和减速 (D1) 段(图1)可在摄像机行程的开始和结束时降低加速和减速,通过允许摄像机的电机更平稳地启动和停止移动来提高视频馈送的质量。
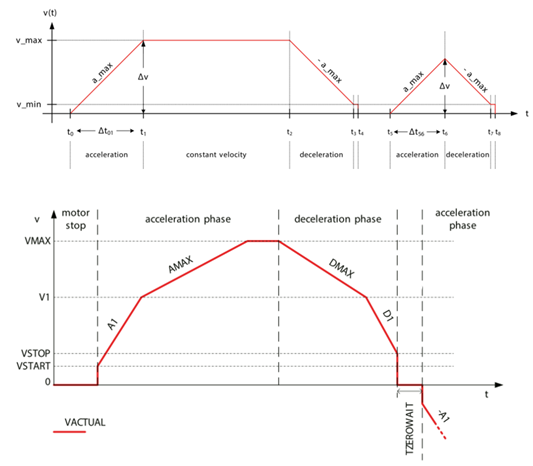
图1 梯形与六点斜坡
电机驱动器的主要功能是产生使其旋转所需的电流。驱动MOSFET必须以足够的精度打开和关闭,以确保驱动器的电气位置与电机的机械位置对齐。这种精确的切换可确保摄像机沿指令方向和速度移动。如果切换执行不正确,则电气和机械位置之间的不匹配会导致能量浪费、不必要的噪音和抖动。极端不匹配(90度或更大)甚至会导致电机失速。
ADI Trinamic的SpreadCycle步进电机控制算法使用目标值周围的迟滞来提供精确的驱动电流,确保电流正弦波在全步跃转换时平滑过零。这很重要,因为整个步骤比微步骤具有更高的扭矩,如果执行不正确,可能会导致生涩运动。SpreadCycle消除了全步转换时的抖动,是需要捕捉高速入侵者运动的摄像机的理想选择!
审核编辑:郭婷
-
微控制器
+关注
关注
48文章
7530浏览量
151227 -
控制器
+关注
关注
112文章
16275浏览量
177729 -
摄像头
+关注
关注
59文章
4829浏览量
95575 -
步进电机
+关注
关注
150文章
3104浏览量
147403
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论