 图像流AXI-Stream生成BMP文件的实现思路
图像流AXI-Stream生成BMP文件的实现思路

实现思路
在实现上,由于bmp除去文件头后也只是把图像流数据按顺序放而已,所以这里
- 先用一个fifo缓存图像数据
- 写一个状态机控制按顺序输出文件头和数据。
- 注意fifo的读写和AXIS之间的握手和控制逻辑。因为看起来fifo是暂存数据的,但可预见fifo应该是有可能周期性空的,因为在每行的结束后tlast都是让valid拉低一个周期,这一小个周期在行多了之后一点会抵消文件头的大小。
生成缓存fifo
声明:
- 命名并不规范
- 可以用原语(xpm)或其他同类型IP生成,这里不多赘述。
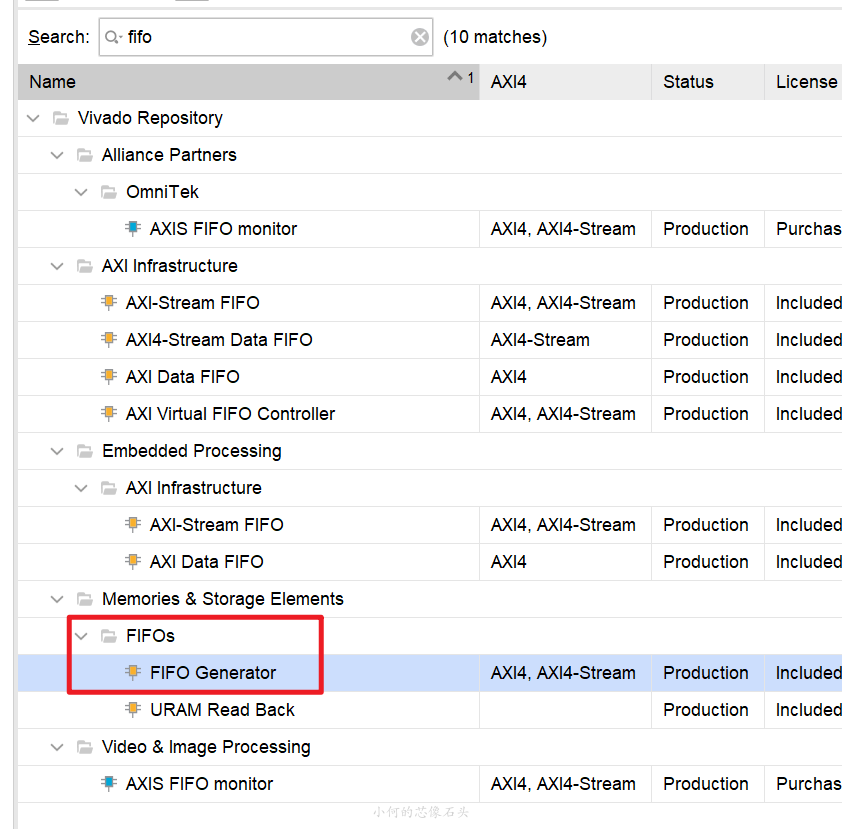
在IP catalog的搜索框中写fifo,选FIFO Generator:
具体按下面设置:
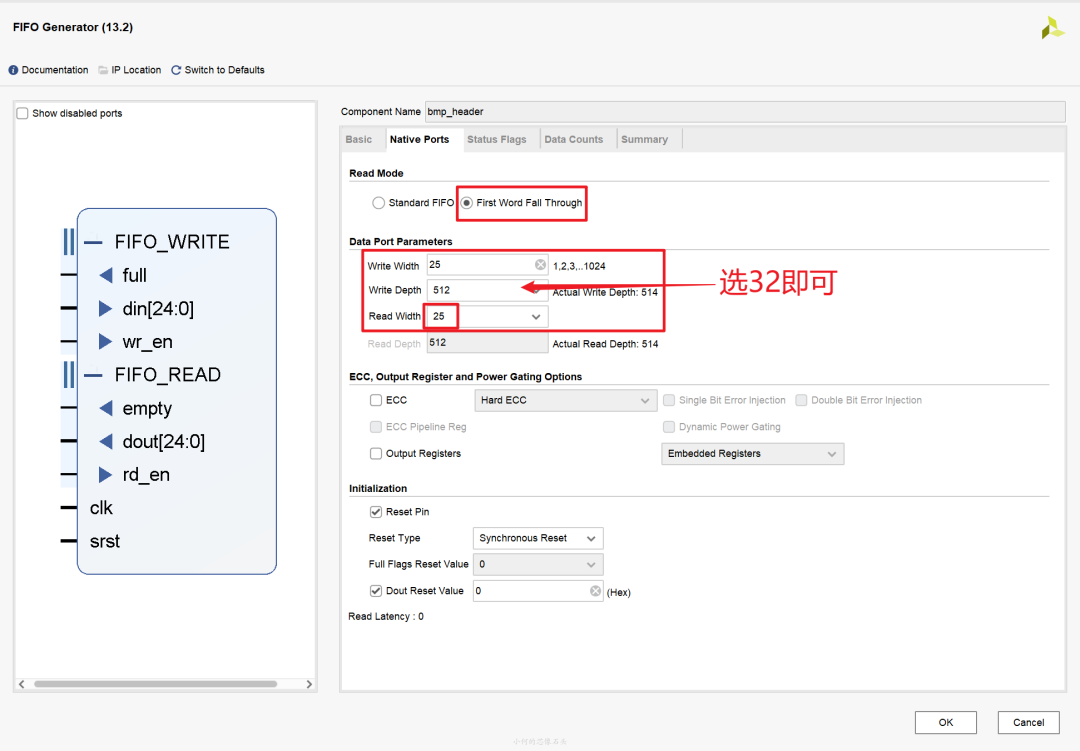
这里注意必须选择First Word Fall Through
选25位是因为,在数据结构上是1tuser + 2*8 data,选择把帧开始标志也丢进fifo可以避免错帧。
总体端口
生成的BMP文件依然以AXIS格式输出,在tb中再以二进制格式写进文件:
module axis2bmp#(
parameter PIC_HEIGHT = 1080,
parameter PIC_WIDTH = 1920
)(
// global signal
input clk_i, // clock
input rst_n_i, // reset
// axi stream (slave) interface signal - > pixel data
input [23:0] s_axis_video_tdata, // DATA
input [0:0] s_axis_video_tvalid, // VALID
output [0:0] s_axis_video_tready, // READY
input [0:0] s_axis_video_tuser, // SOF
input [0:0] s_axis_video_tlast, // EOL
// axi stream (master) interface signal - > bmp
output reg [23:0] m_axis_video_tdata, // DATA
output [ 0:0] m_axis_video_tvalid, // VALID
input [ 0:0] m_axis_video_tready, // (meaningless)
output [ 0:0] m_axis_video_tlast // end of file stream
);
slave端为图像数据,master端为输出BMP文件流,这里需要注意master流中并不处理反压问题(即没有ready信号,懒得加fifo)
fifo接口逻辑
// image pixel fifo dw=24, BRAM cap=512
wire [24:0] bmp_header_din;
wire [0:0] bmp_header_wr;
wire [0:0] bmp_header_full;
wire [0:0] bmp_header_empty;
wire [0:0] bmp_header_rd;
wire [24:0] bmp_header_dout;
bmp_header bmp_header_inst (
.clk(clk_i), // input wire clk
.srst(~rst_n_i), // input wire srst
.din(bmp_header_din), // input wire [23 : 0] din
.wr_en(bmp_header_wr), // input wire wr_en
.rd_en(bmp_header_rd), // input wire rd_en
.dout(bmp_header_dout), // output wire [23 : 0] dout
.full(bmp_header_full), // output wire full
.empty(bmp_header_empty) // output wire empty
);
// pixel fifo assignment
assign bmp_header_din = {s_axis_video_tuser,s_axis_video_tdata};
assign s_axis_video_tready = ~bmp_header_full;
assign bmp_header_wr = s_axis_video_tready && s_axis_video_tvalid;
fifo的读使能放到后面再讲,这里先处理好数据进来就可以了
文件流处理状态机
经典三板斧,不展开
包头数据准备
需要搬回第一篇中的BMP文件格式,由于是输出,所以我们就不考虑调色板了:
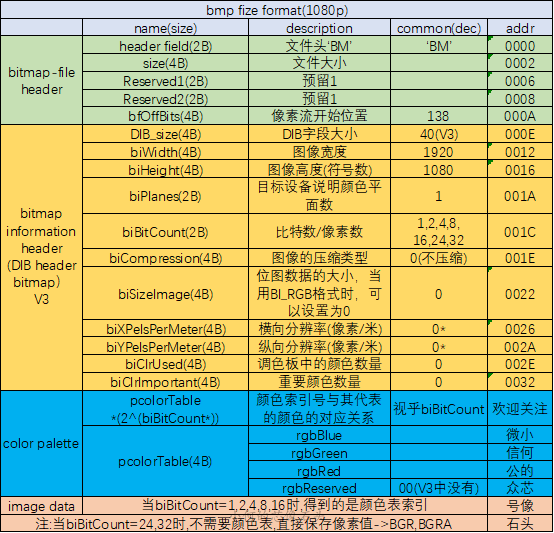
这里先用一些localparam存起来,(这里考虑大小不变)
//--------------------------写BMP状态机------------------------
// local parameter
localparam [15:0] bfType = 16'h4d42;
localparam [31:0] bfReserved = 32'h0000_0000;
localparam [31:0] biSizeImage = PIC_HEIGHT * PIC_WIDTH * 3;
localparam [31:0] biSizeImage_cnt = PIC_HEIGHT * PIC_WIDTH;
localparam [31:0] bfOffset = 32'd54;
localparam [31:0] bfSize = biSizeImage + bfOffset;
localparam [31:0] biSize = 32'h28;
localparam [31:0] biWidth = PIC_WIDTH;
localparam [31:0] biHeight = PIC_HEIGHT;
localparam [15:0] biPlanes = 16'd1;
localparam [15:0] biBitCount = 16'd24;
localparam [31:0] biCompression = 32'd0;
localparam [127:0] biUseless = 128'd0;
localparam CNT_PIXEL = $clog2(PIC_HEIGHT*PIC_WIDTH);
转移状态
//转移状态
localparam S_WAIT = 3'b001 ; // 等待SOF标记
localparam S_WRITE_HEADER = 3'b010 ; // 写BMP包头
localparam S_WRITE_DATA = 3'b100 ; // 写BMP数据
状态转移变量
//状态转移变量
reg [2:0] state, n_state; // 状态寄存器
reg [4:0] header_cnt; // 包头计数器
reg [CNT_PIXEL-1:0] pixel_cnt; // 像素计数器
wire frame_start = bmp_header_dout[24]; // SOF flag
wire write_header_done = (header_cnt == 5'd17); // 18 -1 - > 18*3
wire write_pixel_done = (pixel_cnt == biSizeImage_cnt -1'b1);
这里需要注意 : 两个状态只由计数器指定跳转
状态转移
//状态机初始化
always @ (posedge clk_i) begin
if(~rst_n_i)
state <= S_WAIT;
else
state <= n_state;
end
状态机 状态转移
always @ (*) begin
case(state)
S_WAIT :
if(frame_start)
n_state = S_WRITE_HEADER;
else
n_state = S_WAIT;
S_WRITE_HEADER:
if(write_header_done)
n_state = S_WRITE_DATA;
else
n_state = S_WRITE_HEADER;
S_WRITE_DATA:
if(write_pixel_done)
n_state = S_WAIT;
else
n_state = S_WRITE_DATA;
default:
n_state = S_WAIT;
endcase
end
写BMP包头 处理逻辑
这里直接按照文件格式,用计数器怼进去进行:
always @(posedge clk_i or negedge rst_n_i) begin
if (~rst_n_i)
header_cnt <= 5'd0;
else if(state == S_WRITE_HEADER && header_cnt < 5'd17)
header_cnt <= header_cnt + 1'd1;
else
header_cnt <= 5'd0;
end
在数据上,可参考(注意数据以小端输出):
case (header_cnt)
5'd0 :
m_axis_video_tdata = {bfSize[0+:8], bfType};
5'd1 :
m_axis_video_tdata = bfSize[8+:24];
5'd2 :
m_axis_video_tdata = bfReserved[0 +:24];
5'd3 :
m_axis_video_tdata = {bfOffset[0+:16],bfReserved[24+:8]};
5'd4 :
m_axis_video_tdata = {biSize[0+:8], bfOffset[16+:16]};
5'd5 :
m_axis_video_tdata = biSize[8+:24];
5'd6 :
m_axis_video_tdata = biWidth[0+:24];
5'd7 :
m_axis_video_tdata = {biHeight[0+:16],biWidth[24+:8]};
5'd8 :
m_axis_video_tdata = {biPlanes[0+:8],biHeight[16+:16]};
5'd9 :
m_axis_video_tdata = {biBitCount[0+:16],biPlanes[8+:8]};
5'd10 :
m_axis_video_tdata = biCompression[0+:24];
5'd11 :
m_axis_video_tdata = {biSizeImage[0+:16],biCompression[24+:8]};
5'd12 :
m_axis_video_tdata = {biUseless[0+:8], biSizeImage[16+:16]};
5'd13 :
m_axis_video_tdata = biUseless[8+:24];
5'd14 :
m_axis_video_tdata = biUseless[32+:24];
5'd15 :
m_axis_video_tdata = biUseless[56+:24];
5'd16 :
m_axis_video_tdata = biUseless[80+:24];
5'd17 :
m_axis_video_tdata = biUseless[104+:24];
default:
m_axis_video_tdata = 24'heeeeee;
endcase