 VASS 标准机器人的附加功能
VASS 标准机器人的附加功能

FB 951 F_ROB_NOT
F应用程序组件F_ROB_NOTF(FB951)在F应用程序部件F_FRG(FB950)的内部进行处理,并具有记录机器人的附加功能:
可以通过PLC记录机器人,也可以通过关闭机器人机柜记录机器人。
然后机器人被停用,并且机器人的紧急停止被掩盖。
当机器人PROFIsafe接口处于活动状态且没有连接终止通知时,机器人具有活动信号-1。
如果“IN_ROB_SN_NHL”和“IN_ROB_PSA”有1个信号,则可以注销“IN_ROB_SP”。如果“IN_ROB_SN_NHL”和“IN_ROB_PSA”有1个信号,或者如果“IN_ROB_SN_NHL”和”IN_ROB_PSA“有0个信号,则可以注销“IN_LogOff”。
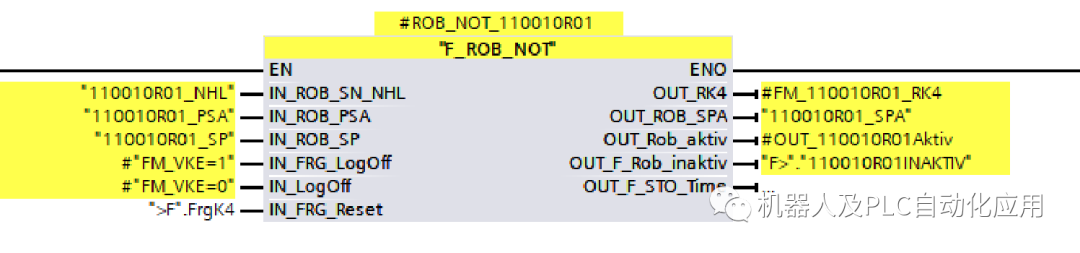
输入参数
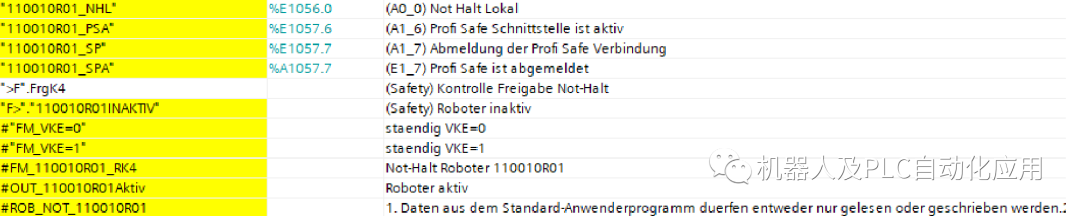
IN_ROB_SN_NHL-机器人本地紧急停止
IN_ROB_PSA-机器人PROFIsafe接口处于活动状态
IN_ROB_SP-机器人通知连接终止
IN_FRG_LogOff-允许注销
IN_LogOff-强制注销
IN_FRG_Reset-启用紧急停止和复位超时
输出参数
OUT_RK4-安全程序紧急停止
OUT_ROB_SPA-PROFisafe已注销
OUT_Rob_aktiv-机器人激活
OUT_F_Rob_inaktiv—机器人不活动
OUT_F_STO_Time-登录或关闭机器人故障超时
注销时超过了时间。在插入F应用程序组件F_ROB_NOT[FB951]之前,您必须从S7程序的块容器中的项目库中复制F应用程序部件F_FRG(FB 950)、F_TON(FB 945)和F_TOF(FB 946),尽管它们还不可用。部件中使用“F_Neustart”标志,必须按照规范进行编程。
Output:
OUT_Rob_aktiv
连接到机器人分配的系统标志。
输出“OUT_F_Rob_inaktiv”具有1个信号,如果:
“OUT_Rob_aktiv”具有0信号。
如果出现以下情况,输出“OUT_F_Rob_inaktiv”为0信号:
1.“OUT_Rob_aktiv”有1个信号。
Output:
OUT_F_Rob_inaktiv
连接到机器人指定的系统标志。
输出“OUT_Rob_aktiv”具有1个信号:
1.“OUT_Rob_aktiv”具有0信号。
输出“OUT_Rob_aktiv”具有0信号:
“OUT_Rob_aktiv”有1个信号。
-
机器人
+关注
关注
214文章
31611浏览量
224321 -
应用程序
+关注
关注
38文章
3347浏览量
60490
原文标题:VASS 标准机器人急停控制:FB 951 F_ROB_NOT
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
什么是工业机器人
nao机器人与其他机器人的区别
华南机器人应用培训中心工业机器人培训班招生
什么是龙人四足机器人?
发现一个好机器人,《机器人的中秋祝福》中的机器人有眼部投影功能哦
机器人、协作机器人和移动机器人,你分的清楚吗
工业机器人的技术原理
智能救援机器人的功能和作用
水下机器人制作需要实现哪些功能呢
机器人是什么?
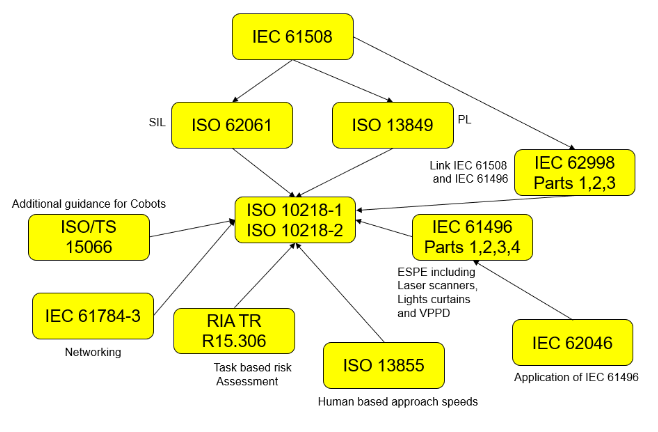
与工业机器人、协作机器人和移动机器人最相关的功能安全标准
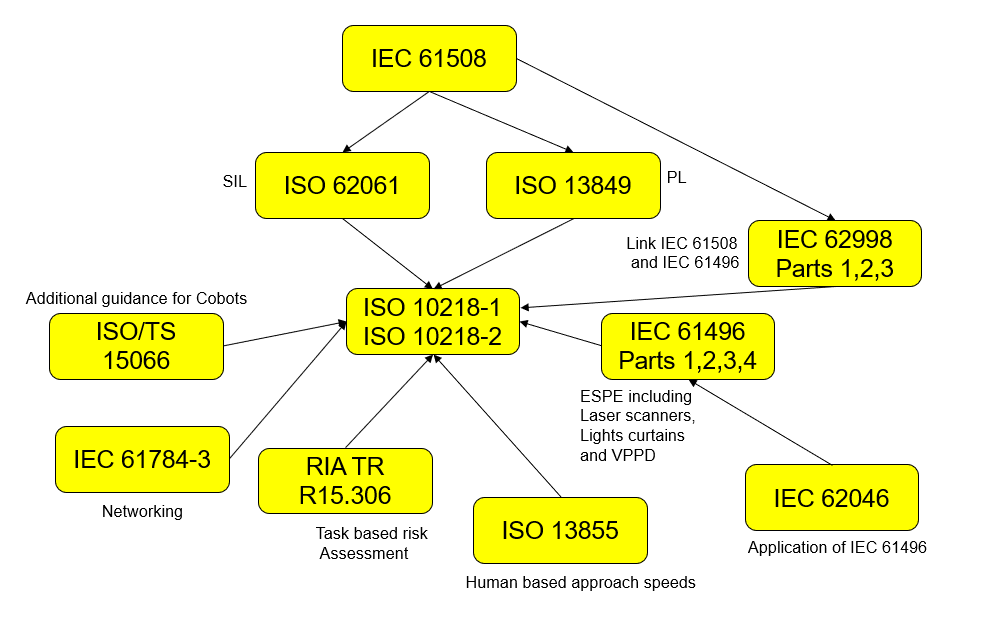
与工业机器人、协作机器人和移动机器人最相关的功能安全标准



评论