 xMR传感器和功能安全
xMR传感器和功能安全
磁阻原理为当今机器和机器人中常见的编码器提供了更小、更便宜、更高性能的升级。较新的传感器甚至可以在不通电的情况下跟踪旋转,因此当电源打开时,您不必在再次启动之前实施归位程序。在没有电源的情况下跟踪旋转似乎是不可能的,但请继续阅读以了解详细信息。当然,增量式编码器可以使用减速齿轮来做到这一点,但与集成解决方案相比,机械部件增加了很多尺寸、重量和不可靠性。
首先,我们来谈谈这些传感器中使用的各种物理原理:
AMR = 各向异性磁电阻,1857 年发现
TMR = 隧道磁阻,1975 年发现
GMR = 巨磁电阻,1998 年发现
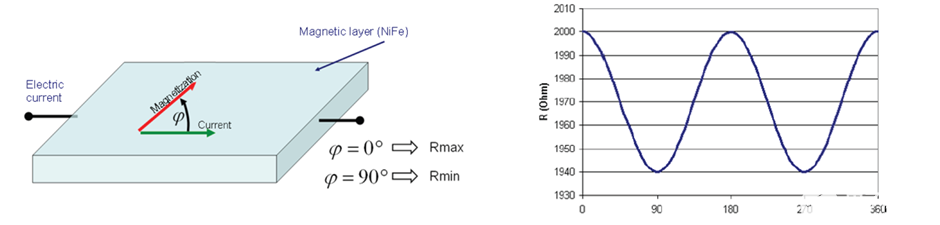
GMR原理仅在1998年被发现,发明者于2007年因这一发现获得了诺贝尔奖。令人印象深刻的是,不到25年后,这个新原理被用于日常应用中的测量。我不会试图解释这三个,因为我是一个功能安全专家而不是磁阻专家,但AMR相对容易解释。对于AMR传感器,载流可磁化导体的电阻会发生变化,并且取决于施加的磁场(例如,来自转子轴末端的磁铁)与电流流动方向之间的角度。在 0 度和 180 度时,电阻最大,在 90 度和 270 度时,电阻最小。电阻的变化约为3%。
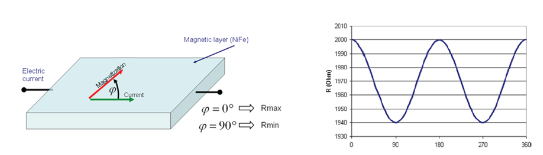
图1 - AMR传感器的工作原理
你可以自己研究TMR和GMR,但至少你现在知道这三者之一是如何工作的。
注意 – 我知道CMR(巨大的磁阻),但据我所知,ADI不使用它。
下图描述了基于AMR原理的简单传感器。它实际上由一个封装中的两个芯片(16 引脚 SOIC)组成——一个传感器芯片和一个仪表放大器芯片。此外,值得注意的是,两个AMR桥彼此成45度角。
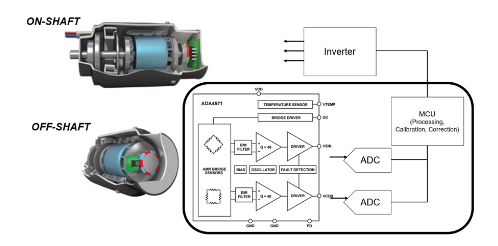
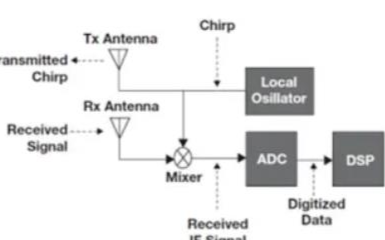
图2 - 基于AMR的传感器及其在传感系统中的位置的框图如上所示
传感器的输出是两个模拟输出,需要通过一对ADC进行数字化处理。从功能安全的角度来看,合适的ADC可能是AD7903,它实际上是一个封装中的两个芯片。从功能安全的角度来看,模拟输出很有吸引力,特别是考虑到信号路径中没有多路复用,因此没有机会混淆信号。
这些传感器可以在 180 度范围内测量绝对角度。
如果试图实现HFT=4571,ADA2-1重复两次,包括输出,应该会有所帮助。高达150'C的指定温度范围意味着这些传感器可以在最热的地方使用。
应用笔记AN-2500解释说,传统编码器上经常用作诊断的半径检查在这里也有效。由于信号没有多路复用,因此任何单个错误都可能导致输出错误、单个值看起来正常以及半径检查通过,这似乎都不可信。
鉴于实现的相对简单性、单芯片解决方案的可靠性和半径检查,这些部件是否需要按照安全标准进行开发并不明显,至少对于工业用途而言。相反,IEC 61508-2:2010 7.4.6.1 中的说明似乎适用于防止引入系统故障模式。
注意 – 我以机器人为例,但显然这些传感器也与符合 IEC 61800-5-2 的变速驱动器相关,以实现 SLS、SLP 等安全功能。
我答应谈谈多圈传感器,这些传感器结合了GMR和AMR原理。
多圈传感器的核心是由GMR元件的多根纳米线组成的巨型磁阻(GMR)材料螺旋。传感器的工作原理基于形状各向异性和在存在外部磁场的情况下在畴壁发生器中生成畴壁。当外部磁场旋转时,畴壁通过连接到畴壁发生器的狭窄螺旋轨道(纳米线)传播,如下所示。无论IC是通电还是无通电,都会发生这种物理效应,即使断电,它们也能跟踪转数。当最终施加功率时,可以测量偶极子的位置。
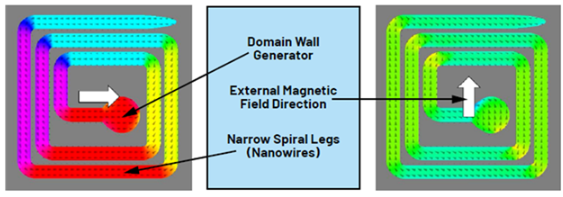
图6 - GMR传感器的工作原理
传感器可以在断电的情况下跟踪多达 +/-23 转(+/-8330 度)。对于使用高齿轮比来权衡速度与扭矩的机器人应用,这可能还不够,但要注意未来的发展。
实际上,您现在可以在一个封装中获得 3 个传感器。
可跟踪 +/-22 转的转数传感器
每180度重复一次的角度传感器
象限传感器,与角度传感器结合使用时,可以跟踪整个0至360度
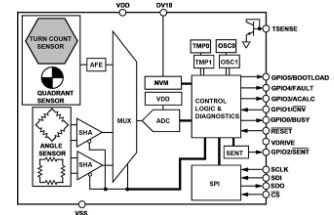
图 7 - ADMT4000 框图,显示了除 ADA4571 的角度传感器外的转数和象限传感器
显然,除了角度/位置之外,这些传感器还可以确定速度。通过在每个轴上进行测量,您可以确定机器人手臂每个部分的速度。在机器人安全标准中,如果没有测量速度并受到安全功能的限制,则必须假设最坏情况下的速度。
虽然这些磁阻传感器是新的,但我已经检查了编码器标准IEC 61800-5-3的功能安全性,并且找不到任何可以困扰这些新传感器类型的内容。但是,我不能说我是IEC 61800-5-3的理想故障检测原理的粉丝,这实际上意味着DC=100%。
目前,多圈传感器没有安全认证,但正在考虑ASIL D解决方案,这对于SIL 3 / PL e以下的应用也很有用。一旦ISO 3修订版10218发布,HFT=1和CAT 3架构的强制使用将结束,这些非接触式传感器的高可靠性应允许实现PFHd要求,即没有高频交易或CAT要求。
审核编辑:郭婷
-
电源
+关注
关注
185文章
17953浏览量
252755 -
机器人
+关注
关注
212文章
28887浏览量
209513 -
编码器
+关注
关注
45文章
3701浏览量
135690
发布评论请先 登录
相关推荐
雷达传感器增强ADAS安全性,实现驾驶员便利功能
MEMS传感器,引领全新智能车安全
AuthenTec指纹传感器提供先进生物辨识安全功能
无线传感器网络的结构与安全问题
传感器的主要功能是什么
具有更多 MEMS 和传感器的汽车未来的功能性和安全性
连接传感器的安全与保障
TDK磁传感器技术市场快速增长,磁传感技术优势明显,霍尔技术和TMR技术也不落下

xMR传感器和功能安全
ToF传感器如何实现汽车安全功能






 工商网监
工商网监
评论