 快速精密DAC应用:硬件在环(HiL)
快速精密DAC应用:硬件在环(HiL)
闭环应用在当今许多新兴技术中得到广泛传播。基本上,传感器确定执行器必须如何操作才能达到预期结果,不断适应环境的变化。一个很好的例子是汽车的巡航控制,其中传感器测量速度和其他参数,驾驶员按照众多电子控制单元(ECU)之一中的算法对油门进行操作。
现在想想巡航控制如何适应倾斜、风切变和重新武装的变化。许多熟悉的概念在这里发挥作用:反应时间、延迟、阶跃响应、压摆率、过冲、负载调节。是的,我们都希望巡航控制系统在坡度变化时保持稳定的速度,并在重新武装时轻轻地达到巡航速度。它最终取决于闭环延迟,即自测量变化并采取行动进行补偿以来所经过的时间。闭环延迟涉及传播速度、转换时间和处理时间。高延迟(如低相位裕量)会使速度振荡。
图 1 描述了巡航控制的潜在驾驶场景。如速度图所示,巡航控制系统对重新布防(阶跃响应)和坡度变化(负载调节)反应良好,但对风切变的反应为时已晚。功率图显示了巡航控制系统为适应不断变化的条件所做的工作。
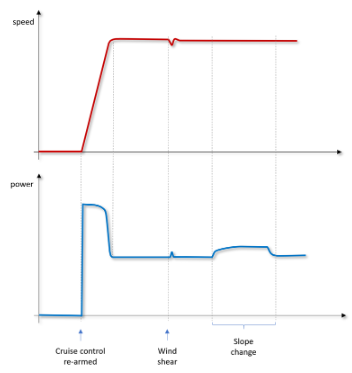
图1.巡航速度控制场景中的速度和功率与时间的关系
让我们考虑制造商的一面。假设您必须在 7 种不同的发动机上测试电子控制单元和巡航控制软件,其中包含数百个测试用例。让真正的汽车全天候巡视赛道是不切实际的。那么,为什么不将ECU连接到模拟汽车行为的设备呢?该模拟器可以 24/7 全天候运行,无需人工干预即可验证软件中的每个微小更改。
这就是我们所说的硬件在环(HiL)。该技术包括用能够连接用于传感和控制的信号的仿真器替换系统的一部分,目的是在多种条件下验证另一部分。
汽车许多部件的电气化促进了这一过程的自动化,因为ECU和仿真器之间的许多交互可以在电气层面进行。
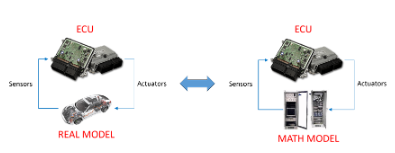
图2.使用 HiL 用自动化实验室测试取代现场测试
从传感器捕获的信号和驱动执行器的信号可以是数字或模拟的,因此仿真器必须包括快速精确的A/D和D/A转换器。从捕获点到驱动点的延迟必须尽可能小,以最大限度地扩大可以使用仿真器的应用程序范围。需要高分辨率和高精度来模拟某些传感器和执行器的大动态范围。
仿真器还可以包括DSP或FPGA,用于处理输入并在连续流上生成输出。该器件的延迟会增加总数,并且可能很大,尤其是在使用FIR滤波器的情况下。
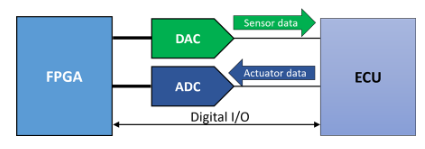
图3.硬件在环系统测试ECU的概念图
总延迟包括ADC和DAC的转换时间、与FPGA之间的数字传输时间、FPGA中的处理时间和DAC输出的建立时间。让我们看一个使用真实设备的示例:
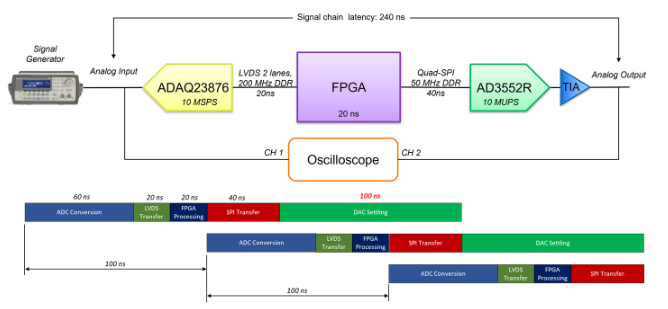
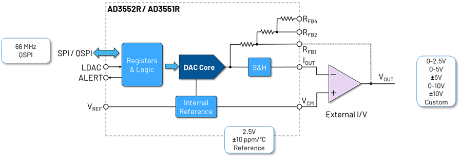
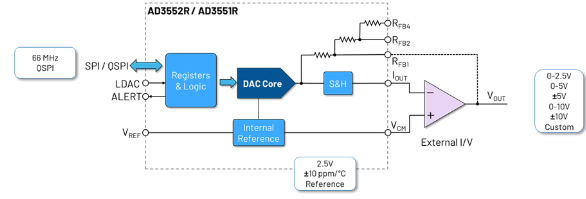
图4.使用ADAQ23876和AD3552R实现硬件在环系统
| 元素 | 率 | 延迟 |
| ADAQ23876 | 10 兆字节 | 100 纳秒 |
| LVDS总线 | 800 帧/秒 | 20 纳秒 |
| FPGA | 160 帧/秒 | 20 纳秒 |
| QSPI 总线 | 400 帧/秒 | 40 纳秒 |
| AD3552R | 10 消音器 | 10 纳秒 |
| TIA 建立时间 | 100 纳秒 |
表 1.硬件在环系统各元件的数据速率和延迟
某些操作可以重叠以提高信号链的更新速率,从而提供更高的信号带宽。但是,闭环带宽仍受总延迟的限制。换言之,器件无法补偿持续时间小于信号链延迟的变化。例如,采集、数据传输和数据处理在DAC的建立时间内进行,从而实现10 MSPS的采样速率。
硬件在环仿真器用于多个技术领域:
ECU 验证和测试。硬件在环系统模拟汽车的行为,产生ECU读取的信号并检查其产生的响应。接口可以是全电气的,也可以通过执行器(DAC驱动产生信号的传感器)。
燃烧/电动/混合动力总成仿真。仿真可以在两个级别进行:
功率级别。电动机使用电子负载进行仿真,HiL系统合成转速和位置信号。
机械水平。硬件在环系统控制电制动器并合成转速、扭矩和位置信号。
电池管理系统 (BMS) 测试或电池组仿真。硬件在环系统模拟每个电池单元的电压,并提供预期的电流。它还可以提供健康信号,例如温度。
电动汽车/光伏逆变器验证和测试。硬件在环系统控制电子负载并综合负载处的电流和电压测量值。
在测试响应时间短的设备时,硬件在环系统是强制性的。除此之外,HiL平台的使用允许在多种场景中自动验证这些设备,并提供广泛的测试计划,并确保在所有条件下都满足严格的要求。这种覆盖水平在现场测试中是不切实际的。
HiL的一个关键部分是信号接口,特别是模拟I/O,它必须快速和准确,需要新的精密ADC和DAC宽度。
审核编辑:郭婷
-
传感器
+关注
关注
2552文章
51233浏览量
754729 -
dac
+关注
关注
43文章
2299浏览量
191212 -
ecu
+关注
关注
14文章
890浏览量
54579
发布评论请先 登录
相关推荐
便携式--硬件在环仿真(HIL)
硬件在环(HIL)测试系统架构
意昂神州BMS硬件在环(HiL)仿真测试
关于高级硬件在环(HIL)您想要了解的十个问题

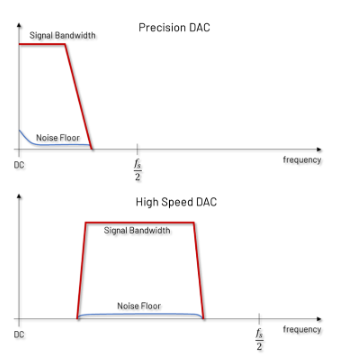
快速精密DAC与高速DAC:异同
详解快速控制原型RCP与硬件在环仿真HIL

快速控制原型RCP与硬件在环仿真HIL该如何区分呢?

【干货分享】硬件在环仿真(HiL)测试






 工商网监
工商网监
评论