 机器人应用的速度和分离监控
机器人应用的速度和分离监控
当人们想到协作机器人时,他们通常会想到UR5,Kuka LRB系列,Fanuc CR-35iA,ABB YuMi等。协作机器人作为工业机器人的一种形式与服务机器人的不同之处在于,它们是为工业环境设计的,用于建造东西,而不是帮助人们的日常生活,但在这两种情况下,它们都是为与人类互动而设计的。
通常,当人们想到协作机器人时,他们会想到实现功率和力限制(PFL)的机器人,我希望在本系列的下一篇博客中对此进行描述。然而,今天我将重点介绍工业机器人安全标准ISO 5-10:4的子条款10218.1.2011中定义的速度和分离监控(SSM)。
使用SSM,可以监控机器人周围的区域,如果有人接近机器人,它最初会减速并最终停止。目标是确保机器人在与人类或部分人类接触之前停止。与PFL相比,SSM的优势在于机器人应该能够运行得更快,从而提高生产率。PFL速度必须很慢,以便在发生碰撞时保持较低的力。使用SSM,机器人不需要立即阻止某人进入某个区域,而是可以监视该人,他们的行进方向,并改变其姿势以远离他们,或者在他们靠近时逐渐减速。最终,机器人/协作机器人可能必须像使用PFL一样慢地运行,以便这两种模式实际上是互补的。放慢速度通常比停止更有效(我总是会说,但我相信有人会想出一个角落案例来证明我是错的)。然后,当人离开时,机器人可以再次开始更快地移动。永远记住,工厂车间的目标是实现尽可能高的生产率,从而需要保持安全。
,在距离绿线一定距离处,机器人可以全速运行,然后在人到达红线之前完全停止。在两者之间,机器人开始减速。可能会在橙色线上发出警告,但输出信号切换设备 (OSSD) 在红线处处于活动状态,机器人应停止或进入 PFL 模式。
线之间距离背后的数学如下所示。它考虑了机器人停止需要多长时间、机器人移动的速度、机器人运动部件的质量、机器人手臂的长度等。通常,假设在工厂车间不允许跑步,并且假设最大步行速度为 1.6 米/秒。
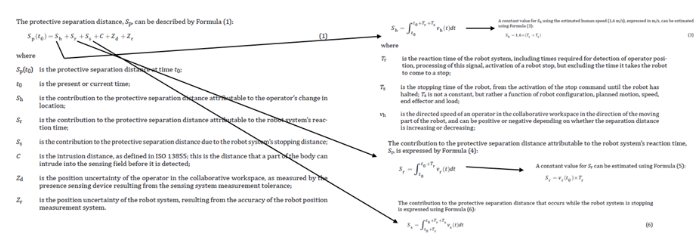
图 3 – 基于 ISO TS 15066 的保护性间隔距离计算
ISO TS 15066的下图显示了上述的实际影响。虽然ISO TS 15066目前是ISO 10218的配套技术规范,但ISO 3的修订版10218将于2022年底发布,ISO TS 15066的内容将在ISO 10218标准范围内。
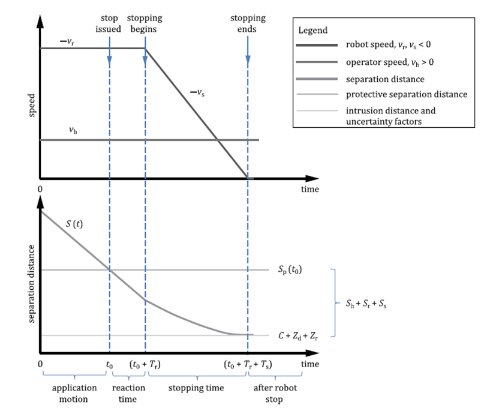
图4 – ISO TS 15066:2016图3
ISO 13855 中也给出了进一步的指导。
ISO 10218-2要求用于实施SSM的传感器(ESPE和AOPD)应符合IEC 61496系列的相关部分。在本系列的后续博客中,我将讨论IEC 61496系列,但现在您只需要知道IEC 61496-2涵盖光幕,IEC 61496-3涵盖激光扫描仪和3D TOF。
显然,使用激光扫描仪、光幕和 3D ToF 传感器并不适合所有应用。例如,如果可以从机器人单元中弹出某些东西,那么某种物理防护或围栏可能会更好。
如果您使用的是电敏防护设备(ESPE),那么与激光扫描仪相比,3D ToF可能具有优势。例如,激光扫描仪仅在单个平面上运行。通常,使用激光扫描仪时,被监控的平面接近地面,因此激光扫描仪无法检测到伸出的手,但可以检测到地板上的尸体。但是,3D ToF相机可以进行三维监控,这意味着您不必为伸出的手留出额外的0.85米。然而,通常情况下,激光扫描仪的范围和FOV(视场)更大(闪光灯与点照明)。为相机设置270度FOV很困难,但对于激光扫描仪来说很常见。但是,由于激光扫描仪内的移动部件,增加的视场会带来可靠性问题。基于摄像头的系统没有移动部件。对于mobots,3D监控可用于检测激光扫描仪可能遗漏的悬垂物体,并且来自3D监控的数据也可用于物体分类,以便机器人在其他机器人面前可以表现得不同而不是人。通过相机生成的丰富数据实现对象分类。为了安全起见,相机和激光扫描仪系统也可用于实现导航等非安全功能。
无论涉及何种技术(扫描仪或相机),典型要求都是符合 ISO 13849 的 PL d、符合 IEC 2/IEC 62061 的 SIL 61508 和符合 IEC 3 的 61496 类。大多数解决方案都针对所有这些指定。
审核编辑:郭婷
-
机器人
+关注
关注
210文章
28144浏览量
206027 -
摄像头
+关注
关注
59文章
4797浏览量
95332 -
激光扫描
+关注
关注
0文章
113浏览量
11421
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论