 您的公差范围有多宽?
您的公差范围有多宽?
清理三号过道,清理三号过道。转过三号过道的拐角,您将面对一个机器人来回踱步(有点),以防止购物者踏入或踩在溢出的物品上。当你接近时,机器人会在撞到你之前停下来。我们知道这是由于传感器造成的,但他们究竟如何计算机器人的停止范围?
本博客的灵感不是来自超市旅行,而是阅读了IEC 61496-4-3附录BB的草案。IEC 61496-4-3 是用于人体存在检测的立体传感器标准。该标准讨论了测量所需的可重复性。该主题也在涵盖 61496D TOF 和 IEC 3 的相关标准 IEC 3-62988 中进行了描述,这些标准讨论了 IEC 61496 系列范围内未包含的类似传感器。
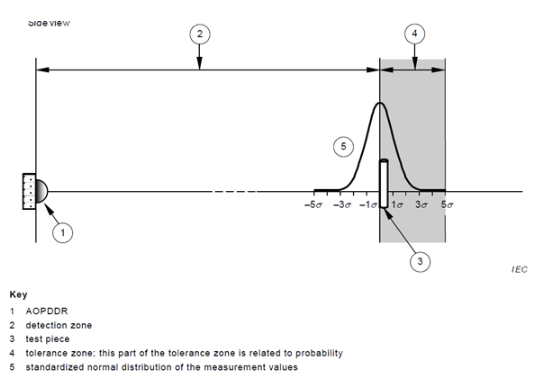
图 1:图片来自 IEC 61496-3 附录 BB
让我们从机器人安全的一些背景开始。在机器人前面会有一个检测区域,用于识别何时有人接近机器人,然后在人到达危险之前停止机器人。查看上图,您会看到必须在检测区域中添加一个公差区,以确保即使在存在噪声的情况下,在距离测量中发现的可变性的情况下,检测到某人的概率也足够高。这意味着,如果您的安全计算表明您应该在距离机器人 1 米处检测到某人,以便保证在机器人到达危险之前停止机器人,您可能需要将行程点设置为 1.05、1.1 或 1.105 米,具体取决于距离测量的可重复性。但是我们如何确定该公差区的宽度呢?
让我们来看看重复性测量背后的数学原理。如果您测量任何模拟量,例如距离,电压,电流,功率,温度1,000次,则可能不会每次都得到完全相同的值,除非您的传感器分辨率与噪声相比真的很差。更有可能的是,您将获得一组通常使用正态分布来表征的测量值。这意味着测量值以平均值和分布测量值为特征,该测量值由上图中钟形曲线所示的标准偏差给出。如果测量值确实正常,则 68.3% 的测量值将在平均值的 1 个标准差范围内,95.4% 的测量值在平均值的 2 个标准差范围内,99.7% 的测量值在平均值的 3 个标准差范围内。
但这与 SIL 有什么关系。
对于 SIL 1 函数,每小时的故障概率需要< 1e-6/h、SIL 2<1e-7/h、SIL 3< 1e-8/h 和 SIL 4 < 1e-9。例如,假设这是一个 SIL 2 函数,因此允许的最大 PFH 为 1e-6/h。因此,68%、95%或99.7%的时间是正确的是不够的,除非很少需要安全功能(安全系统跳闸)。
大多数人认为PFH只考虑随机硬件故障,但这不是PFH的定义。该定义不仅限于随机硬件故障,还可以包括噪声。

图 2:IEC 61508-4:2010 中 PFH 的定义
因此,定义可以包括测量噪声。
假设我们的安全功能由传感器、逻辑块和执行器组成。广泛接受的PFH分配是传感器的35%,因此现在分配给SIL 2安全功能的传感器的最大PFH为350e-7 / h,并且进一步将其中50%分配给随机硬件故障,50%分配给噪声;那么噪声引起的最大允许故障率为1.75e-7/h。
现在它变得棘手了。我们假设3D TOF传感器正在保护笼子里的机器人。安全功能每天只能被调用一次(要求),以便需求速率为每小时 1/24。然而,它也可能是一個協作機器人,估計的需求率可能是每小時17.5次(選擇這個需求率來使數學整潛)。让我们使用协作机器人示例,因此按需允许的最大故障概率变为 1.75e-7/h / 17.5/h =1e-8。
假设我们在距离1D TOF传感器000m处对固定物体进行1,3次测量,并处理数字,得到20mm的标准偏差。我们需要什么保护带来确保按需故障概率< 1e-8?Excel 函数 norm.inv 可以用来给我们一个 112mm 的答案,norm.inv(1e-8,0,20e-3)。因此,将我们的跳变点设置为1.112m可以保证故障率足够低,以允许系统中的噪声。
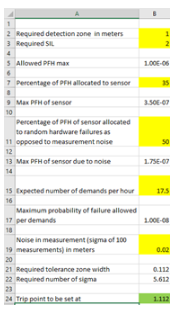
图 3:用于计算的 Excel 电子表格
上面显示了一个Excel电子表格,用于执行上述计算,其中用户以黄色输入所有数据,并在绿色单元格中给出跳变点。类似的逻辑可用于确定温度、电压或其他此类测量的保护带。
对于112mm的假设标准偏差,这意味着5.6西格玛的保护带。
ISO 13849 采用简化的安全方法。示例包括使用的风险评估,它仅确定PL,然后对PFHd施加更差的情况值,然后使用允许的PFHd作为范围的最大值,而不是定量方法,该方法将给出PL范围内的PFHd值(1e-6 / h to 1e-7 / h)。因此,如果风险评估确定需要PL d安全功能,则PFHd限值将变为1e-6 / h。
IEC 61496-3:2018 附录 BB 建议将 5 西格玛的值作为 3 个要求/小时的公差区,但没有给出任何关于这是否足够好的提示。对于PL c及以下可能没问题,但对于PL d,它会耗尽整个PFHD预算和PL e将不足。
对于复杂的系统,我真的认为它们应该按照IEC 61508设计,ISO 13849和IEC 62061都一样,但我认为人们仍然将它们视为设计标准而不是应用标准,但也许这是另一天的博客。
上述其他含义:
如果有多个变异源会影响整个系统的可重复性,则不需要误差源的线性总和。RSS 总和应该没问题,前提是多个错误源不相关。有关更多详细信息,请参阅中心极限定理。
与其在数据表上引用最小/最大规格,不如引用分布的西格玛
如果您只有最小/最大规格,那么如果没有给出其他信息,则 sigma 可以估计为 (最大规格值 – 最小规格值)/6。然而,在某些情况下,这可能是非常保守的。
如果传感器需要定期校准,那么重复性测量实际上应该包括每次测量的校准。那么为什么要将措施限制为一台设备,它不应该真的是 1,000 台设备。
对于像3D TOF传感器这样的东西,测量的西格玛可能随着到测试对象的距离而变化。因此,可能需要多西格玛。
可以说,即使是IEC 61508也存在可靠性数字所需的置信水平仅为70%的问题。因此,硬件可靠性可能会违反PFH值,并且浪费了对噪声测量的严格性。(我需要考虑更多。
您有时需要注意传感器的哪个部分很重要。例如,在4/20mA DAC(数模转换器)中,ADC(模数转换器)作为诊断,重要的是DAC的可重复性还是ADC(模数转换器)的可重复性。我会让你自己弄清楚的。
审核编辑:郭婷
-
转换器
+关注
关注
27文章
8709浏览量
147286 -
adc
+关注
关注
98文章
6503浏览量
544837 -
dac
+关注
关注
43文章
2296浏览量
191135
发布评论请先 登录
相关推荐
在线负公差测径仪 生产场景智能化
公差的等级及应用领域
未注公差角度的极限偏差,GB 11335-89
尺寸公差、形位公差、表面粗糙度的区别和联系及选择方法
指定PCB孔容公差有哪些技巧
尺寸公差、形位公差、表面粗糙度数值上的关系
使用PCB公差提高生产率
公差与配合100问,你都会吗?
M12 17芯插座的公差范围是多少






 工商网监
工商网监
评论