 实施各种软件值得付出努力吗?
实施各种软件值得付出努力吗?
功能安全需要应对随机故障和系统故障。软件只有系统故障,因为软件没有随机故障,因为如果出现相同的情况,软件故障通常每次都以相同的方式导致系统故障。达到更高安全水平的一种方法是实施双通道系统,每个通道中都有不同的软件。具有相同软件的冗余通道会将软件作为单点故障。如果两个通道具有不同的软件,那么争论是它们不太可能同时以相同的方式失败,从而允许更高的SIL索赔。听起来不错,但有问题吗?让我们在博客中更深入地或尽可能深入地了解。
首先,让我们看一下IEC 61508中提供了哪些指导,然后看看文献中提供了哪些指导以及一些基于多样性的设计模式。
在IEC 61508-3:2010中,以下子条款涵盖了这一点
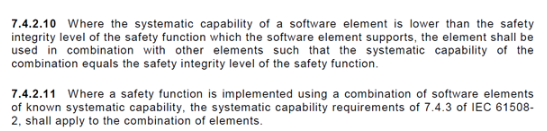
图 1 - IEC 61508-3 的相关摘录
看看IEC 61508-2:2010子条款7.4.3说SC(系统能力)最多只能提高一个级别。因此,例如,如果两个软件的SIL声明为SIL 1,那么组合最多为SIL 2。我想最多只允许增加一个的限制是存在的,因为将这两个项目结合起来的人不知道各个开发的细节,也许可能存在一些隐藏的常见原因故障,例如使用的工具。如果从头开始开发这两个软件,你可能会做得更好。
IEC 61508-3 附录 A 中的表格提供了一些指导,表 A.2 提供了不同架构的四种替代版本,表 A.10 要求对软件进行 CCF(常见原因故障)分析,此措施建议在 SIL 2 中,强烈建议用于更高的 SIL。
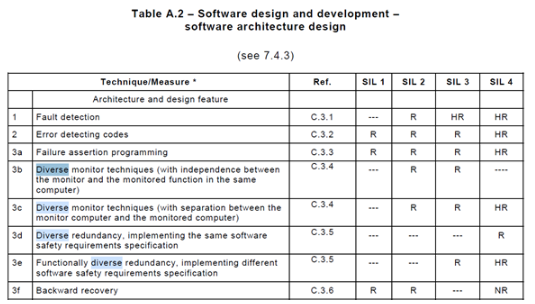
图 2 - IEC 61508-3:2010 摘录
但是开发各种软件有多难。Philip Koopman在他的优秀著作“更好的嵌入式系统软件”第26.3.3节中对这个话题有一个很好的评论。在本节中,他指出,实现真正多样化的软件确实很困难,但很容易获得一定程度的多样性。他指出,量化所实现的多样性也很难,这并不奇怪,因为硬件CCF分析在标准中有更多的指导,仍然更多的是工程判断而不是科学。Philip Koopman进一步警告说,“许多人(包括我们)认为,如果你的时间和资源有限,你最好制作一个真正好的软件版本,而不是试图制作两个独立的版本,而这两个版本本身就没有那么好。两个版本中可能会有太多相同的错误。
我看了看是否有任何研究来支持这一观点。我看到的关于这个主题最有趣的笔记是下面显示的,他们给 27 名学生提供了一个规范,并要求他们编写软件来实现它,然后检查有多少不同的软件以同样的方式失败。它确实支持了编写各种软件确实很难的观点。
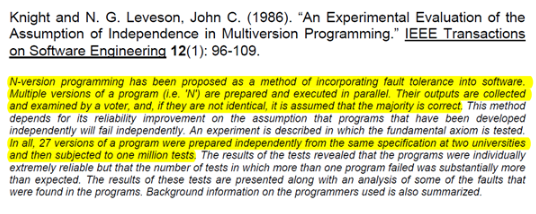
图3 - 关于不同软件价值的有趣实验论文
然后是HSE数据,它们显示了编码阶段(设计和实现)中很少的错误,这表明除非规范具有多样性,否则您不会获得很多好处。
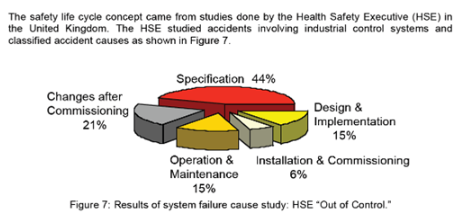
图4 - 系统因HSE而失败的原因
为波音777开发电传飞行软件的团队似乎已经采用了三种不同的软件,开发了三种不同的规格,使用三个不同的开发团队,他们不应该相互交谈,运行在三台不同的(不同的)计算机上控制飞机。然后,当其中一个产出与其他产出不一致时,使用选民来选择行动方案。
航天飞机使用了一种类似的架构,使用五台计算机,四台相同,一台不同。各种微型计算机上的软件也多种多样。
基于多样性的功能安全软件的一种设计模式是N版本编程,它使用根据同一组需求开发的不同代码的多个版本,并对其输出进行投票。
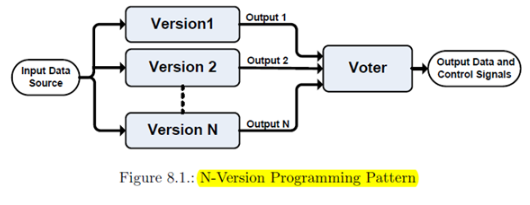
图 5 - N 版本编程模式的绘制(安全关键型嵌入式系统的设计模式))
如果我们将上述内容视为可靠性框图,那么投票者是CCF来源的明显弱点,除非投票者是超可靠的,否则从高值N中获得的好处将是有限的。
让我们将多样化的软件方法与一些替代方案进行比较。双核锁步微控制器不实现软件分集,而是一种硬件安全机制,因为两个内核将运行相同的软件。相比之下,软件锁步/软件 RMT 与逐周期锁步不同,可以实现软件多样性,但比时钟逐周期锁步方法检测差异的时间更长。软件锁步可以在不同的处理器上运行,甚至可以在单个处理器的冗余线程上运行,并在选定的观察点比较它们的输出。
即使您实施了各种软件,用于生产软件的工具呢?这些也可能是常见原因故障的根源,但如果在CCF中考虑到这一点并选择了不同的工具,或者选择的工具以满足整体安全功能的SIL要求,或者您使用适合组合元件SIL的工具,您可能很高兴。
审核编辑:郭婷
-
微控制器
+关注
关注
48文章
7668浏览量
152254 -
处理器
+关注
关注
68文章
19461浏览量
231413 -
嵌入式
+关注
关注
5096文章
19199浏览量
308282
发布评论请先 登录
相关推荐
在我们得到的时候是否需要付出
项目管理软件在软件实施服务行业的运用
芈月传中值得我们温度传感器厂家学习的一句话“您付出多少,就会回报多少”
CRM软件成功实施的6个步骤?!
企业为什么需要实施MES系统软件?
如何实施软件AES以及AES加密/解密
ARMv8-A TrustZone软件对实施SVE的系统的影响
苹果语音助手操作原理?细数“Hey Siri”,背后付出的努力与小心思
构建智慧城市和可持续社区需有哪些技术付出
软件定义存储的实施是对的吗
美国对EDA软件实施新的出口管制
没有实施APS软件的工厂,常常面临的问题





 工商网监
工商网监
评论