 所有行业的数据采集:衰减双极性输入
所有行业的数据采集:衰减双极性输入
今天,我们将介绍一种配置,该配置引入了另一项细微修改,使ADAQ798x能够转换更大的双极性信号(例如±10 V)。我们将首先了解如何选择相关电阻以实现所需的输入范围,然后了解这些值如何影响系统的输入阻抗和本底噪声。
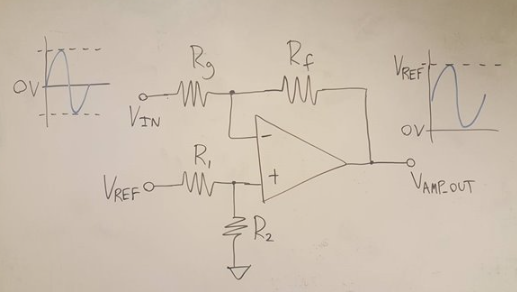
用于衰减的同相求和配置
以下配置可用于对大于±V的信号执行具有衰减的双极性至单极性转换裁判.
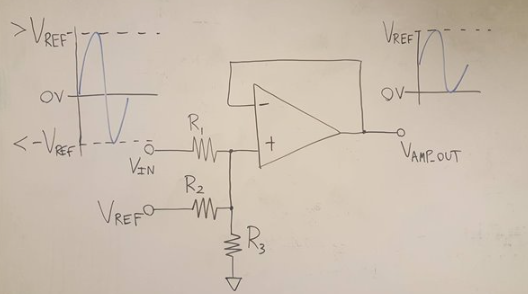
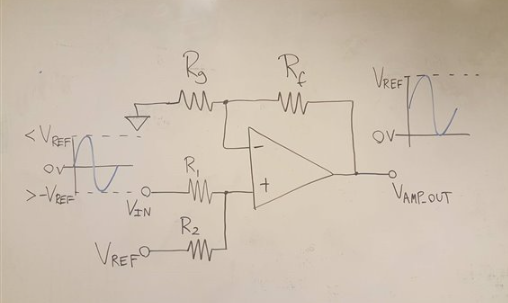
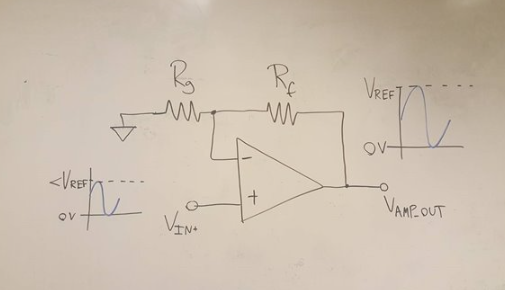
此配置类似于我们上次讨论的配置,除了 Rf和 Rg不再需要,R3添加以提供额外的信号衰减。此配置的传递函数为:

推导出 R 比率所需的数学运算1到 R2到 R3这次有点复杂,但我们可以使用与上一个配置类似的方法。找到电阻器的比率后,可以根据应用的需要选择特定的值。为了简洁起见,我们不会介绍推导的每一步,但我们将看到传递函数如何简化,以便在查看v的最小值和最大值时为我们提供电阻比。在.
R的比率1到 R2使用配置的传递函数通过插入最小值 v 找到在,这导致 vAMP_OUT等于 0 V:
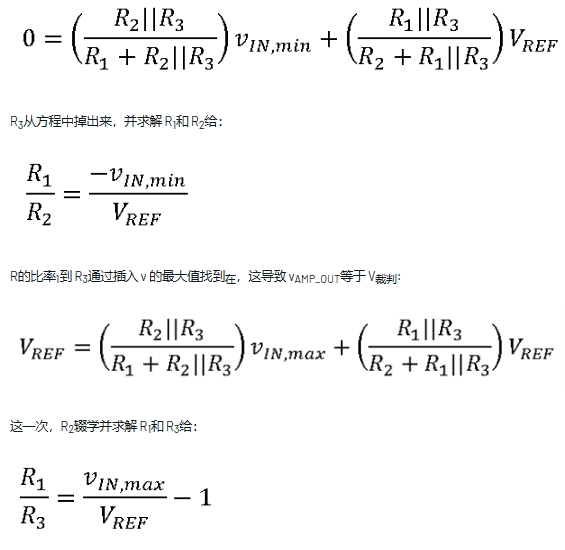
此时,我们可以为其中任意三个电阻选择一个值(给定VREF和vIN的范围),然后计算其他两个电阻的值。和以前一样,主要的权衡是输入阻抗与系统噪声和失调误差的关系。该电路的输入阻抗(ZIN)为: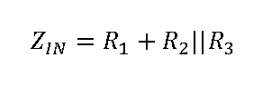
让我们重温一下我们上次提到的例子,其中 vin ±10 V 和VREF= 5 V,并设计输入阻抗为1 MΩ的配置。对于 v 的这种组合在和 V裁判/ 11必须是两倍 R2并等于 R3.使用 R 的比率2和 R3到 R1在输入阻抗方程中,我们得到R1= 750 kΩ。R2和 R3因此分别为375 kΩ和750 kΩ。
正如我们在“为双极性输入增加增益”中提到的,输入阻抗和系统噪声性能之间存在权衡。实现高输入阻抗需要大电阻,这些电阻会产生更多的热噪声,并与ADC驱动器的输入电流噪声相互作用,从而产生更多的输入电压噪声。这两者都会增加ADC输入端的有效均方根电压噪声,从而显著降低性能。在上例中,系统总噪声约为334 μV rms(使用5 V基准电压源时,动态范围从15 dB降至5.92 dB,整整下降74.5 dB)!
但还是有希望的!如果我们限制其输入带宽,这种配置实际上可以实现接近最佳性能。例如,如果我们将上述示例中的输入带宽限制为20 kHz,则整个系统噪声将下降近48至91 μV rms(V的动态范围为4.<> dB)裁判= 5 V)!我们可以限制输入带宽(BW在) 通过添加并联电容器 CS,如下所示。请注意,对于这些噪声计算,我们可以处理 R1/ 12和 R3作为单个电阻,RS,其中 RS是 R 的并行组合1/ 12和 R3.
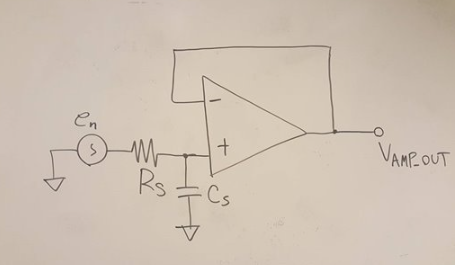
MT-049 显示了如何计算 R 产生的噪声S(包括热噪声及其与ADC驱动器输入电流的相互作用)。ADAQ798x的主要区别在于噪声带宽由集成RC滤波器设置(而不是本教程中的放大器带宽)。R的均方根噪声SADC输入端的加法为:
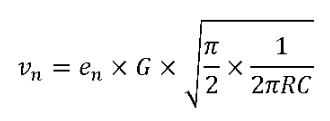
(和n是R的约翰逊噪声SG是ADC驱动器增益。
CS通过降低ADC驱动器输入端的带宽来降低到达ADC的噪声。如果截止频率为RS和 CS比集成RC滤波器(4.42 MHz)小得多,那么R的噪声贡献S可以使用 R 计算S和 CS代替上式中的 R 和 C。
系统总噪声是ADAQ798x中各个噪声源的和方根,包括来自R的噪声源S、ADC 驱动器的输入电压噪声和 ADC 的 RMS 噪声。下图显示了几个R值的系统噪声与输入带宽的关系S.
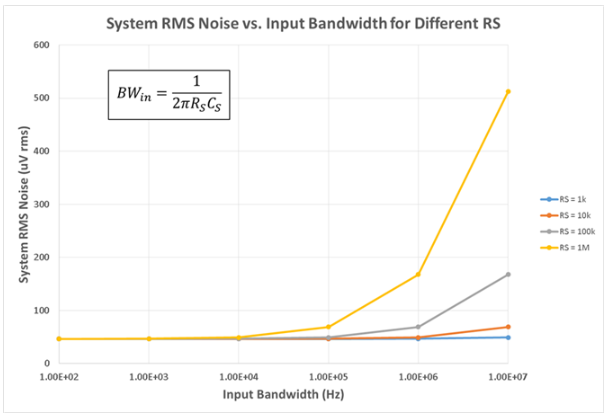
请注意,随着输入带宽的降低,整个系统噪声趋向于ADAQ798x的总均方根噪声(44.4 μV rms)。这意味着降低带宽的噪声优势在一定频率下会产生递减的回报,这取决于R的有效值。S.
结语:
在今天的文章中,我们了解了一种ADC驱动器配置,该配置允许ADAQ798x接受大于±V的双极性输入裁判,以及如何根据电阻值(以及可选的并联电容C)计算输入阻抗和系统噪声S).
虽然添加 CS事实证明,它可以降低噪声,但也限制了可用的输入带宽。因此,在宽带宽应用中使用此配置时,实现高输入阻抗通常是不切实际的。这种配置通常只推荐用于需要高输入阻抗的低带宽应用。
审核编辑:郭婷
-
驱动器
+关注
关注
52文章
8208浏览量
146227 -
滤波器
+关注
关注
161文章
7787浏览量
177957 -
adc
+关注
关注
98文章
6489浏览量
544415
发布评论请先 登录
相关推荐
如何采集ADS1247双极性输入电压?
基于双单片机的多路数据采集系统设计
【数据采集分享】数据采集: 输入界限
全能DAQ ADAQ798x双极性输入的另一种配置
全能DAQ ADAQ798x实现衰减双极性输入的ADC驱动器配置
SMT行业数据采集技术
AD7610:16位、250 kSPS、单极性/双极性可编程输入 PulSAR® ADC 数据手册

ADC驱动器配置,如何实现衰减双极性输入资料下载
所有行业的数据采集:双极性输入的另一种配置
所有行业的DAQ:为双极性输入增加增益
所有行业的数据采集:增加单极性输入的增益
实例分享丨真双极性输入、全差分输出ADC驱动器设计






 工商网监
工商网监
评论