 【技术分享】ZTP800示教器的开发测试过程
【技术分享】ZTP800示教器的开发测试过程
示教器的使用环境通常是电磁干扰、温湿度变化、灰尘覆盖等多变的工业场所,同时示教器作为手持操作装置,也存在脱手跌落、振动冲击等可能性。那么示教器该如何应对?ZTP800示教器的开发测试过程告诉你。
ZTP800示教器(移动HMI)是广州致远电子股份有限公司开发的最新一代智能机器人示教器(移动HMI),产品在开发设计过程中,通过了环境/EMC/防尘/跌落/振动/悬挂等一系列的严格测试,使得ZTP800示教器可以自由应对各种复杂甚至恶劣的使用环境,满足不同场景使用的需求。1.环境适应性测试ZTP800示教器的使用环境除了常温,也会在低温、高温、温度急剧变化、湿热等环境下运行,根据GB/T 2423.1-2008、GB/T 2423.2-2008、GB/T 2423.3-2016、GB/T 2423.22-2012等标准,ZTP800示教器的工作温度范围为﹣10℃~﹢50℃、贮存温度范围为﹣20℃~﹢60℃的条件下,进行功能测试并判定通过。如图1所示。
图12.电磁兼容性测试示教器的应用场合是工厂自动化、机器人控制等工业场合,电磁环境复杂多变。ZTP800示教器同样进行各种电磁兼容性项目的严格测试并判定通过,其测试结果如表1所示。图2 图3表1ZTP800电磁兼容(EMC)特性参数
图3表1ZTP800电磁兼容(EMC)特性参数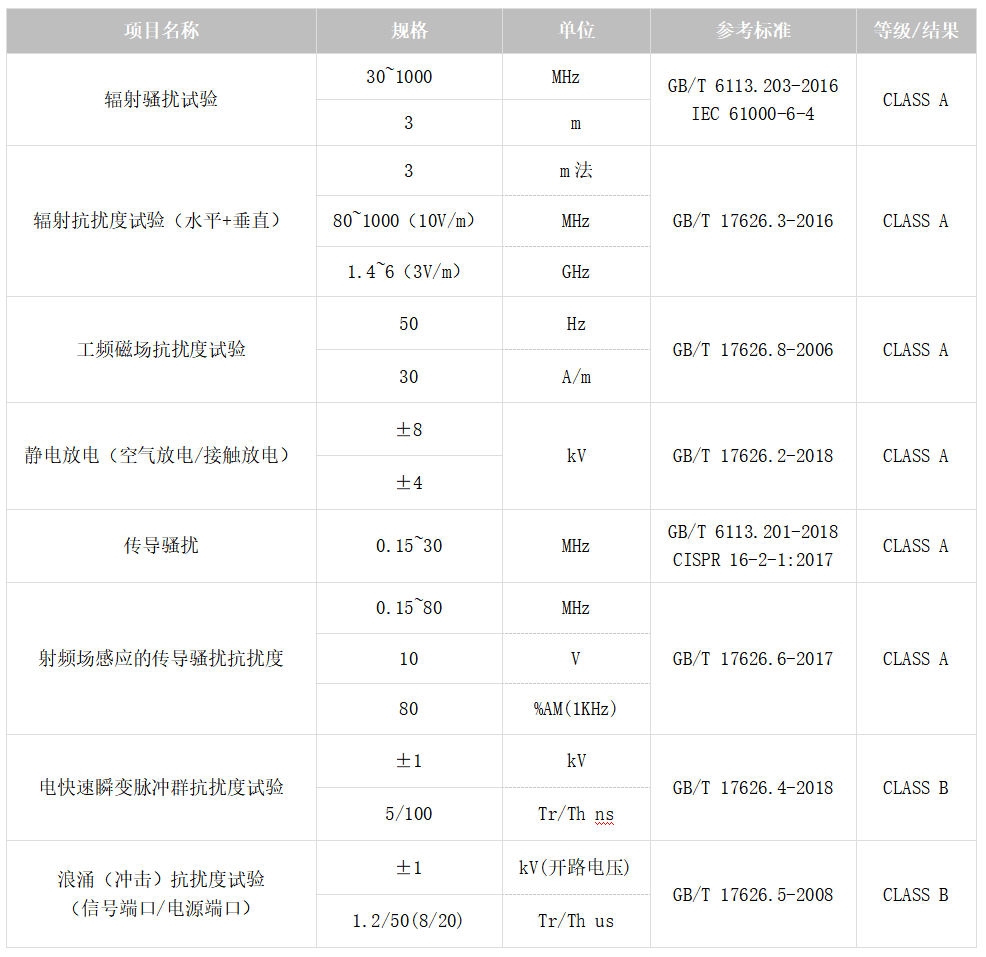 3. 功能性能测试ZTP800示教器在开关机、复位、以太网、USB、TF卡、RTC、蜂鸣器、固件烧写、UART、CAN、LCD触摸显示、按键旋钮、掉电续航等项目上,按照ZLG致远电子公司内部的产品测试标准,全部进行测试并判定通过。特别是以太网/CAN/RS485等通信接口都有12小时以上的稳定性测试记录,其中以太网的速率测试结果如表2、表3所示。表2ZTP800以太网发送速率测试结果
3. 功能性能测试ZTP800示教器在开关机、复位、以太网、USB、TF卡、RTC、蜂鸣器、固件烧写、UART、CAN、LCD触摸显示、按键旋钮、掉电续航等项目上,按照ZLG致远电子公司内部的产品测试标准,全部进行测试并判定通过。特别是以太网/CAN/RS485等通信接口都有12小时以上的稳定性测试记录,其中以太网的速率测试结果如表2、表3所示。表2ZTP800以太网发送速率测试结果 表3ZTP800以太网接收速率测试结果
表3ZTP800以太网接收速率测试结果 4. 振动与冲击测试产品在生产、组装、运输、使用等过程环节,都有可能带有机械环境的变化,包括振动和冲击。ZTP800示教器分别在带包装和裸机的情况下,根据GB/T 2423.10-2019、GB/T 2423.5-2019的试验方法,进行10Hz~50Hz的振动和峰值加速度为150m/s²的X/Y/Z三轴的冲击测试并判定通过。如图4所示。
4. 振动与冲击测试产品在生产、组装、运输、使用等过程环节,都有可能带有机械环境的变化,包括振动和冲击。ZTP800示教器分别在带包装和裸机的情况下,根据GB/T 2423.10-2019、GB/T 2423.5-2019的试验方法,进行10Hz~50Hz的振动和峰值加速度为150m/s²的X/Y/Z三轴的冲击测试并判定通过。如图4所示。 图4
5. 跌落测试示教器作为手持操作装置,在使用或者悬挂的过程中,都会存在自由跌落的可能性。为给用户增强使用产品的信心,ZTP800示教器根据GB/T 2423.7-2018标准,结合实际使用环境,进行了1米高度的跌落测试并判定通过。如图5所示。
图4
5. 跌落测试示教器作为手持操作装置,在使用或者悬挂的过程中,都会存在自由跌落的可能性。为给用户增强使用产品的信心,ZTP800示教器根据GB/T 2423.7-2018标准,结合实际使用环境,进行了1米高度的跌落测试并判定通过。如图5所示。 图56.防尘(IP6X)测试在工厂自动化、机器人控制等工业场合下,灰尘也是影响产品长期使用的一个隐患,为应对此隐患,ZTP800示教器从设计方案就在结构上做了处理。根据GB/T 4208-2017外壳防护等级进行IP6X防尘测试并判定通过,如图6所示。
图56.防尘(IP6X)测试在工厂自动化、机器人控制等工业场合下,灰尘也是影响产品长期使用的一个隐患,为应对此隐患,ZTP800示教器从设计方案就在结构上做了处理。根据GB/T 4208-2017外壳防护等级进行IP6X防尘测试并判定通过,如图6所示。
 图67. 悬挂测试ZTP800示教器后壳设计有一个提手,可悬挂示教器到机柜、墙壁等地方。为了防止示教器提手断裂导致示教器跌落,在提手设计时就对结构和材料进行加强处理,同时还专门进行了加重5KG的长期悬挂测试(目前已经连续悬挂6个月的时间,暂时提手没有断裂现象),如图7所示。
图67. 悬挂测试ZTP800示教器后壳设计有一个提手,可悬挂示教器到机柜、墙壁等地方。为了防止示教器提手断裂导致示教器跌落,在提手设计时就对结构和材料进行加强处理,同时还专门进行了加重5KG的长期悬挂测试(目前已经连续悬挂6个月的时间,暂时提手没有断裂现象),如图7所示。 图7如需测试报告,请联系致远电子技术支持中心。
图7如需测试报告,请联系致远电子技术支持中心。
图3表1ZTP800电磁兼容(EMC)特性参数
3. 功能性能测试ZTP800示教器在开关机、复位、以太网、USB、TF卡、RTC、蜂鸣器、固件烧写、UART、CAN、LCD触摸显示、按键旋钮、掉电续航等项目上,按照ZLG致远电子公司内部的产品测试标准,全部进行测试并判定通过。特别是以太网/CAN/RS485等通信接口都有12小时以上的稳定性测试记录,其中以太网的速率测试结果如表2、表3所示。表2ZTP800以太网发送速率测试结果
表3ZTP800以太网接收速率测试结果
4. 振动与冲击测试产品在生产、组装、运输、使用等过程环节,都有可能带有机械环境的变化,包括振动和冲击。ZTP800示教器分别在带包装和裸机的情况下,根据GB/T 2423.10-2019、GB/T 2423.5-2019的试验方法,进行10Hz~50Hz的振动和峰值加速度为150m/s²的X/Y/Z三轴的冲击测试并判定通过。如图4所示。图4
5. 跌落测试示教器作为手持操作装置,在使用或者悬挂的过程中,都会存在自由跌落的可能性。为给用户增强使用产品的信心,ZTP800示教器根据GB/T 2423.7-2018标准,结合实际使用环境,进行了1米高度的跌落测试并判定通过。如图5所示。图56.防尘(IP6X)测试在工厂自动化、机器人控制等工业场合下,灰尘也是影响产品长期使用的一个隐患,为应对此隐患,ZTP800示教器从设计方案就在结构上做了处理。根据GB/T 4208-2017外壳防护等级进行IP6X防尘测试并判定通过,如图6所示。
图67. 悬挂测试ZTP800示教器后壳设计有一个提手,可悬挂示教器到机柜、墙壁等地方。为了防止示教器提手断裂导致示教器跌落,在提手设计时就对结构和材料进行加强处理,同时还专门进行了加重5KG的长期悬挂测试(目前已经连续悬挂6个月的时间,暂时提手没有断裂现象),如图7所示。图7如需测试报告,请联系致远电子技术支持中心。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
致远电子
+关注
关注
13文章
410浏览量
31610
原文标题:【技术分享】ZTP800示教器的开发测试过程
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
智能拖动示教喷涂机器人:技术革新与未来展望
智能拖动示教喷涂机器人是近年来工业自动化领域的一项重要创新,它的出现不仅极大地提升了喷涂作业的效率和质量,还为传统制造业的转型升级提供了有力支持。本文将从智能拖动示教喷涂机

讯维分布式可视化医疗示教系统,开启智慧医疗,远程示教全新应用
医学的发展改变了医生医治病人的方式,视频通讯系统则使医生共享信息的方式发生了改变。随着国家对医疗卫生人才培养力度的加大,手术示教和医疗观摩系统逐步成为近年来医院信息化建设的一个热点。

示教器的革新:无线连接,无限可能
导读在自动化生产线中,传统有线示教器因成本高、调试效率低和安全隐患等问题,限制了生产效率和安全性。本文介绍ZTP800-W无线示

什么是拖动示教?机器人拖动示教方式分析
随着拖动示教在协作机器人、并联机器人上的应用,将调试技术趋向快速、简便的方向发展,满足生产企业应用机器人进行及时、高效的生产需求,以及在工业4.0和“中国制造 2025”的背景下,适应现代工业快速

协作机器人拽拖示教详解
执行方式,而无需进行复杂的程序开发和调试过程。 灵活性和适应性:拖动示教使得机器人能够适应不同的任务和环境。操作员可以根据实际需求来调整示
单片机基本io功能调试过程
单片机基本IO功能的调试过程涉及多个步骤,旨在确保IO口能够正确地执行输入和输出操作。以下是一个调试过程,涵盖了从准备阶段到实际测试的关键步骤: 一、准备阶段 确定单片机型号和IO口 : 首先,明确
焊接机器人示教模式怎么设置
在现代制造业中,焊接机器人广泛应用于提高生产效率和焊接质量。而焊接机器人示教模式的正确设置,是确保自动化焊接过程精确执行的重要环节。今天创想智控焊缝跟踪系统小编带大家了解焊接机器人示

工业机器人示教器按钮功能介绍
工业机器人示教器是一个关键的人机交互设备,通过它操作者可以操作工业机器人运动、完成示教编程、实现对系统的设定、故障诊断等。以下是工业机器人
【AWTK使用经验】如何播放视频或摄像头画面
目前想在ZTP800示教器的AWTK程序中实现播放视频或者播放摄像头画面的效果,可以借助AWTK的mutable_image控件或usb_camera控件来显示画
【AWTK使用经验】如何响应物理按键
ZTP800示教器设备上有许多按键,假设想在自己的AWTK程序中检测并使用这些按键响应事件,则需要使用AWTK绑定物理按键的功能。本篇文章将借助一个检测按键的dem
【AWTK使用经验】如何自定义combo_box下拉框样式
需要在ZTP800示教器实现一个用于日期选择的下拉框,并且还要求对下拉框做一些美化,此时就需要用户自定义下拉框样式。下面将结合该需求介绍两种修改combo_box
【插针机HMI开发】用AWTK开发人机界面
插针机中有两个重要的部件HMI和PLC,HMI提供用户操作和界面显示,而PLC则控制电机的运动逻辑。致远电子的ZTP800和AWTK-HMI解决方案可以快速开发插针机或其他设备的HMI界面。视频演示





 工商网监
工商网监
评论